当前位置:网站首页>FreeRTOS创建任务--动态创建、静态创建
FreeRTOS创建任务--动态创建、静态创建
2022-08-02 12:27:00 【山、】
任务创建函数:xTaskCreate()
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, //函数指针
const char * const pcName, //函数名
const configSTACK_DEPTH_TYPE usStackDepth, //栈深度
void * const pvParameters, //参数
UBaseType_t uxPriority, //优先级
TaskHandle_t * const pxCreatedTask // 任务句柄)
每个任务都有一个自己的TCB结构体–tskTaskControlBlock任务控制块,用来保存此任务的各种信息。
函数参数的最后一项就是一个TCB结构体,只不过用TaskHandle_t 表示。
typedef struct tskTaskControlBlock * TaskHandle_t;
可以使用这个任务句柄对该任务进行操作,比如让任务进入休眠态,就把该任务的任务句柄当参数传递给对应函数即可。
注意:FreeRTOS中的任务必须无限循环且不带返回值的形式。
TaskHandle_t xHandleTask1;
void Task1(void * param)
{
while(1)
{
printf("A");
}
}
TaskHandle_t xHandleTask2;
void Task2(void * param)
{
while(1)
{
printf("a");
}
}
int main( void )
{
prvSetupHardware();
printf("Hello World!\r\n");
xTaskCreate(Task1,"Task1",100,NULL,1,&xHandleTask1);
xTaskCreate(Task2,"Task2",100,NULL,1,&xHandleTask2);
vTaskStartScheduler();
return 0;
}
输出结果:
FreeRTOS创建任务除了可以使用xTaskCreate();函数动态创建任务,也可以使用xTaskCreateStatic()函数静态创建任务。
前者动态创建任务,栈空间的分配和TCB结构体等都由系统自动创建分配,用户不需要做其他操作;后者静态创建任务,需要提前为任务分配好任务控制块TCB和栈空间,而且还需要进行一些别的配置。
函数原型: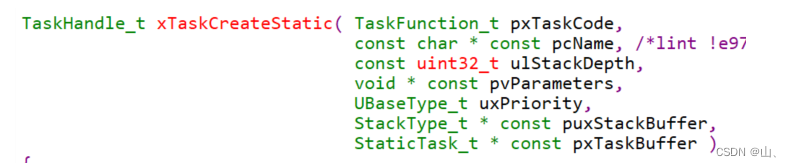
可以看到,静态创建任务函数xTaskCreateStatic()的参数与xTaskCreate();动态创建任务的参数前5个是一样的,都是任务函数指针、任务名字、栈深度、参数、优先级,但是后两个不一样了,一个是栈,一个是任务TCB,这两个都需要用户自己提前创建。
使用静态创建任务函数还需要使能一个宏开关。在tasks.c文件中可以看到要使能宏configSUPPORT_STATIC_ALLOCATION才能使用xTaskCreateStatic()函数。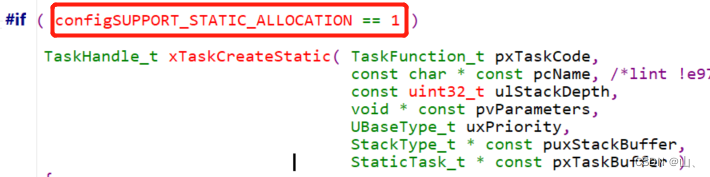
所以在FreeRTOSConfig.h文件中定义configSUPPORT_STATIC_ALLOCATION为1。
#define configSUPPORT_STATIC_ALLOCATION 1
打开启动任务调取器函数vTaskStartScheduler( ),可以看到,如果我们定义了configSUPPORT_STATIC_ALLOCATION,在使用xTaskCreateStatic()函数前,还需要提供一个函数:vApplicationGetIdleTaskMemory()才行。所以我们还需要提供这个此函数才能使用静态创建任务函数。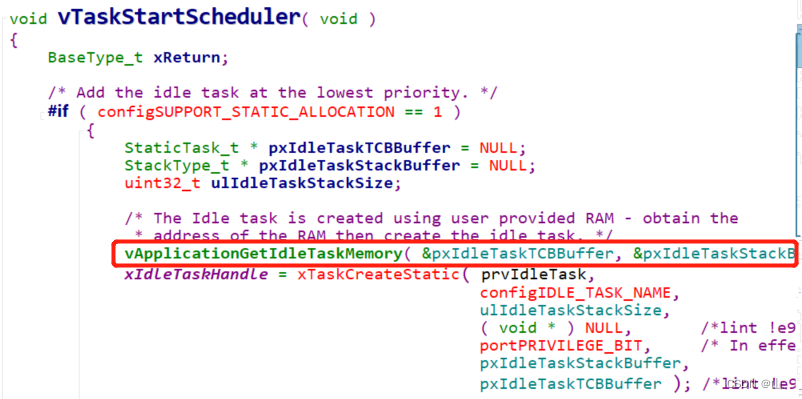
StackType_t xIdleTaskStack[100];
StaticTask_t xIdleTaskTcb;
void vApplicationGetIdleTaskMemory(StaticTask_t * * ppxIdleTaskTCBBuffer, StackType_t * * ppxIdleTaskStackBuffer, uint32_t * pulIdleTaskStackSize)
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTcb;
*ppxIdleTaskStackBuffer = xIdleTaskStack;
*pulIdleTaskStackSize = 100;
}
经过上面两步:使能宏开关、提供vApplicationGetIdleTaskMemory()函数,我们就可以使用静态创建任务函数了。
StackType_t xTask3Stack[100]; //栈
StaticTask_t xTask3Tcb; //TCB结构体
void Task3(void * param)
{
while(1)
{
printf("1");
}
}
int main( void )
{
prvSetupHardware();
printf("Hello World!\r\n");
xTaskCreate(Task1,"Task1",100,NULL,1,&xHandleTask1);
xTaskCreate(Task2,"Task2",100,NULL,1,&xHandleTask2);
xTaskCreateStatic(Task3,"Task3",100,NULL,1,xTask3Stack,&xTask3Tcb);
vTaskStartScheduler();
return 0;
}
输出结果:
可以看到,三个任务都成功运行。
边栏推荐
- ABAP-OOAVL模板程序
- Lexicon 27 - Remove Elements - Simple Questions
- 企业级数据治理工作怎么开展?Datahub这样做
- 喜迎八一 《社会企业开展应聘文职人员培训规范》团体标准出版发行会暨橄榄枝大课堂上线发布会在北京举行
- SQL Server2019安装步骤及脱机安装Microsoft机器学习组件下一步不能继续的问题
- 【The 6th Strong Net Cup CTF-Wp】
- Import and export data of SQL Server database
- Drools(8):WorkBench使用
- Transfer files between servers
- Basic protocol explanation
猜你喜欢

Taurus.MVC V3.0.3 微服务开源框架发布:让.NET 架构在大并发的演进过程更简单。
darknet训练yolov4模型

免费的中英文翻译软件-自动批量中英文翻译软件推荐大全
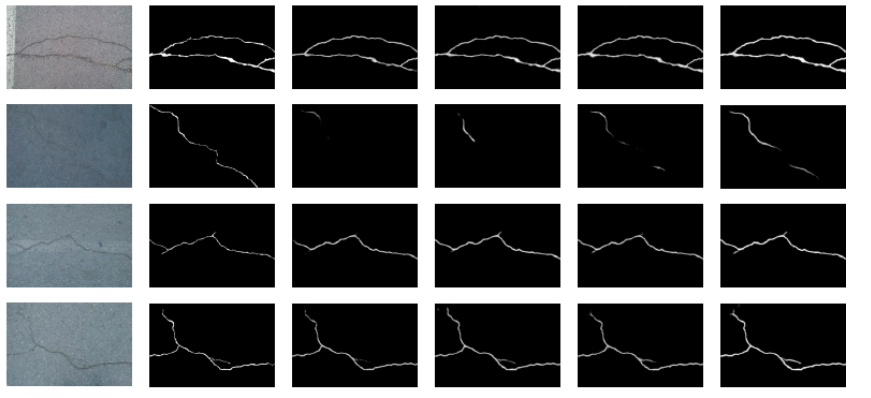
Crack detection technology based on deep learning
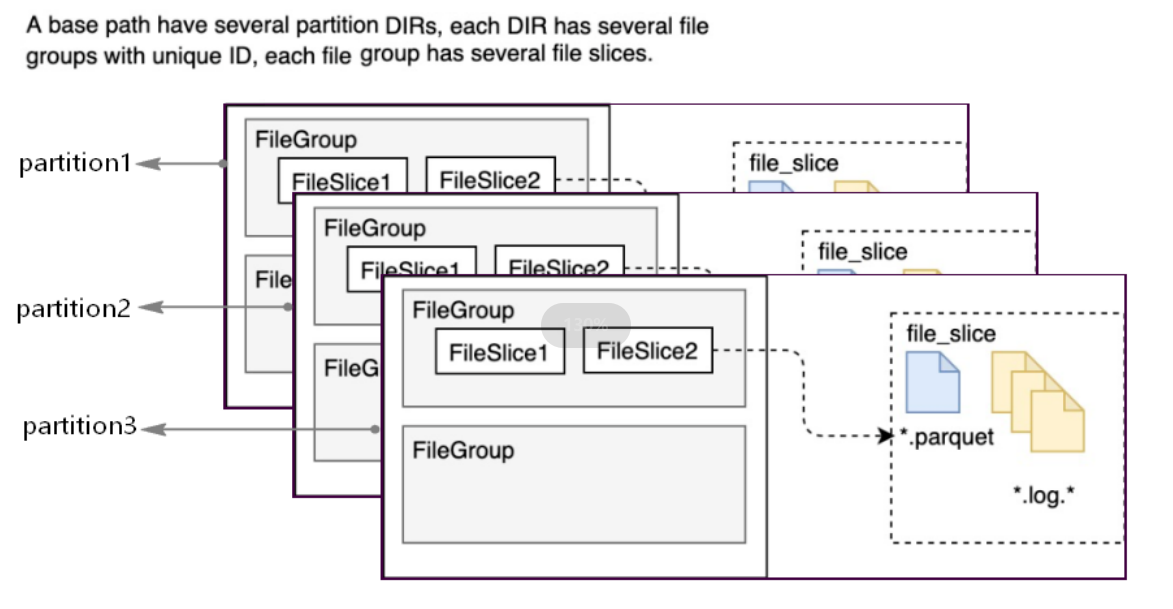
Data Lake (3): Hudi Concept Terminology
Free Chinese-English Translation Software - Automatic Batch Chinese-English Translation Software Recommended Daquan

liunx基础命令讲解
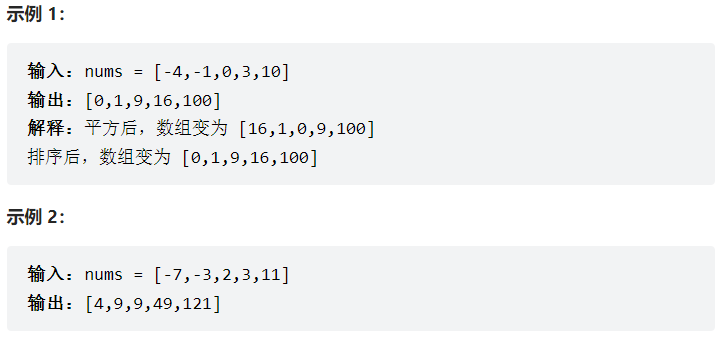
力扣977-有序数组的平方——暴力法&双指针法
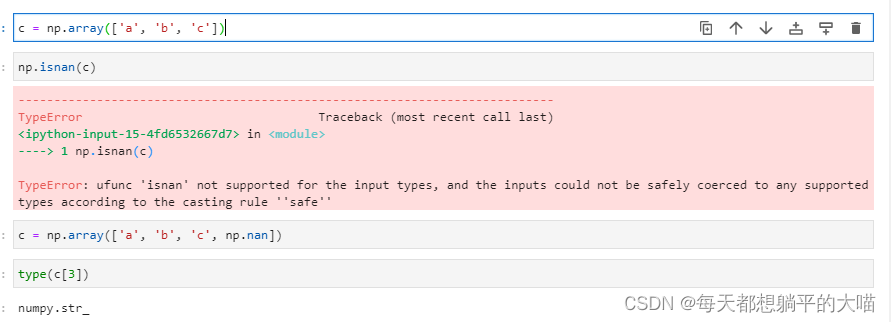
np.nan, np.isnan, None, pd.isnull, pd.isna finishing and summary
photo-sphere-viewer中文文档
随机推荐
Likou 35 - search for insertion position - binary search
Free Chinese-English Translation Software - Automatic Batch Chinese-English Translation Software Recommended Daquan
How to set up wireless PPI communication between Weiluntong touch screen and S7-200smart?
pig4cloud服务架构使用
PHP伪协议详解
智能图像分析-智能家用电器图像目标检测统计计数检测与识别-艾科瑞特科技(iCREDIT)
Chapter 14 Manually create a REST service (2)
Likou 704 - binary search
如何更好评估信用贷风险?看这场评分卡模型直播就可以了
手撸架构,网络 面试36问
内存存储结构
Do you really understand the business process service BPass?
pgsql数据库实现导入导出
力扣35-搜索插入位置——二分查找
解决导出excel文件名中文乱码的问题
自定义mvc框架复习
力扣209-长度最小的字符串——滑动窗口法
simulink PID auto-tuning
服务器间传输文件
NVIDIA NeMo Metrics 轻量性能采集系统