当前位置:网站首页>Matlab simulink particle swarm optimization fuzzy pid control motor pump
Matlab simulink particle swarm optimization fuzzy pid control motor pump
2022-08-01 05:32:00 【student_domi】
1. Introduction
Slightly
463-can communicate, consult, answer questions
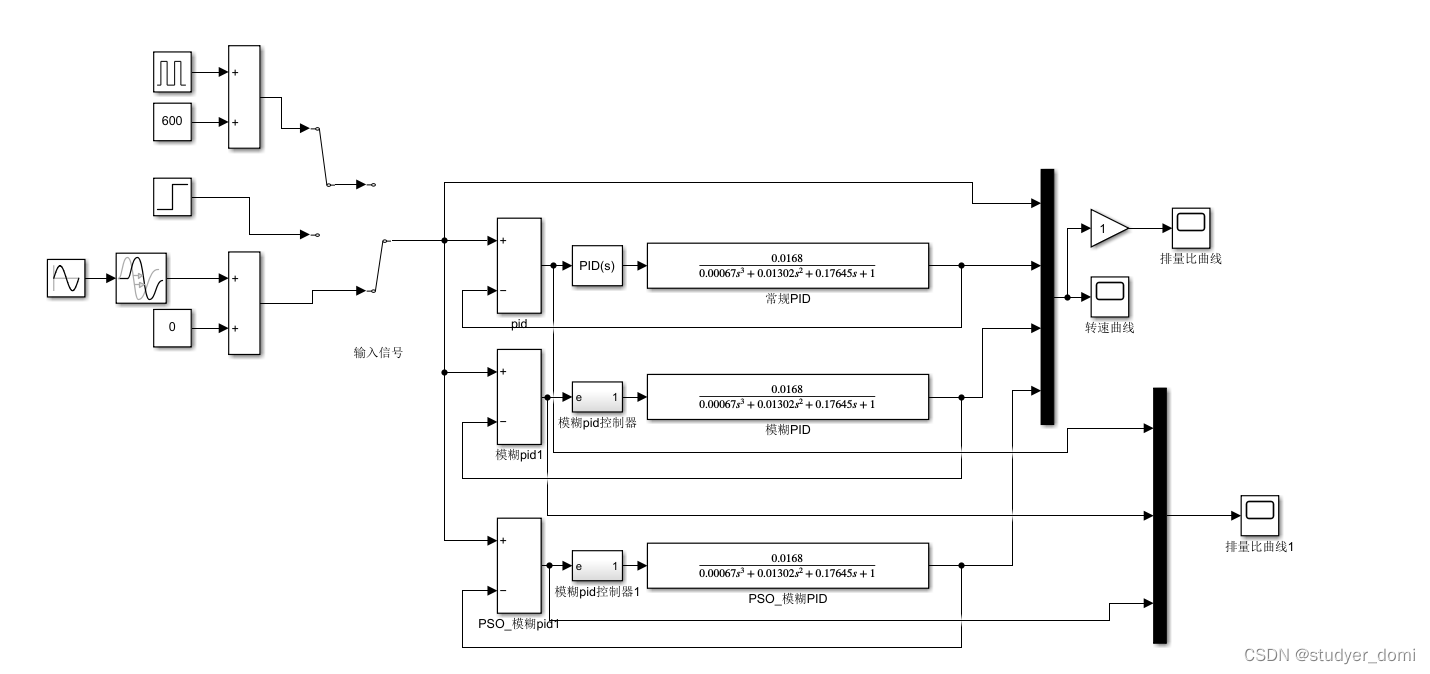
2. Description of content
(1) Step tracking simulation
Set the desired motor speed to step from 0 to 750r/min in 1s. The fuzzy PID simulation results are shown in Figure 1. The fuzzy PID is improved.The simulation curve is shown in Figure 2.In the figure, 1 is the target speed of the motor, and 2 is the simulation curve of the motor speed.
(2) Square wave tracking simulation
Set the desired motor speed as a square wave of 750r/min, the period is 1s, the minimum value is 600r/min, and the maximum value is 900r/min.The fuzzy PID simulation results are shown in Figure 3, and the improved fuzzy PID simulation curve is shown in Figure 4.In the figure, 1 is the target speed of the motor, and 2 is the simulation curve of the motor speed.
(3) Sine tracking simulation
Set the target speed of the motor as a sine wave of 750r/min, the minimum value is 600r/min, and the maximum value is 900r/min.The fuzzy PID simulation results are shown in Figure 5, and the improved fuzzy PID simulation curve is shown in Figure 6.In the figure, 1 is the target speed of the motor, and 2 is the simulation curve of the motor speed.
The simulation results are shown in Figure 3.
(4) Step load simulation
Set the load signal as a step signal, and the load changes from 500N.m to 0N.m in 1s.The expected speed of the motor is a step signal, from 0 r/min to 750 r/min, the fuzzy PID simulation results are shown in Figure 7, and the improved fuzzy PID simulation curve is shown in Figure 8.In the figure, 1 is the target speed of the motor, and 2 is the simulation curve of the motor speed.
(5) Square wave load simulation
The given load signal is a square wave signal, and the load changes from 500N.m to 0N.m in 1s.The expected speed of the motor is a step signal, from 0 r/min to 750 r/min, the fuzzy PID simulation results are shown in Figure 9, and the improved fuzzy PID simulation curve is shown in Figure 10.In the figure, 1 is the target speed of the motor, and 2 is the simulation curve of the motor speed.
(6) Sinusoidal load simulation
The load is a sinusoidal signal, ), the load is from 500N.m in 1sbecomes 0N.m.The expected speed of the motor is a step signal, from 0 r/min to 750 r/min, the fuzzy PID simulation result is shown in Figure 11, and the improved fuzzy PID simulation curve is shown in Figure 12.In the figure, 1 is the target speed of the motor, and 2 is the simulation curve of the motor speed.


3. Simulation analysis
Slightly
4. Reference papers
Research on speed control system of pump-controlled motor based on AMESim and Simulin_omit_combined simulation_Wang Junqian
Particle Swarm Tuning Fuzzy PID Control of Pressure in Dryer Section of Paper Machine_Liu Binchao
边栏推荐
猜你喜欢









随机推荐
Selenium:操作JS
Challenge 52 days to memorize Peppa Pig (Day 01)
曲柄滑块机构运动分析和参数优化
WPF入门项目必知必会-初步了解数据绑定 binding
移动应用恶意攻击激增500% 三六零天御为APP免费构建安全屏障
微信小程序获取手机号phonenumber.getPhoneNumber接口开发
Selenium: Dropdown Box Actions
Selenium:鼠标、键盘事件
torch
The sword refers to Offer 68 - I. Nearest Common Ancestor of Binary Search Trees
Code Interview Guide for Programmers CD15 Generating an Array of Windowed Maximums
crypto-js使用
Win任务栏图标异常解决
2022/07/29 入职健海JustFE团队,我学到了高效开发(年中总结)
WPF项目-按着键盘方向键,移动格子盒子效果
Selenium: element positioning
类神经网络训练不起来怎么办
PAT serie b write the number 1002
Vsce package after the Command failed: NPM list - production - parseable - the depth = 99999 - loglevel = error exception
Talk about the bugs in using for in to traverse the array in js