当前位置:网站首页>4.1 Temporal Differential of one step
4.1 Temporal Differential of one step
2022-07-03 10:09:00 【Most appropriate commitment】
Catalog
Off-policy TD Control (Q-learning)
Definition
![v_{\pi_{t}}(s) \ \\ =\ E[ R_{t+1}+\gamma v_{ \pi_{t+1}} ] = \sum _a \pi(a|s) \sum _{r,s'}p(r,s'|s,a)(r+\gamma v(s')) =max_a \ \sum _{r,s'}p(r,s'|s,a)(r+\gamma v(s')) \\ =E[ G_t ] = average(G_t) \ in\ every\ s \\ \ =E[ R_{t+1}+\gamma G_{t+1} ]\approx average(R_{t+1}+\gamma v(s'))](http://img.inotgo.com/imagesLocal/202202/15/202202150539010219_10.gif)
![q_{\pi_t}(s,a) \\=E[R_{t+1}+\gamma q_{\pi_{t+1}}(s,a)]=\sum _{r,s'}p(r,s'|s,a)(r+\sum _{a'}\pi(a'|s')\gamma q(s',a')) = \sum _{r,s'}p(r,s'|s,a)(r+\gamma max_{a'} \ q(s',a')) \\=E[G_t(s,a)]=average(R_{t+1}+\gamma G_{t+1}(s,a)) \\=E[R_{t+1}+\gamma G_{t+1}]=average(R_{t+1}+\gamma q(S_{t+1},A_{t+1}))](http://img.inotgo.com/imagesLocal/202202/15/202202150539010219_15.gif)
Dynamic Programming uses the euqations in the second line and has to know the environmental dynamics ( dynamics of environemnt can produce the chain between this state to the next state, but it's hard to know. Cons ) ( It uses the relationship between different states, which creates bootstrapping. Experience from other states can be used in this state. Pros )
Monte Carlo Method uses the equations in the third line and has to know the returns from entire results ( which can produce the relationship between different states when we do not know the environmental dynamics Pros, and dynamics of environment may not precise as the Monte Carlo) ( However, when the episodes are not fully visited and updated, the values can only be updates partically )
Temporal Differential (shorten as TD) is the combination of DP and MC. First, it could update from other states, which means the states from A episode(not appear in B episide) can use the experience from B episide, because the value table is commonly used. It can avoid partially estimation from MC. Secondly, it uses the episodes from real world, we do not need the dynamics of programming.
Prediction of TD(0)
loop until the error < MINIMUM_OF_LIMIT:
v_last = v;
loop in the episode:
Choose action from policy in state, then get the reward and next state from episode;

error = maximum( |v - v_last| )
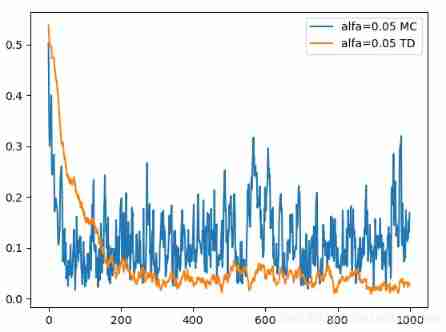
Random Walk
The result tells us TD is quiet greater than MC.



## settings
import math
import numpy as np
import random
# visualization
import matplotlib
import matplotlib.pyplot as plt
from matplotlib.ticker import MultipleLocator
# INVARIANT
# state
STATE_LEFT = 0;
A = 1 ;
B = 2;
C = 3;
D = 4;
E = 5;
STATE_RIGHT = 6;
STATE =[ A,B,C,D,E ]
TERMINAL_STATE = [STATE_LEFT,STATE_RIGHT];
# action
LEFT = -1;
RIGHT = 1;
ACTION = [LEFT,RIGHT];
# random policy
random_policy = np.zeros((7,2),dtype = np.float);
for state in STATE:
random_policy[state][LEFT] = 0.5;
random_policy[state][RIGHT] = 0.5;
# discount
gamma = 1;
ALFA =[0.05,0.1,0.2];
# loop number
LOOP_EPISODE = 1000;
targets = [1.0/6,2.0/6,3.0/6,4.0/6,5.0/6]
# get reward
def get_reward(next_state):
return 1 if next_state==STATE_RIGHT else 0;
# get action
def get_action(state,policy):
p=[];
for action in ACTION:
p.append(policy[state][action]) ;
return np.random.choice(ACTION,p=p)
# Agent class
class Agent_class():
def __init__(self):
self.state_set=[];
self.reward_set=[];
self.current_state = C;
self.state_set.append(C);
def finish_sampling(self,policy):
while self.current_state in STATE:
action = get_action( self.current_state,policy );
self.current_state += action;
self.state_set.append(self.current_state);
self.reward_set.append(get_reward(self.current_state));
def get_rms(predictions,targets):
return np.sqrt( ((predictions-targets)**2).mean() );
for alfa in ALFA:
V_MC = np.zeros(7,dtype = np.float);
V_TD = np.zeros(7,dtype = np.float);
MC_RSM=[];
TD_RSM=[];
for every_loop in range(0,LOOP_EPISODE):
agent = Agent_class();
agent.finish_sampling(random_policy);
for state in range(0,len(agent.state_set)-1):
current_state = agent.state_set[state];
next_state = agent.state_set[state+1];
V_TD[current_state] = (1-alfa)*V_TD[ current_state ] + \
alfa*( agent.reward_set[state] + gamma *V_TD[ next_state ]);
G_t = agent.reward_set[-1];
for i in range(1,len(agent.state_set)):
current_state = agent.state_set[-i-1];
next_state = agent.state_set[-i];
V_MC[current_state] = (1-alfa)*V_MC[current_state] + \
alfa*gamma*G_t;
MC_RSM.append( get_rms(V_MC[1:6],targets) );
TD_RSM.append( get_rms(V_TD[1:6],targets) );
plt.plot(MC_RSM,'-',label='alfa='+str(alfa)+' MC');
plt.plot(TD_RSM,'-',label='alfa='+str(alfa)+' TD');
plt.legend();
plt.show()
'''
plt.plot(V_MC[1:6],label='alfa='+str(alfa)+' MC')
plt.plot(V_TD[1:6],label='alfa='+str(alfa)+' TD')
plt.legend();
plt.show()
'''
On-policy TD Control (Sarsa)

After every updation of every state in an episode, we could update the policy quickly rather than after every total episode in Monte Carlo.
Windy Gridworld
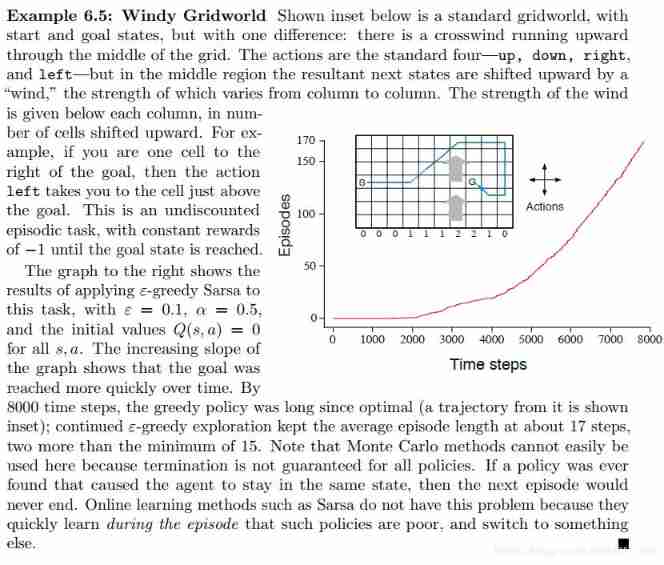 State: every position in this grid, the terminal state is the goal position.
State: every position in this grid, the terminal state is the goal position.
Action: left,right,up,down. there are some additional actions in the center of the gridworld.
reward: -1, until arrive at the terminal state.
policy evauluation: TD(0)
policy improvement: update after the iteration in every state
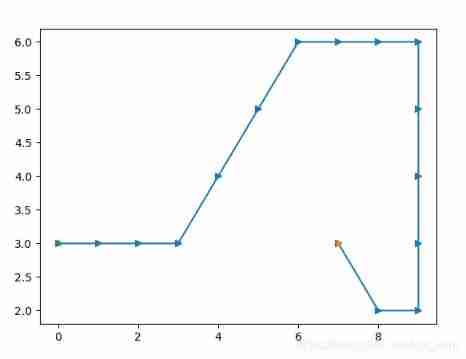
When soft-policy is applied (sigma=0.05,it's constant), we could get good result even optimal result sometimes.


When soft-policy is applied (sigma=0.05,it's decreasing from 0.05 to 0), we could get optimal result .

Code
## settings
import math
import numpy as np
import random
# visualization
import matplotlib
import matplotlib.pyplot as plt
from matplotlib.ticker import MultipleLocator
# list copy
import copy
# INVARIANTS
#state (x,y)
STATE_INITIAL = (0,3);
STATE_GOAL = (7,3)
WIDTH = 10;
HEIGHT = 7;
# action
LEFT = (-1,0);
RIGHT = (1,0);
UP = (0,1);
DOWN = (0,-1);
ACTION_INTENDED = [LEFT,RIGHT,UP,DOWN];
# policy pi(a|s) which start at random policy, and updated after every iteration (function)
policy_target={}; # policy[(x,y)][action]
dict_actions_policy={};
for action in ACTION_INTENDED:
dict_actions_policy[action]=1/len(ACTION_INTENDED);
for x in range(0,WIDTH):
for y in range(0,HEIGHT):
policy_target[(x,y)] = copy.deepcopy(dict_actions_policy)
# reward: q_s_a(STATE_GOAL)=0, reward in every step is -1.
R = -1;
# special part: windy_effect, which will change the action_intended into action_actual
# there are different influence on different x.
# 1 unit influence will produce additional up in gridworld.
ACTION_WIND_EFFECT = [0,0,0,1,1,1,2,2,1,0];
# parameters we set
# sigma-policy
SIGMA = 0.05;
# number of episode
LOOP_EPISODE = 200;
# discounting parameter
gamma = 1;
# iteration step
alfa = 0.5;
# FUNCTIONS
# FUNCTIONS in policy evaluation
def choose_action(state,policy):
p=[];
index=range(0,len(ACTION_INTENDED));
for action in ACTION_INTENDED:
p.append(policy[state][action]);
action_intended = ACTION_INTENDED[np.random.choice(index,p=p)];
return action_intended;
# actual action taken (update after choice of actions )
def get_actual_action(state,action_intended):
x = action_intended[0]
y = action_intended[1] + ACTION_WIND_EFFECT[ state[0] ];
return ( (x,y) );
# state after the actual action taken
# the agent could not get out of the grid world.
def get_state_next(state,action):
state_next = ( state[0]+action[0], state[1]+action[1] );
x = max(state_next[0],0);
x = min(x,WIDTH-1);
y = max(state_next[1],0);
y = min(y,HEIGHT-1);
return (x,y);
# FUNCTIONS in policy improvement
# update after every iteration and use sigma-policy
def policy_updation(state,Q_s_a,policy):
Q=[];
for action in ACTION_INTENDED:
Q.append(Q_s_a[state][action]);
action_max = ACTION_INTENDED[np.argmax(Q)];
for action in ACTION_INTENDED:
policy[state][action] = sigma/len(ACTION_INTENDED);
policy[state][action_max] += 1 - sigma;
# CLASS
# CLASS Agent
class Agent_class():
def __init__(self):
# q_s_a[state][action] initial value =0;
self.Q_s_a={};
self.policy = copy.deepcopy( policy_target );
dict_q_action={};
for action in ACTION_INTENDED:
dict_q_action[action] = 0;
for x in range(0,WIDTH):
for y in range(0,HEIGHT):
self.Q_s_a[(x,y)] = copy.deepcopy( dict_q_action );
self.action_total_set=[];
self.state_total_set=[];
# current state
self.current_state = STATE_INITIAL;
# current action
self.current_intended_action = choose_action(self.current_state,self.policy)
self.current_actual_action = get_actual_action(self.current_state,self.current_intended_action);
def finish_journey(self):
# current state
self.current_state = STATE_INITIAL;
# current action
self.current_intended_action = choose_action(self.current_state,self.policy)
self.current_actual_action = get_actual_action(self.current_state,self.current_intended_action);
# state set and action set
action_set=[];
state_set=[];
action_set.append( self.current_intended_action );
state_set.append( self.current_state );
next_state = get_state_next(self.current_state,self.current_actual_action);
while next_state != STATE_GOAL:
# get the next action;
next_action_intended = choose_action(next_state,self.policy);
next_action_actual = get_actual_action(next_state,next_action_intended)
# policy evaluation
self.Q_s_a[self.current_state][self.current_intended_action] = (1-alfa)*\
self.Q_s_a[self.current_state][self.current_intended_action] + alfa* \
(R + self.Q_s_a[next_state][next_action_intended]);
#policy improvement
policy_updation(self.current_state,self.Q_s_a,self.policy)
# update current state and action
self.current_intended_action = next_action_intended;
self.current_actual_action = next_action_actual;
self.current_state = next_state;
# append of state set and action set
action_set.append( self.current_intended_action );
state_set.append( self.current_state );
# get next state
next_state = get_state_next(self.current_state,self.current_actual_action);
# update when next state is terminal state
state_set.append(next_state)
self.Q_s_a[self.current_state][self.current_intended_action] = (1-alfa)*\
self.Q_s_a[self.current_state][self.current_intended_action] + alfa* R;
self.action_total_set.append(action_set);
self.state_total_set.append(state_set);
def show_step(self):
x=[];
y=[];
for state in self.state_total_set[-1]:
x.append(state[0]);
y.append(state[1]);
plt.plot(x,y,'->')
plt.plot(STATE_GOAL[0],STATE_GOAL[1],'*')
plt.plot(STATE_INITIAL[0],STATE_INITIAL[1],'*')
plt.show();
def show_step_number_of_every_episode(self):
number=[];
for i in range(0,len(self.action_total_set)):
number.append(len(self.action_total_set[i]));
plt.plot(number,'-*')
plt.xlabel('number of episodes')
plt.ylabel('number of steps')
plt.show();
# main programming
agent = Agent_class();
for every_loop in range(0,LOOP_EPISODE):
#sigma = SIGMA*(LOOP_EPISODE-every_loop)/LOOP_EPISODE;
sigma = SIGMA;
agent.finish_journey();
agent.show_step();
agent.show_step_number_of_every_episode();
Off-policy TD Control (Q-learning)

Result
When soft-policy is applied (sigma=0.05,constant), we could get good result . Because it will have some non-perfect actions.
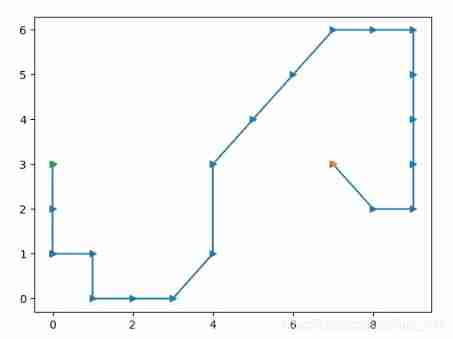
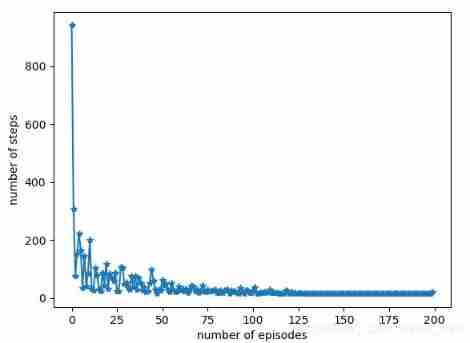
When soft-policy is applied (sigma=0.05,it's decreasing from 0.05 to 0), we could get optimal result . But more episodes are needed than Sarsa.




Code
## settings
import math
import numpy as np
import random
# visualization
import matplotlib
import matplotlib.pyplot as plt
from matplotlib.ticker import MultipleLocator
# list copy
import copy
# INVARIANTS
#state (x,y)
STATE_INITIAL = (0,3);
STATE_GOAL = (7,3)
WIDTH = 10;
HEIGHT = 7;
# action
LEFT = (-1,0);
RIGHT = (1,0);
UP = (0,1);
DOWN = (0,-1);
ACTION_INTENDED = [LEFT,RIGHT,UP,DOWN];
# policy pi(a|s) which start at random policy, and updated after every iteration (function)
policy_target={}; # policy[(x,y)][action]
dict_actions_policy={};
for action in ACTION_INTENDED:
dict_actions_policy[action]=1/len(ACTION_INTENDED);
for x in range(0,WIDTH):
for y in range(0,HEIGHT):
policy_target[(x,y)] = copy.deepcopy(dict_actions_policy)
# reward: q_s_a(STATE_GOAL)=0, reward in every step is -1.
R = -1;
# special part: windy_effect, which will change the action_intended into action_actual
# there are different influence on different x.
# 1 unit influence will produce additional up in gridworld.
ACTION_WIND_EFFECT = [0,0,0,1,1,1,2,2,1,0];
# parameters we set
# sigma-policy
SIGMA = 0.05;
# number of episode
LOOP_EPISODE = 100;
# discounting parameter
gamma = 1;
# iteration step
alfa = 0.5;
# FUNCTIONS
# FUNCTIONS in policy evaluation
def choose_action(state,policy):
p=[];
index=range(0,len(ACTION_INTENDED));
for action in ACTION_INTENDED:
p.append(policy[state][action]);
action_intended = ACTION_INTENDED[np.random.choice(index,p=p)];
return action_intended;
def choose_max_action(state,Q_s_a):
Q=[];
choice=[];
for action in ACTION_INTENDED:
Q.append(Q_s_a[state][action]);
for i in range(0,len(Q)):
if Q[i]==max(Q):
choice.append(ACTION_INTENDED[i]);
action_max = random.choice(choice);
return action_max;
# actual action taken (update after choice of actions )
def get_actual_action(state,action_intended):
x = action_intended[0]
y = action_intended[1] + ACTION_WIND_EFFECT[ state[0] ];
return ( (x,y) );
# state after the actual action taken
# the agent could not get out of the grid world.
def get_state_next(state,action):
state_next = ( state[0]+action[0], state[1]+action[1] );
x = max(state_next[0],0);
x = min(x,WIDTH-1);
y = max(state_next[1],0);
y = min(y,HEIGHT-1);
return (x,y);
# FUNCTIONS in policy improvement
# update after every iteration and use sigma-policy
def policy_updation(state,Q_s_a,policy):
Q=[];
for action in ACTION_INTENDED:
Q.append(Q_s_a[state][action]);
action_max = ACTION_INTENDED[np.argmax(Q)];
for action in ACTION_INTENDED:
policy[state][action] = sigma/len(ACTION_INTENDED);
policy[state][action_max] += 1 - sigma;
# CLASS
# CLASS Agent
class Agent_class():
def __init__(self):
# q_s_a[state][action] initial value =0;
self.Q_s_a={};
self.policy = copy.deepcopy( policy_target );
dict_q_action={};
for action in ACTION_INTENDED:
dict_q_action[action] = 0;
for x in range(0,WIDTH):
for y in range(0,HEIGHT):
self.Q_s_a[(x,y)] = copy.deepcopy( dict_q_action );
self.action_total_set=[];
self.state_total_set=[];
# current state
self.current_state = STATE_INITIAL;
# current action
self.current_intended_action = choose_action(self.current_state,self.policy)
self.current_actual_action = get_actual_action(self.current_state,self.current_intended_action);
def finish_journey(self):
# current state
self.current_state = STATE_INITIAL;
# current action
self.current_intended_action = choose_action(self.current_state,self.policy)
self.current_actual_action = get_actual_action(self.current_state,self.current_intended_action);
# state set and action set
action_set=[];
state_set=[];
action_set.append( self.current_intended_action );
state_set.append( self.current_state );
next_state = get_state_next(self.current_state,self.current_actual_action);
while next_state != STATE_GOAL:
# get the next action;
next_action_intended = choose_max_action(next_state,self.Q_s_a);
next_action_actual = get_actual_action(next_state,next_action_intended)
# policy evaluation
self.Q_s_a[self.current_state][self.current_intended_action] = (1-alfa)*\
self.Q_s_a[self.current_state][self.current_intended_action] + alfa* \
(R + self.Q_s_a[next_state][next_action_intended]);
#policy improvement
policy_updation(self.current_state,self.Q_s_a,self.policy)
# update current state and action
self.current_intended_action = next_action_intended;
self.current_actual_action = next_action_actual;
self.current_state = next_state;
# append of state set and action set
action_set.append( self.current_intended_action );
state_set.append( self.current_state );
# get next state
next_state = get_state_next(self.current_state,self.current_actual_action);
# update when next state is terminal state
state_set.append(next_state)
self.Q_s_a[self.current_state][self.current_intended_action] = (1-alfa)*\
self.Q_s_a[self.current_state][self.current_intended_action] + alfa* R;
self.action_total_set.append(action_set);
self.state_total_set.append(state_set);
def show_step(self):
x=[];
y=[];
for state in self.state_total_set[-1]:
x.append(state[0]);
y.append(state[1]);
plt.plot(x,y,'->')
plt.plot(STATE_GOAL[0],STATE_GOAL[1],'*')
plt.plot(STATE_INITIAL[0],STATE_INITIAL[1],'*')
plt.show();
def show_step_number_of_every_episode(self):
number=[];
for i in range(0,len(self.action_total_set)):
number.append(len(self.action_total_set[i]));
plt.plot(number,'-*')
plt.xlabel('number of episodes')
plt.ylabel('number of steps')
plt.show();
# main programming
agent = Agent_class();
for every_loop in range(0,LOOP_EPISODE):
sigma = SIGMA*(LOOP_EPISODE-every_loop)/LOOP_EPISODE;
#sigma = SIGMA;
agent.finish_journey();
agent.show_step();
agent.show_step_number_of_every_episode();
Expected Sarsa

If we select actions in soft-greedy policy and use this policy to update Q, then it will be on-policy expected Sarsa.
If we select actions in non-greedy policy and use greedy policy to update Q, then expected Sarsa will be Q-learning.
Result
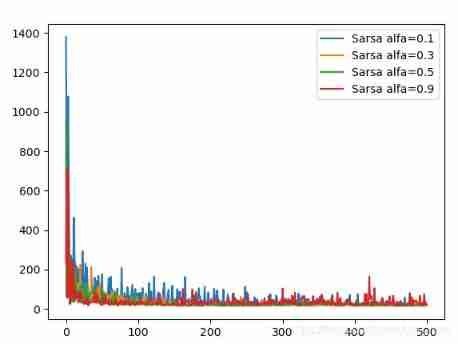
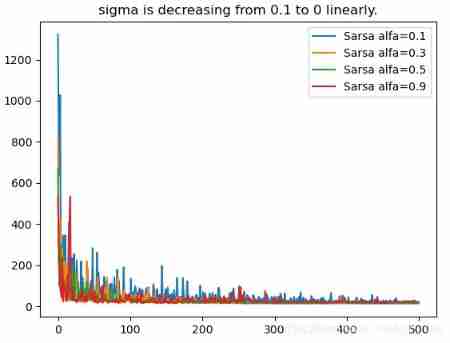
when sigma = 0.1, the influence of differnent alfa in different algorithom:
Sarsa algorithon is not stable when alfa is large such as 0.9. But Q-learning and Expected Sarsa are stable.


Code
## settings
import math
import numpy as np
import random
# visualization
import matplotlib
import matplotlib.pyplot as plt
from matplotlib.ticker import MultipleLocator
# list copy
import copy
# INVARIANTS
#state (x,y)
STATE_INITIAL = (0,3);
STATE_GOAL = (7,3)
WIDTH = 10;
HEIGHT = 7;
# action
LEFT = (-1,0);
RIGHT = (1,0);
UP = (0,1);
DOWN = (0,-1);
ACTION_INTENDED = [LEFT,RIGHT,UP,DOWN];
# policy pi(a|s) which start at random policy, and updated after every iteration (function)
policy_target={}; # policy[(x,y)][action]
dict_actions_policy={};
for action in ACTION_INTENDED:
dict_actions_policy[action]=1/len(ACTION_INTENDED);
for x in range(0,WIDTH):
for y in range(0,HEIGHT):
policy_target[(x,y)] = copy.deepcopy(dict_actions_policy)
# reward: q_s_a(STATE_GOAL)=0, reward in every step is -1.
R = -1;
# special part: windy_effect, which will change the action_intended into action_actual
# there are different influence on different x.
# 1 unit influence will produce additional up in gridworld.
ACTION_WIND_EFFECT = [0,0,0,1,1,1,2,2,1,0];
# parameters we set
# sigma-policy
SIGMA = 0.1;
# number of episode
LOOP_EPISODE = 500;
# discounting parameter
gamma = 1;
# iteration step
ALFA =[ 0.1,0.3,0.5,0.9];
# FUNCTIONS
# FUNCTIONS in policy evaluation
def choose_action(state,policy):
p=[];
index=range(0,len(ACTION_INTENDED));
for action in ACTION_INTENDED:
p.append(policy[state][action]);
action_intended = ACTION_INTENDED[np.random.choice(index,p=p)];
return action_intended;
def choose_max_action(state,Q_s_a):
Q=[];
choice=[];
for action in ACTION_INTENDED:
Q.append(Q_s_a[state][action]);
for i in range(0,len(Q)):
if Q[i]==max(Q):
choice.append(ACTION_INTENDED[i]);
action_max = random.choice(choice);
return action_max;
# actual action taken (update after choice of actions )
def get_actual_action(state,action_intended):
x = action_intended[0]
y = action_intended[1] + ACTION_WIND_EFFECT[ state[0] ];
return ( (x,y) );
# state after the actual action taken
# the agent could not get out of the grid world.
def get_state_next(state,action):
state_next = ( state[0]+action[0], state[1]+action[1] );
x = max(state_next[0],0);
x = min(x,WIDTH-1);
y = max(state_next[1],0);
y = min(y,HEIGHT-1);
return (x,y);
# FUNCTIONS in policy improvement
# update after every iteration and use sigma-policy
def policy_updation(state,Q_s_a,policy):
Q=[];
for action in ACTION_INTENDED:
Q.append(Q_s_a[state][action]);
actions_max = [];
for i in range(0,len(ACTION_INTENDED)):
if Q_s_a[state][ACTION_INTENDED[i]]==max(Q):
actions_max.append(ACTION_INTENDED[i]);
action_max = random.choice(actions_max);
for action in ACTION_INTENDED:
policy[state][action] = sigma/len(ACTION_INTENDED);
policy[state][action_max] += 1 - sigma;
# CLASS
# CLASS Agent
class Agent_class():
def __init__(self):
# q_s_a[state][action] initial value =0;
self.Q_s_a={};
self.policy = copy.deepcopy( policy_target );
dict_q_action={};
for action in ACTION_INTENDED:
dict_q_action[action] = 0;
for x in range(0,WIDTH):
for y in range(0,HEIGHT):
self.Q_s_a[(x,y)] = copy.deepcopy( dict_q_action );
self.action_total_set=[];
self.state_total_set=[];
self.step_number_in_episode={};
# current state
self.current_state = STATE_INITIAL;
# current action
self.current_intended_action = choose_action(self.current_state,self.policy)
self.current_actual_action = get_actual_action(self.current_state,self.current_intended_action);
def finish_journey(self):
# current state
self.current_state = STATE_INITIAL;
# current action
self.current_intended_action = choose_action(self.current_state,self.policy);
self.current_actual_action = get_actual_action(self.current_state,self.current_intended_action);
# state set and action set
action_set=[];
state_set=[];
action_set.append( self.current_intended_action );
state_set.append( self.current_state );
next_state = get_state_next(self.current_state,self.current_actual_action);
while next_state != STATE_GOAL:
# policy evaluation average of every action
Q_temp= (1-alfa)*self.Q_s_a[self.current_state][self.current_intended_action]\
+alfa*R;
for action in ACTION_INTENDED:
Q_temp+= alfa*self.Q_s_a[next_state][action]*self.policy[next_state][action];
self.Q_s_a[self.current_state][self.current_intended_action]=Q_temp;
#policy improvement
policy_updation(self.current_state,self.Q_s_a,self.policy)
# get the next action;
next_action_intended = choose_max_action(next_state,self.Q_s_a);
next_action_actual = get_actual_action(next_state,next_action_intended)
# update current state and action
self.current_intended_action = next_action_intended;
self.current_actual_action = next_action_actual;
self.current_state = next_state;
# append of state set and action set
action_set.append( self.current_intended_action );
state_set.append( self.current_state );
# get next state
next_state = get_state_next(self.current_state,self.current_actual_action);
# update when next state is terminal state
state_set.append(next_state)
self.Q_s_a[self.current_state][self.current_intended_action] = (1-alfa)*\
self.Q_s_a[self.current_state][self.current_intended_action] + alfa* R;
self.action_total_set.append(action_set);
self.state_total_set.append(state_set);
def show_step(self):
x=[];
y=[];
for state in self.state_total_set[-1]:
x.append(state[0]);
y.append(state[1]);
plt.plot(x,y,'->')
plt.plot(STATE_GOAL[0],STATE_GOAL[1],'*')
plt.plot(STATE_INITIAL[0],STATE_INITIAL[1],'*')
plt.show();
def step_number_of_every_episode(self):
number=[];
for i in range(0,len(self.action_total_set)):
number.append(len(self.action_total_set[i]));
self.step_number_in_episode=number;
def show_step_number_of_every_episode(self):
number=[];
for i in range(0,len(self.action_total_set)):
number.append(len(self.action_total_set[i]));
plt.plot(number,'-*')
plt.xlabel('number of episodes')
plt.ylabel('number of steps')
plt.show();
# main programming
number_set =[];
for alfa in ALFA:
agent = Agent_class();
for every_loop in range(0,LOOP_EPISODE):
#sigma = SIGMA*(LOOP_EPISODE-every_loop)/LOOP_EPISODE;
sigma = SIGMA;
agent.finish_journey();
#agent.show_step();
agent.step_number_of_every_episode();
number_set.append(agent.step_number_in_episode);
for i in range(0,len(ALFA)):
plt.plot(number_set[i],label='expected Sarsa '+'alfa='+str(ALFA[i]))
plt.legend();
plt.show();
边栏推荐
- Opencv Harris corner detection
- About windows and layout
- CV learning notes - camera model (Euclidean transformation and affine transformation)
- The 4G module designed by the charging pile obtains NTP time through mqtt based on 4G network
- Emballage automatique et déballage compris? Quel est le principe?
- Leetcode - 895 maximum frequency stack (Design - hash table + priority queue hash table + stack)*
- Basic knowledge of communication interface
- Mobile phones are a kind of MCU, but the hardware it uses is not 51 chip
- Dynamic layout management
- 4G module initialization of charge point design
猜你喜欢
For new students, if you have no contact with single-chip microcomputer, it is recommended to get started with 51 single-chip microcomputer

2.2 DP: Value Iteration & Gambler‘s Problem
LeetCode - 919. 完全二叉树插入器 (数组)

Mobile phones are a kind of MCU, but the hardware it uses is not 51 chip
LeetCode 面试题 17.20. 连续中值(大顶堆+小顶堆)
LeetCode - 673. Number of longest increasing subsequences
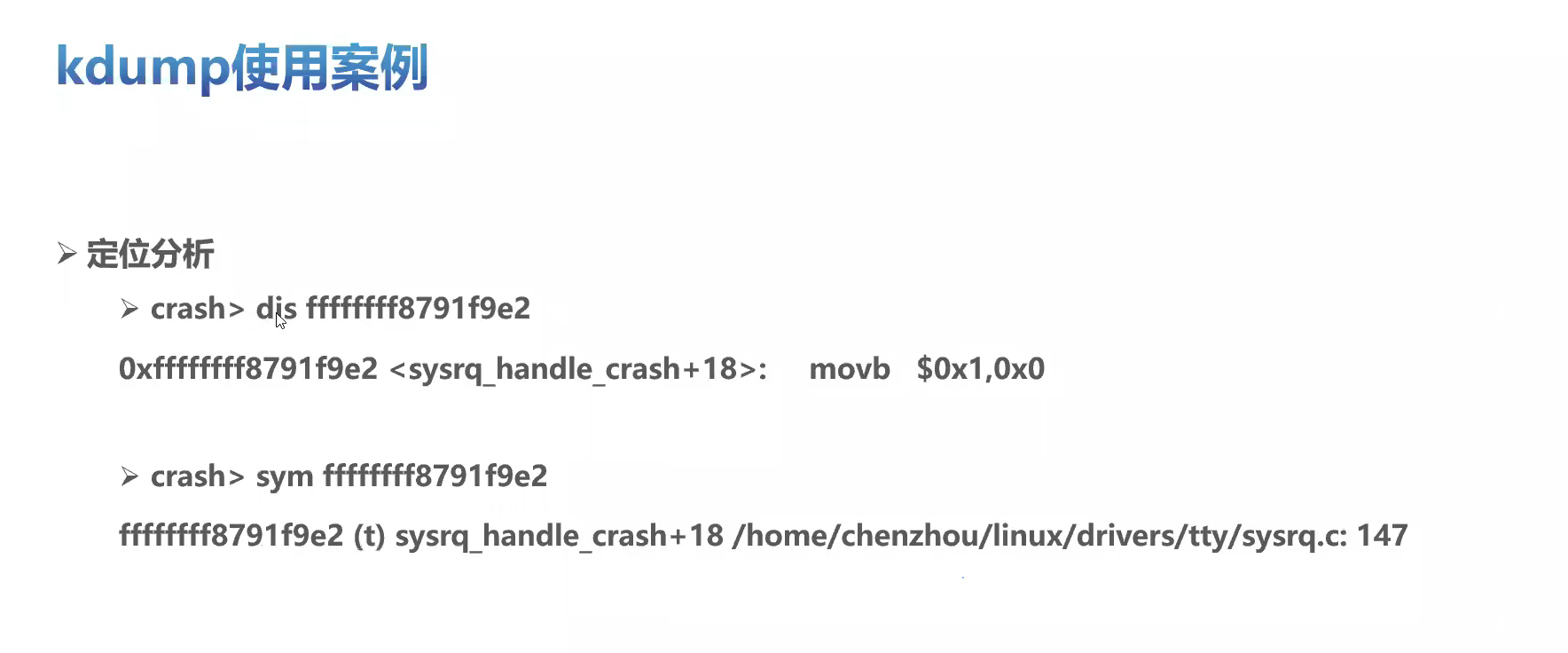
Open Euler Kernel Technology Sharing - Issue 1 - kdump Basic Principles, use and Case Introduction
CV learning notes - deep learning
Leetcode bit operation
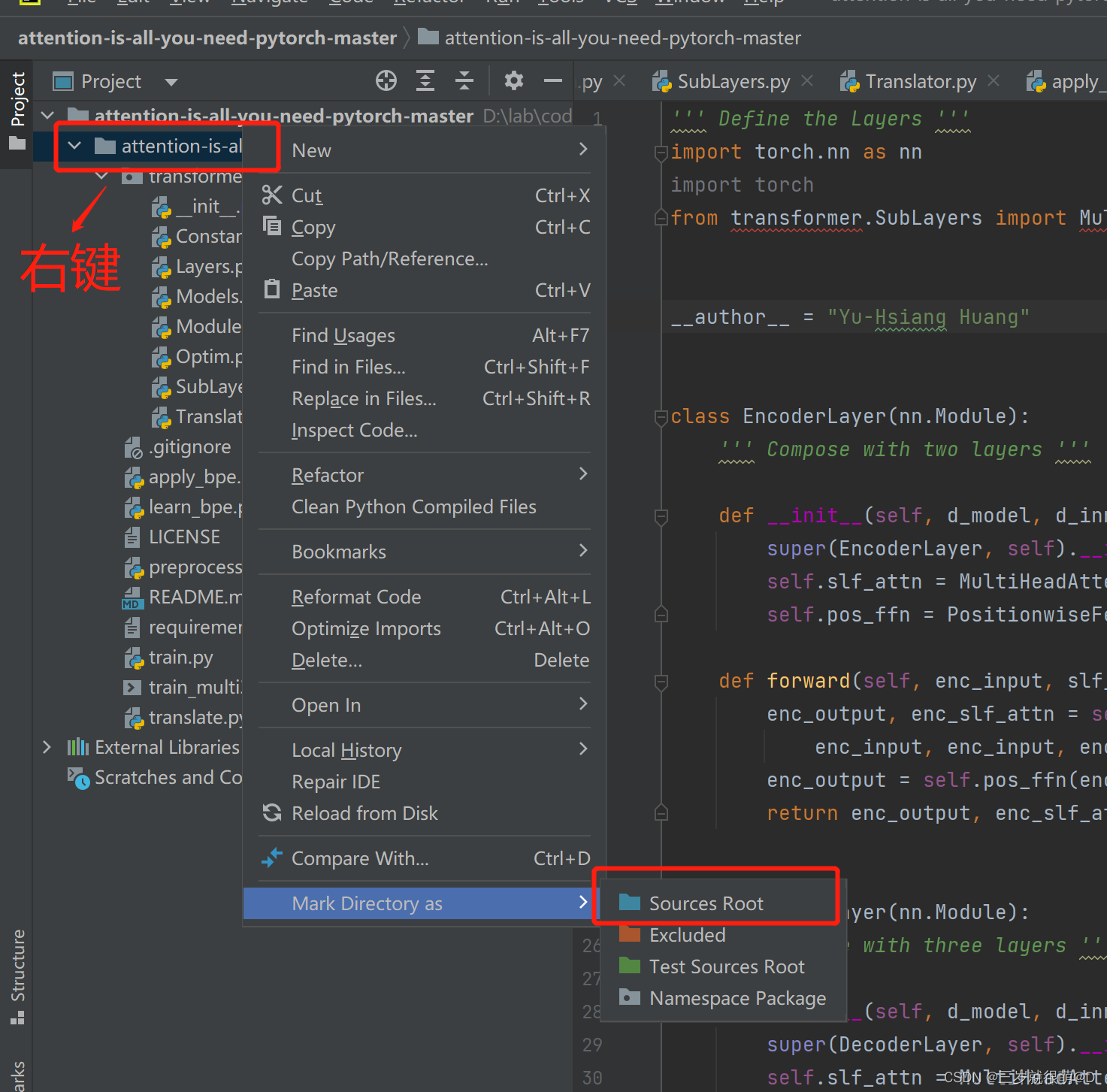
Pycharm cannot import custom package
随机推荐
Tensorflow built-in evaluation
CV learning notes - deep learning
01仿B站项目业务架构
Markdown latex full quantifier and existential quantifier (for all, existential)
CV learning notes - reasoning and training
2021-11-11 standard thread library
3.2 Off-Policy Monte Carlo Methods & case study: Blackjack of off-Policy Evaluation
03 FastJson 解决循环引用
LeetCode - 673. 最长递增子序列的个数
JS foundation - prototype prototype chain and macro task / micro task / event mechanism
Mobile phones are a kind of MCU, but the hardware it uses is not 51 chip
is_ power_ of_ 2 judge whether it is a multiple of 2
01 business structure of imitation station B project
LeetCode - 919. 完全二叉树插入器 (数组)
(2) New methods in the interface
Basic knowledge of communication interface
My notes on intelligent charging pile development (II): overview of system hardware circuit design
Emballage automatique et déballage compris? Quel est le principe?
Cases of OpenCV image enhancement
yocto 技術分享第四期:自定義增加軟件包支持