当前位置:网站首页>Mujoco model learning record
Mujoco model learning record
2022-07-01 18:03:00 【Feisy】
body
1 worldbody special body, As the of the world frame
This element is used to construct the kinematic tree via nesting. The element worldbody is used for the top-level body, while the element body is used for all other bodies. The top-level body is a restricted type of body: it cannot have child elements inertial and joint, and also cannot have any attributes. It corresponds to the origin of the world frame, within which the rest of the kinematic tree is defined. Its body name is automatically defined as “world”.
Cannot configure properties
2 body Realization object of robot connecting rod and joint
2.1 name: string, optional
Name of the body.
mesh and auctor Need to pass through name Associated with a connecting rod or joint
2.2 pos: real(3), optional
The 3D position of the body frame, in local or global coordinates as determined by the coordinate attribute of compiler. Recall the earlier discussion of local and global coordinates in Coordinate frames. In local coordinates, if the body position is left undefined it defaults to (0,0,0). In global coordinates, an undefined body position is inferred by the compiler through the following steps:
If the inertial frame is not defined via the inertial element, it is inferred from the geoms attached to the body. If there are no geoms, the inertial frame remains undefined. This step is applied in both local and global coordinates.
If both the body frame and the inertial frame are undefined, a compile error is generated.
If one of these two frames is defined and the other is not, the defined one is copied into the undefined one. At this point both frames are defined, in global coordinates.
The inertial frame as well as all elements defined in the body are converted to local coordinates, relative to the body frame.
Note that whether a frame is defined or not depends on its pos attribute, which is in the special undefined state by default. Orientation cannot be used to make this determination because it has an internal default (the unit quaternion).
2.3 geom body Appearance properties
This element creates a geom, and attaches it rigidly to the body within which the geom is defined. Multiple geoms can be attached to the same body. At runtime they determine the appearance and collision properties of the body. At compile time they can also determine the inertial properties of the body, depending on the presence of the inertial element and the setting of the inertiafromgeom attribute of compiler. This is done by summing the masses and inertias of all geoms attached to the body with geom group in the range specified by the inertiagrouprange attribute of compiler. The geom masses and inertias are computed using the geom shape, a specified density or a geom mass which implies a density, and the assumption of uniform density.
Geoms are not strictly required for physics simulation. One can create and simulate a model that only has bodies and joints. Such a model can even be visualized, using equivalent inertia boxes to represent bodies. Only contact forces would be missing from such a simulation. We do not recommend using such models, but knowing that this is possible helps clarify the role of bodies and geoms in MuJoCo.
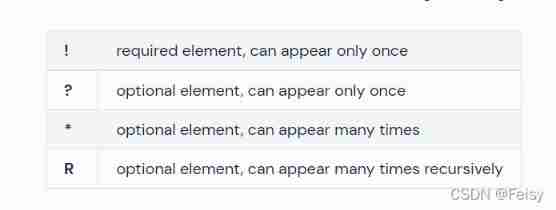
2.3.1 type: [plane, hfield, sphere, capsule, ellipsoid, cylinder, box, mesh], “sphere”
contact (*)
边栏推荐
- Technical secrets of ByteDance data platform: implementation and optimization of complex query based on Clickhouse
- China biodegradable plastics market forecast and investment strategy report (2022 Edition)
- Detailed explanation of select in golang
- Alibaba cloud Li Feifei: China's cloud database has taken the lead in many mainstream technological innovations abroad
- Maizeer: the two batches of products reported by the media have been taken off the shelves and sealed, and consumer appeals are accepted
- 目前炒期货在哪里开户最正规安全?怎么期货开户?
- [beauty detection artifact] come on, please show your unique skill (is this beauty worthy of the audience?)
- Penetration practice vulnhub range Keyring
- Penetration practice vulnhub range Tornado
- Talk about the favorite tools used by project managers
猜你喜欢

Gameframework eating guide
(十六)ADC转换实验
. Net cloud native architect training camp (permission system code implements actionaccess) -- learning notes
Intelligent operation and maintenance practice: banking business process and single transaction tracking
![[Verilog quick start of Niuke network question brushing series] ~ priority encoder circuit ①](/img/24/23f6534e2c74724f9512c5b18661b6.png)
[Verilog quick start of Niuke network question brushing series] ~ priority encoder circuit ①

Length of learning and changing
Roewe rx5's "a little more" product strategy
What are the legal risks of NFT brought by stars such as curry and O'Neill?
![[PHP foundation] realize the connection between PHP and SQL database](/img/eb/c8953eddfe3b19b0adb5529957d275.jpg)
[PHP foundation] realize the connection between PHP and SQL database
Intel's open source deep learning tool library openvino will increase cooperation with local software and hardware parties and continue to open

随机推荐
MySQL -- explain performance optimization
手机开户股票开户安全吗?那么开户需要带些什么?
JS how to convert a string with a delimiter into an n-dimensional array
Is the software of futures pioneer formal and safe? Which futures company is safer to choose?
Fix the problem that easycvr device video cannot be played
L'ouverture d'un compte d'actions en ligne est - elle sécurisée? Fiable?
Replace UUID, nanoid is faster and safer!
Key points on February 15, 2022
Subnet division and summary
徽商期货是正规期货平台吗?在徽商期货开户安全吗?
EasyCVR通过国标GB28181协议接入设备,出现设备自动拉流是什么原因?
Intelligent operation and maintenance practice: banking business process and single transaction tracking
Reflective XSS vulnerability
An example of data analysis of an old swatch and an old hard disk disassembly and assembly combined with the sensor of an electromagnetic press
The new server is packaged with the source code of H5 mall with an operation level value of several thousand
SCP -i private key usage
Extract the compressed package file and retrieve the password
C language implementation of sum of two numbers [easy to understand]
Roewe rx5's "a little more" product strategy
麦趣尔:媒体报道所涉两批次产品已下架封存,受理消费者诉求