当前位置:网站首页>NVIC interrupt priority management
NVIC interrupt priority management
2022-07-07 09:07:00 【A big cat 1201】
author : A big cat 1201
special column :《STM32 Study 》
Maxim : You just try to , Leave the rest to time !

NVIC Interrupt priority management
describe
An interrupt can be regarded as an event .
such as , You are studying at home , Suddenly there was a phone call , You can only stop your current study to answer the phone , Someone knocked at the door while answering the phone , You have to put down the phone and open the door , Then pick up the phone and continue to call , After hanging up the phone, continue the previous study .
In the example above , Learning is an ongoing event , And calling is an interruption , When someone knocks on the door during the phone call, it is another interruption .
STM32 The same is true of interruptions in , During the execution of the main program, other events will interrupt the process , Enter the program in the event to execute , After executing the interrupt program, return to the main program to continue execution , This is interrupt .
🦔 Interrupt type
- CM3 The kernel support 256 A break , Which includes 16 Kernel interrupts and 240 External interrupts , And have 256 The programmable interrupt settings of the .
- STM32F10 Series does not use CM3 Everything about the kernel , It's just a part of it .
- STM32F10 Series have 84 A break , Include 16 Kernel interrupts and 68 Maskable interrupts , have 16 Level programmable interrupt priority .
- STM32F103 Above the series , It's just 60 Maskable interrupts ( stay 107 The series has 68 individual ).
Both external interrupts and maskable interrupts here mean the same , It refers to all interrupts excluding kernel interrupts .
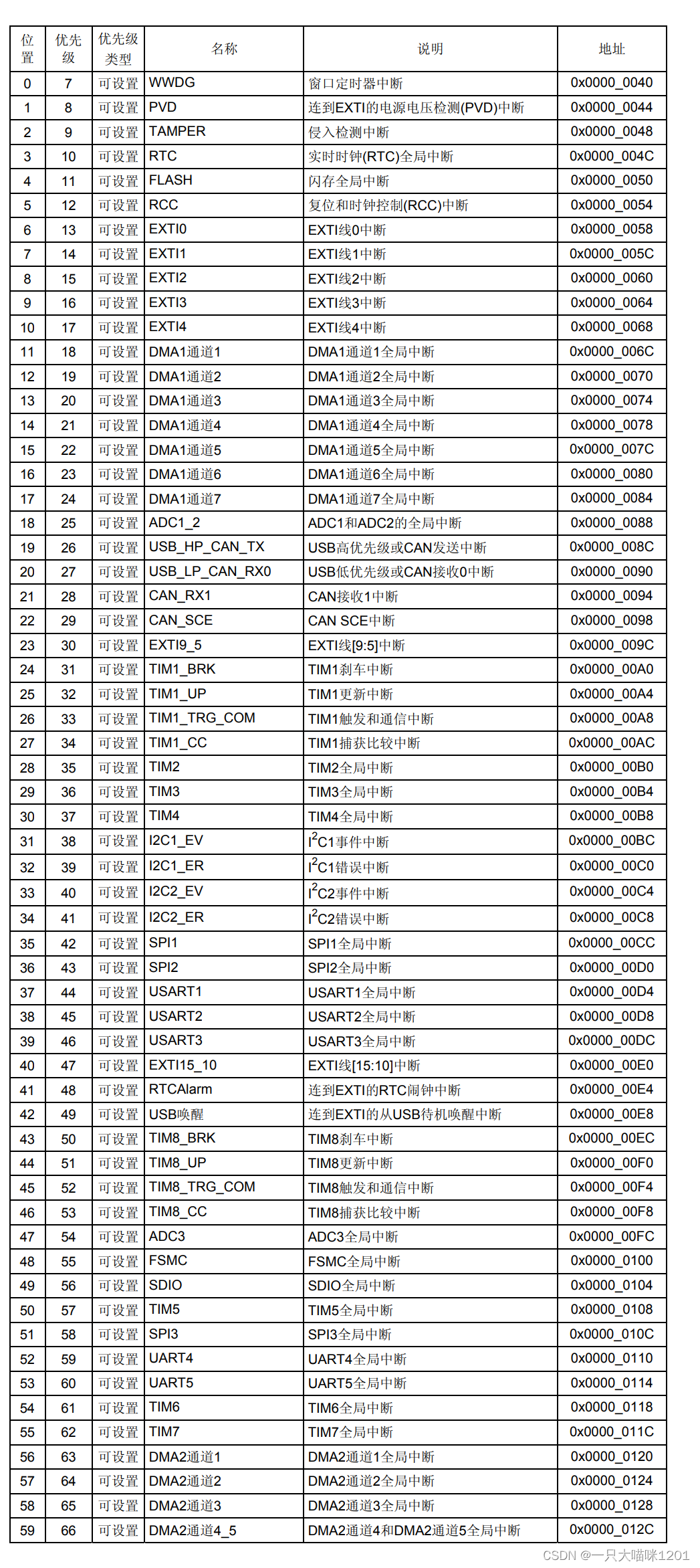
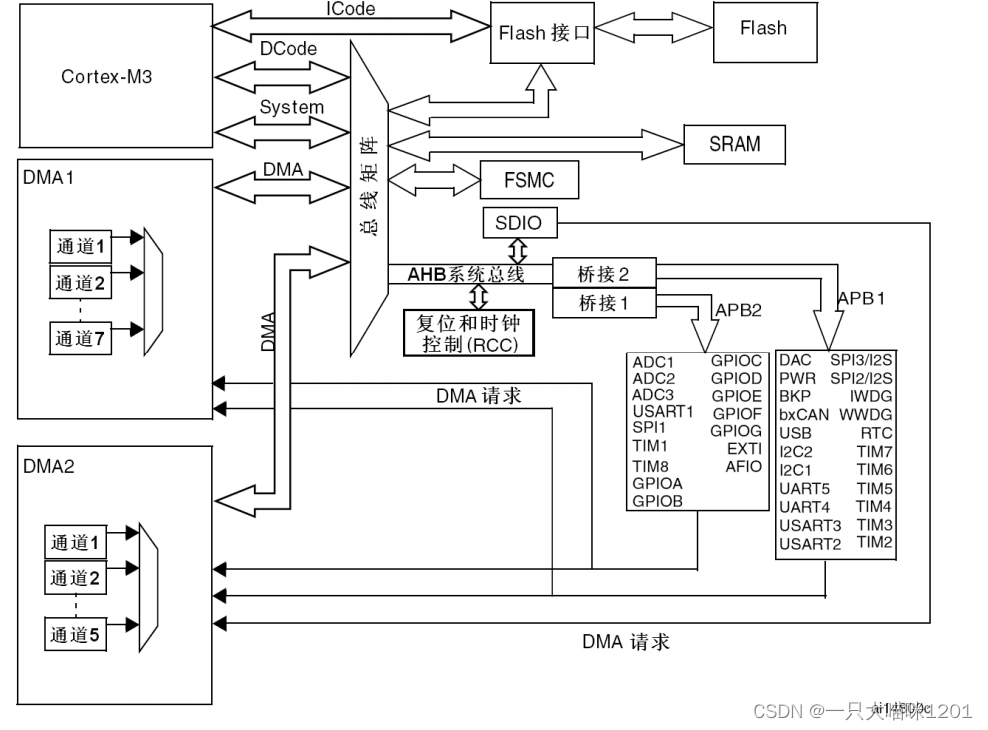
This picture is used by this cat STM32F103ZET6 Of 60 External interrupts .
Interrupt priority grouping
There are so many types of interrupts , How is it managed ?STM32 Manage these interrupts by grouping .
This group is set by SCB->AIRCR The register of bit10~8 To define the .
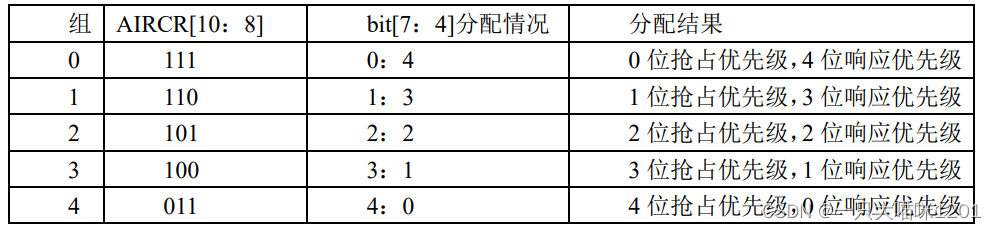
By giving SCB->AIRCR The second in the register 8 Position to the first 10 The value of bit divides these interrupt types into 5 A set of .
In different groups ,AIRCR The... In the register 4 Position to the first 8 Bit management priorities differ .
For example, the commonly used number 2 Group , this 4 Two of the bits manage preemption priority , You two manage the response priority . From left to right .
At this time, I have doubts , What are the preemption priority and response priority ?
🦔 Preemption priority and response priority
preemption :
- Preemptive priority refers to the interrupt priority of interrupts , Interrupts with high preemption priority can interrupt interrupts with low preemption priority .
Response priority
- Response priority refers to the response sequence of interrupts , The response priority is meaningful only if the preemption priority is the same . Seize the same priority , Two interrupts occur at the same time , Respond to interrupts with high priority first .
Of the two priorities , The smaller the number, the higher the priority .
Illustrate with examples :
- Suppose the interrupt priority group is set to 2
- Then set the
- interrupt 3(RTC interrupt ) The preemption priority of is 2, The response priority is 1.
- interrupt 6( External interrupt 0) The preemption priority of is 3, The response priority is 0.
- interrupt 7( External interrupt 1) The preemption priority of is 2, The response priority is 0.
Then the priority order of these three interrupts is
- interrupt 7> interrupt 3> interrupt 6
When the preemption priority and response priority are the same , Which interrupt occurs first, execute which interrupt program first .
Be careful :
Interrupt grouping is set only once after the initialization of the system . If there is any modification in the later program, the grouping will be chaotic .
For example, when using 2 Group time 
The priority management bit is set as shown in the figure above , The preemption priority at this time is 2, The response priority is 2.
After using this group, set the group to 3 Group time , At this time, the preemption priority is 5, The response priority is 0.
In this way , Priority management is chaotic .
🦔 Interrupt priority grouping function
ST The official library function for setting groups , We don't need to set the value of registers one by one .
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)
{
/* Check the parameters */
assert_param(IS_NVIC_PRIORITY_GROUP(NVIC_PriorityGroup));
/* Set the PRIGROUP[10:8] bits according to NVIC_PriorityGroup value */
SCB->AIRCR = AIRCR_VECTKEY_MASK | NVIC_PriorityGroup;
}
This is a function of interrupt priority grouping , He was in ST Official firmware library misc.c In the source file .
From the definition of the function, we can see , Its essence is to configure AIRCR register .
#define NVIC_PriorityGroup_0 ((uint32_t)0x700) /*!< 0 bits for pre-emption priority 4 bits for subpriority */
#define NVIC_PriorityGroup_1 ((uint32_t)0x600) /*!< 1 bits for pre-emption priority 3 bits for subpriority */
#define NVIC_PriorityGroup_2 ((uint32_t)0x500) /*!< 2 bits for pre-emption priority 2 bits for subpriority */
#define NVIC_PriorityGroup_3 ((uint32_t)0x400) /*!< 3 bits for pre-emption priority 1 bits for subpriority */
#define NVIC_PriorityGroup_4 ((uint32_t)0x300) /*!< 4 bits for pre-emption priority 0 bits for subpriority */
above 5 A macro definition is the entry parameter of the interrupt priority grouping function , You can pass the corresponding parameters into the function in which group you need to be divided .
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_3);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
So this 60 External interrupts are grouped .
Interrupt priority setting
Although they are divided into groups , Convenient for management , But exactly which interrupt occurred , Its priority needs to be set in detail .
🦔 Interrupt priority setting register
typedef struct
{
__IO uint32_t ISER[8]; /*!< Offset: 0x000 Interrupt Set Enable Register */
uint32_t RESERVED0[24];
__IO uint32_t ICER[8]; /*!< Offset: 0x080 Interrupt Clear Enable Register */
uint32_t RSERVED1[24];
__IO uint32_t ISPR[8]; /*!< Offset: 0x100 Interrupt Set Pending Register */
uint32_t RESERVED2[24];
__IO uint32_t ICPR[8]; /*!< Offset: 0x180 Interrupt Clear Pending Register */
uint32_t RESERVED3[24];
__IO uint32_t IABR[8]; /*!< Offset: 0x200 Interrupt Active bit Register */
uint32_t RESERVED4[56];
__IO uint8_t IP[240]; /*!< Offset: 0x300 Interrupt Priority Register (8Bit wide) */
uint32_t RESERVED5[644];
__O uint32_t STIR; /*!< Offset: 0xE00 Software Trigger Interrupt Register */
} NVIC_Type;
stay ST In the official firmware library misc.h Such a structure is defined in , The register of the structure is used to set the priority of interrupts .
- ISER[8]:ISER The full name is :Interrupt Set-Enable Registers, This is an interrupt enable register set .STM32F103 The only maskable interrupts are 60 individual , So for us , What works is two (ISER[0] and ISER[1]), All in all, it means 64 A break . and STM32F103 Only the first of them 60 position .ISER[0] Of bit 0 To 31 Corresponding interrupt 0 To 31.ISER[1] Of bit 0 To 27 Corresponding interrupt 32~59; So the total is 60 Each interrupt corresponds to . You have to enable some interruption , You have to set the corresponding ISER Position as 1.
- ICER[8]: The full name is :Interrupt Clear-Enable Registers, It's an interrupt division register set . The register set is similar to ISER It's just the opposite , Is used to clear an interrupt enable . Here we need to set up a special ICER To clear the middle break , Not to ISER Write 0 To get rid of , Because NVIC All of these registers write 1 Effective , Write 0 It's invalid .
- ISPR[8]: The full name is :Interrupt Set-Pending Registers, Is an interrupt pending control register set . The interrupt corresponding to each bit and ISER It's the same . Through setting 1, You can suspend an in progress interrupt , And execute the same level or higher level interrupt . Write 0 It's invalid .
- ICPR[8]: The full name is :Interrupt Clear-Pending Registers, Is an interrupt decoupling control register set . Its function and ISPR contrary , The corresponding bit is also the same as ISER It's the same . By setting 1, You can hook a pending interrupt . Write 0 Invalid .
- IABR[8]: The full name is :Interrupt Active Bit Registers, Is a set of interrupt activated flag registers . The interrupt represented by the corresponding bit and ISER equally , If 1, Indicates that the interrupt corresponding to the bit is being executed . This is a read-only register , It can be used to know which interrupt is currently being executed . After the interrupt is executed, it is automatically reset by hardware .
- IP[240]: The full name is :Interrupt Priority Registers, Is an interrupt priority controlled register set . This register set is quite important STM32 The interrupt group of is closely related to this register group .STM32F103 Only the first of them 60 individual .IP[59] To IP[0] They correspond to interrupts respectively 59~0. And each block interrupt occupied by 8bit Not all use , It's just high 4 position . this 4 position , It is divided into preemption priority and response priority . Preemption comes first , Response priority comes after . And these two priorities occupy several bits, but also according to SCB->AIRCR The interrupt group setting in the .
stay ST Official firmware library core_cm3.h There are several library functions in
static __INLINE void NVIC_SetPendingIRQ(IRQn_Type IRQn);
static __INLINE uint32_t NVIC_GetPendingIRQ(IRQn_Type IRQn);
static __INLINE void NVIC_ClearPendingIRQ(IRQn_Type IRQn);
The function of separation is to suspend an interrupt , Read an interrupt state , Release a suspended interrupt .
🦔 Interrupt priority initialization function
ST The official also provides the setting function of interrupt priority , We don't need to set registers one by one .
typedef struct
{
uint8_t NVIC_IRQChannel; // Set interrupt channel
uint8_t NVIC_IRQChannelPreemptionPriority;// Set preemption priority
uint8_t NVIC_IRQChannelSubPriority; // Set response priority
FunctionalState NVIC_IRQChannelCmd; // Can make / Can make
} NVIC_InitTypeDef;
stay misc.h Such a structure is defined in , Member variables represent
- Interrupt channel , That is, which type of interrupt .
- preemption .
- Response priority .
- Interrupt enable .
And use this structure and GPIO The method of using is similar to
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;// A serial port 1 interrupt
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;// Preemption priority is 1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;// Sub priority bit 2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ Channel enable
NVIC_Init(&NVIC_InitStructure); // Initialize... According to the parameters specified above NVIC register
The above completes the initialization of interrupt priority .
summary
When using interrupts
After the system is running, set the interrupt priority group first .
Call function :void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup); During the execution of the whole system , Set interrupt packet only once .For each interrupt , Set the corresponding preemption priority and response priority .
Call function :void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct); If you need to suspend / Jie hang , View the current activation status of the interrupt , Call related functions respectively .
边栏推荐
- systemd
- Port occupation troubleshooting
- 【ChaosBlade:根据标签删除POD、Pod 域名访问异常场景、Pod 文件系统 I/O 故障场景】
- LeetCode 715. Range module
- Original collection of hardware bear (updated on June 2022)
- 年薪50w阿里P8亲自下场,教你如何从测试进阶
- 【istio简介、架构、组件】
- Serial port experiment - simple data sending and receiving
- MySQL master-slave delay solution
- Explain Huawei's application market in detail, and gradually reduce 32-bit package applications and strategies in 2022
猜你喜欢
How to pass the PMP Exam in a short time?
JVM 内存结构 详细学习笔记(一)

Platformization, a fulcrum of strong chain complementing chain
PMP Exam details after the release of the new exam outline
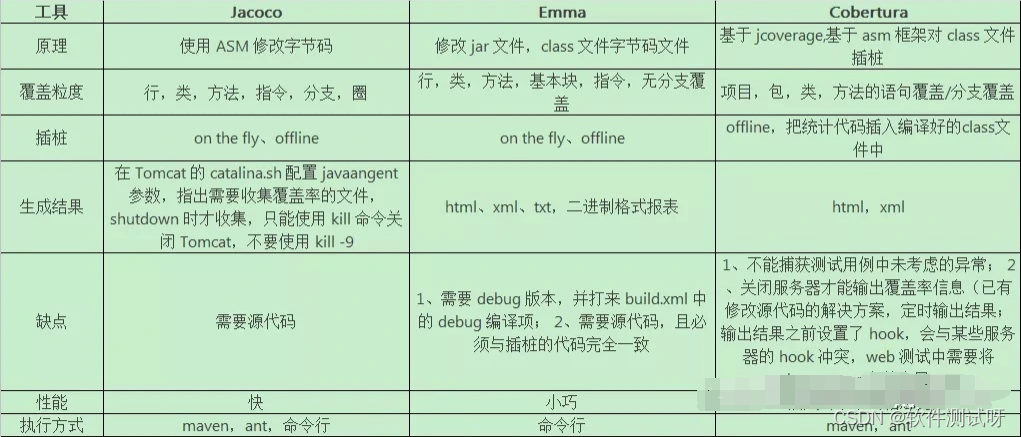
阿里p8推荐,测试覆盖率工具—Jacoco,实用性极佳
C语言指针(上篇)

Hard core sharing: a common toolkit for hardware engineers
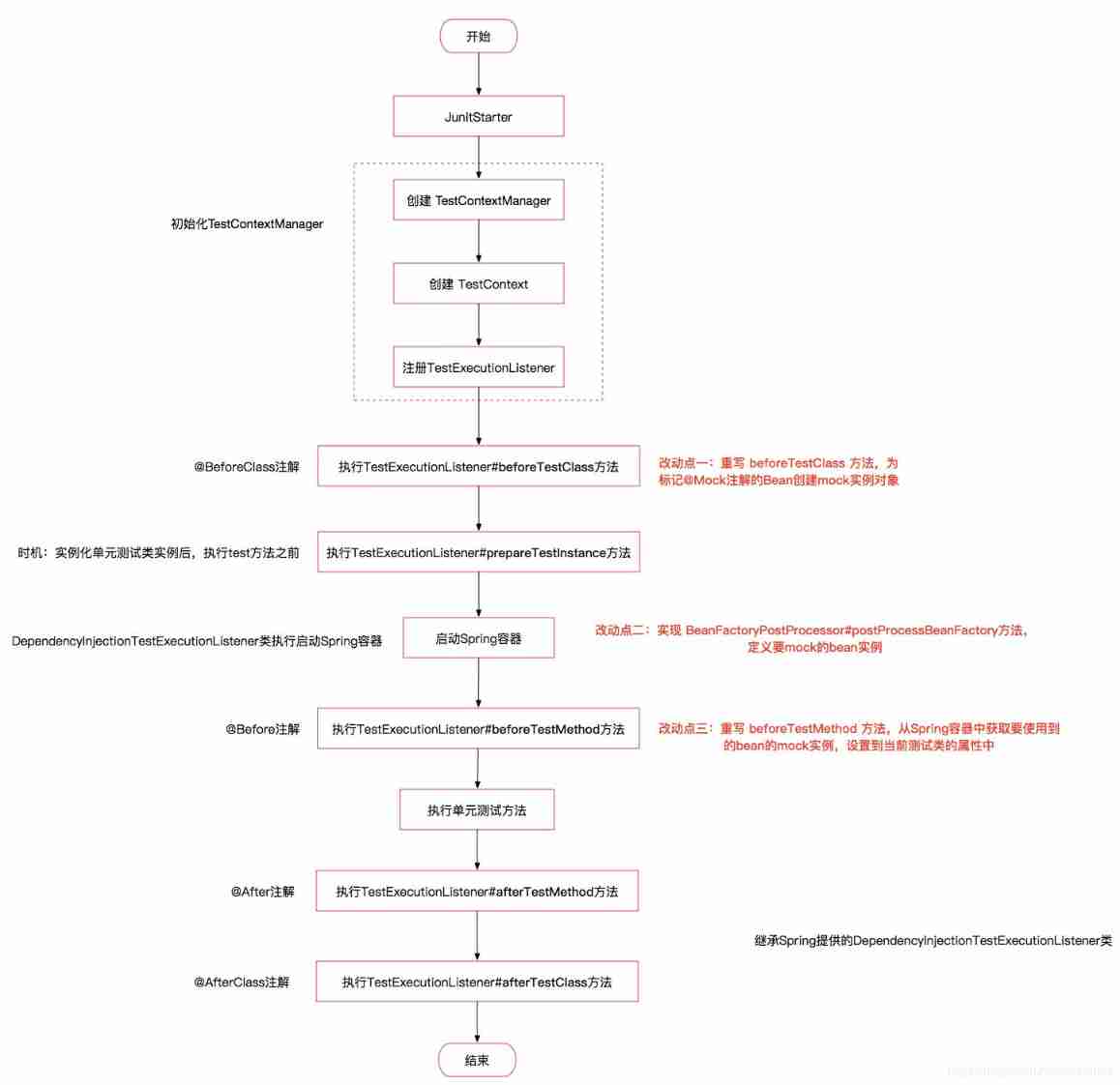
Two schemes of unit test
寄存器地址名映射

面试题:高速PCB一般布局、布线原则
随机推荐
How to pass the PMP Exam in a short time?
JVM garbage collection detailed learning notes (II)
Calf problem
PMP Exam Preparation experience systematically improve project management knowledge through learning
模拟卷Leetcode【普通】1705. 吃苹果的最大数目
Platformization, a fulcrum of strong chain complementing chain
模拟卷Leetcode【普通】1706. 球会落何处
Original collection of hardware bear (updated on June 2022)
模拟卷Leetcode【普通】1609. 奇偶树
2021 year end summary
C language for calculating the product of two matrices
Lenovo hybrid cloud Lenovo xcloud: 4 major product lines +it service portal
LeetCode 715. Range 模块
C语言指针(特别篇)
年薪50w阿里P8亲自下场,教你如何从测试进阶
[chaosblade: node disk filling, killing the specified process on the node, suspending the specified process on the node]
Systick滴答定时器
数字三角形模型 AcWing 1027. 方格取数
Tronapi wave field interface - source code without encryption - can be opened twice - interface document attached - package based on thinkphp5 - detailed guidance of the author - July 6, 2022 - Novice
Analysis of Hessian serialization principle