当前位置:网站首页>PRIMAL: Pathfinding via Reinforcement and Imitation Multi-Agent Learning 代码解析
PRIMAL: Pathfinding via Reinforcement and Imitation Multi-Agent Learning 代码解析
2022-08-04 21:00:00 【strawberry47】
目录
论文名称:PRIMAL: Pathfinding via Reinforcement and Imitation Multi-Agent Learning
论文地址:https://arxiv.org/abs/1809.03531
代码地址:https://github.com/gsartoretti/PRIMAL
相关链接:无人驾驶动态避障策略调研 | 机器人动态避障策略 | 行人轨迹预测 | 机器人导航,三篇强化学习用于多智能体路径规划的论文
1. 准备工作
1.1 配置环境:
- 先新建一个环境:
conda create --name PRIMAL python=3.6 - 新建一个
requirements.txt文件,把要安装的包都放进去,再运行pip install -r requirements安装包:
Cython==0.28.4
gym==0.9.4
Tensorflow==1.13.0
numpy==1.16.0
matplotlib
imageio
tk
networkx
注:源代码中是python3.4 + tf 1.3 + numpy 1.13,但是因为我的pycharm版本较高,不能兼容低版本python,因此我配的是python 3.6;py3.6无法兼容1.3版本的tensorflow,因此我又换成了1.13版本的tf。
3. 如果安装失败,也可以一个一个安装(我采用的方法)
注:直接pip或者conda安装不了gym时,可以尝试以下两种方法:conda install -c conda-forge gym=0.9.4 或者 pip install gym -i https://pypi.tuna.tsinghua.edu.cn/simple
安装tensorflow出问题时,可以执行以下两句 conda install cudatoolkit=10.0conda install tensorflow==1.13.1
4. 安装完成后,可以使用conda list命令检查是否都安装上了:
1.2 调试代码
安装
readme文件中的步骤一步一步来:
① 命令行窗口进入cd od_mstar3文件夹,python setup.py build_ext --inplace;报错了error: Unable to find vcvarsall.bat
网上搜了一下,发现是需要安装Visual Studio,并且在安装时需要勾选 C++组件。如果安装时没有勾选,应当在工具栏中重新安装,之后重启就有vcvarsall模块了。参考文章:已安装vs2017 仍然报错Unable to find vcvarsall.bat然而,装了之后还是报错 o(╥﹏╥)o,参照:关于error: Unable to find vcvarsall.bat,我将
msvc9compiler.py文件中的find_vcvarsall函数return改成return r"C:\Program Files (x86)\Microsoft Visual Studio\2017\Community\VC\Auxiliary\Build\vcvarsall.bat"
其他参考文章:Unable to find vcvarsall.bat?改好
vcvarsall.bat的bug后,又有了一个新bug:fatal error C1083: 无法打开包括文件: “boost/graph/graph_traits.hpp”: No such file or directory。 网上查了一下,这是C++里的BGL库,需要自己下载安装。寻路时会用到它。Boost C++ Libraries 编译安装,oost下载安装编译配置使用指南(含Windows和Linux)
① 在官网中下载了boost_1_53_.zip,解压运行bootstrap.bat的时候报错了 boost 编译时出错处理:Failed to build Boost.Build engine。查阅了很多资料,还是没解决,于是决定下载最新版本的boost工具包。
安装时再次报错,fatal error C1083: 无法打开包括文件: “corecrt.h,Windows 原生 cmd 窗口下编译 C++(cl命令)出现的问题及解决方法② 朋友安装的Visual Studio 2022,能够顺利装上boost,因此我也重新安装了vs2022。啊!终于可以啦!!
1.3 linux环境安装boost:
!!!!linux环境直接使用sudo apt-get install boost命令就可以安装了! https://stackoverflow.com/questions/12578499/how-to-install-boost-on-ubuntu
2.代码解析:
2.1 setup.py
按照作者的要求,应该先运行这个文件~setup.py是调用cpython,用 Python 的语法混合编写 Python 和 C/C++ 代码,提升 Python 速度
调用 C/C++ 代码 教程,Cython 基本用法 。
本代码中是运行cpython_od_matar.pyx这个文件,其中的find_path(world, init_pos, goals, inflation, time_limit)函数是使用ODrM算法进行探索。ODrM相当于专家,generate a high-quality paths。
输入输出:
world - matrix specifying obstacles, 1 for obstacle, 0 for free
init_pos - [[x, y], ...] specifying start position for each robot
goals - [[x, y], ...] specifying goal position for each robot
inflation - inflation factor for heuristic
time_limit - time until failure in seconds
returns:
[[[x1, y1], ...], [[x2, y2], ...], ...] path in the joint
configuration space
2.2 A3C_RNN.py
因为pycharm在服务器运行jupyter文件有点麻烦,我将DRLMAPF_A3C_RNN.ipynb文件改成了A3C_RNN.py文件。这部分负责训练模型
2.3 ACNet.py
ACNet.py中的_build_net()函数对应着论文中的网络结构: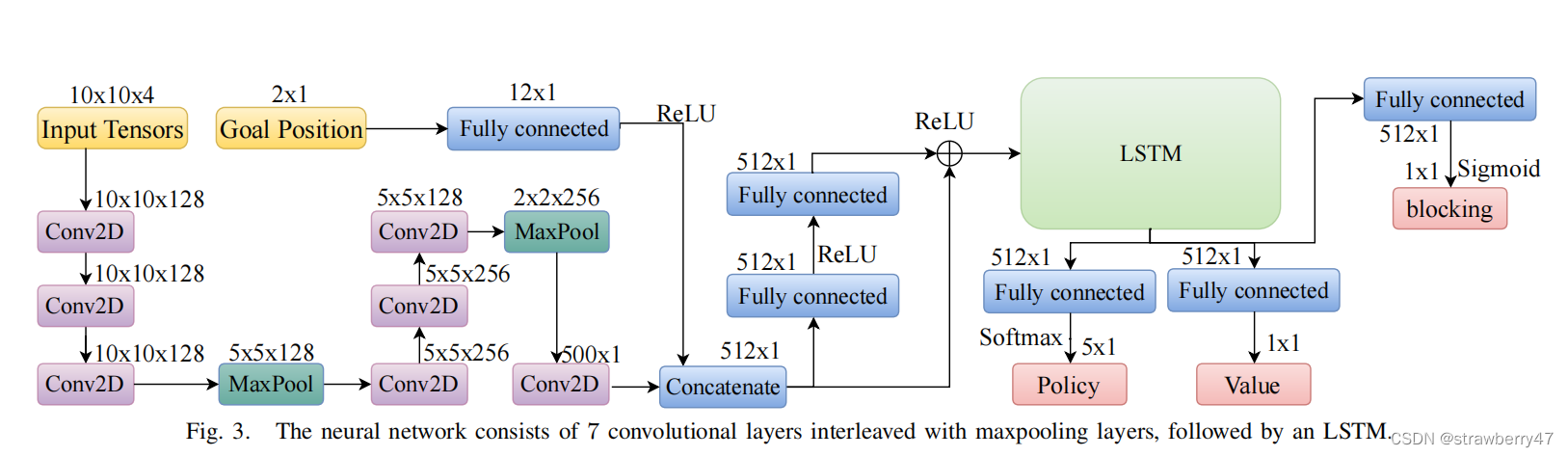
2.4 mapf_gym环境
2.4.1 mapf_gym与mapf_gym_cap区别
继承了gym库,用于搭建环境
奇怪的是,它与mapf_gym_cap.py中代码几乎一样,只是_observe()函数不太一样:mapf_gym中限制了mag(agent距离goal的位置)的大小,应该就是视野受限吧:
github中对这两个文件的解释是:mapf_gym:Multi-agent path planning gym environment, in which agents learn collective path planningmapf_gym_cap.py:Multi-agent path planning gym environment, with capped goal distance state value for validation in larger environments
看了一下代码,训练的时候调用的是mapf_gym,测试的时候是mapf_gym_cap.py
直接运行这两个代码会报错NameError: name 'coordinationRatio' is not defined,没查到coordinationRatio这个函数是干什么的,我就把对应的代码print(coordinationRatio(env))注释掉了。
2.4.2 搭建环境
A3C_RNN.py中创建环境:gym=mapf_gym.MAPFEnv(num_agents=n, world0=world[0],goals0=world[1])
2.5 mapgenerator.py
利用tk()库,生成环境,即手动设置obstacle,agent的位置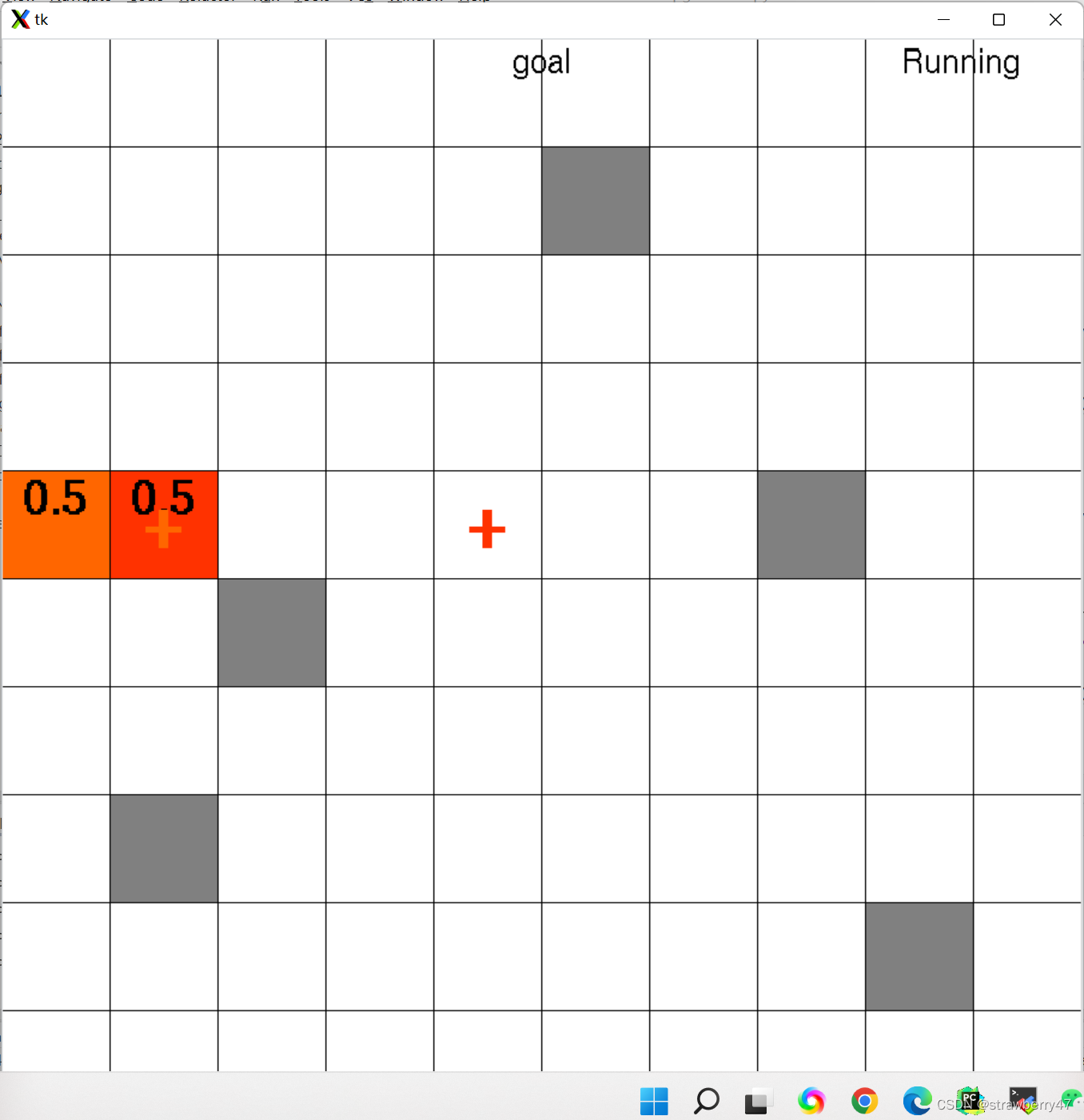
2.6 primal_testing.py
加载模型,进行测试,报错[Errno 2] No such file or directory: 'saved_environments/4_agents_10_size_0_density_id_0_environment.npy',没找到哪里会生成这个文件呀。
2.7 unittest
报错:pyglet.canvas.xlib.NoSuchDisplayException: Cannot connect to "None",网上说直接在终端跑就行了
But,在终端跑,也报错your graphic drives do not support OpenGL 2.0,网上查了一下,得有GPU才行。
① 试试这个方法:用虚拟形式的图像渲染方式在server端启动虚拟化的图形渲染;没有用。。。
② 再试试这个pyglet.canvas.xlib.NoSuchDisplayException: Cannot connect to “None” ,装了一半发现也需要GPU才行
重新看了看代码,发现作者一开始是注释掉了from gym.envs.classic_control import rendering 这个包,于是我也注释掉了。。。 可是注释掉之后,就看不见图形化界面了啊。
GroupLock.py
负责多线程:
Python多线程编程(一):threading 模块 Thread 类的用法详解
Python 多线程编程(二):threading 模块中 Lock 类的用法详解
【python】详解threading模块:Condition类的使用(三)
3.报错合集:
- 报错 Connection to Python debugger failed: Socket operation on nonsocket: configureBlocking
ImportError: DLL load failed: 找不到指定的模块。解决办法:重新安装numpy和tensorflow- 运行
mapgenerator.py代码时报错:TclError: no display name and no $DISPLAY environment variable,解决办法 手动指定显示设备: ① 终端输入printenv grep DISPLAY,查看版本,我这边输出是localhost:10.0;② 再将root = Tk()改成root = Tk(screenName = ':10.0')③ import的部分加上import matplotlib,matplotlib.use('Agg')
边栏推荐
- win10 uwp modify picture quality compress picture
- 2、字符集-编码-解码
- How to understand the crawler's Scrapy framework in the simplest and most popular way?
- 构建Buildroot根文件系统(I.MX6ULL)
- 【AGC】构建服务1-云函数示例
- 推荐系统_刘老师
- Cryptography Series: PEM and PKCS7, PKCS8, PKCS12
- 数字IC设计中基本运算的粗略的延时估计
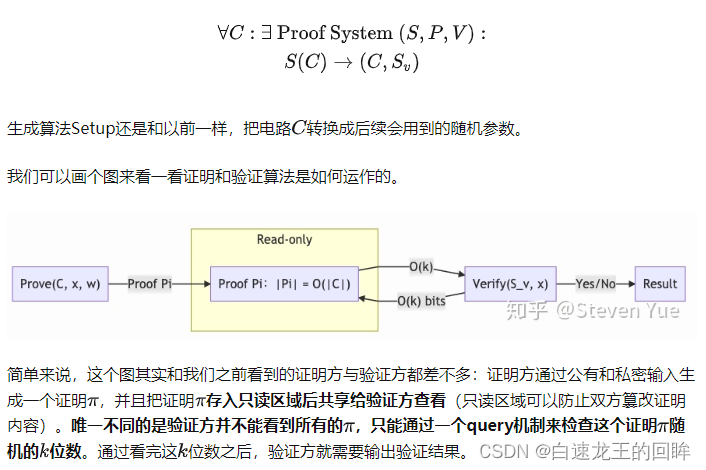
- Zero-knowledge proof - zkSNARK proof system
- 3. Byte stream and character stream of IO stream
猜你喜欢






随机推荐
[2022 Hangzhou Electric Power Multi-School 5 1012 Questions Buy Figurines] Application of STL
win10 uwp 修改图片质量压缩图片
STP基本配置及802.1D生成树协议的改进
Qt Designer生成的图形可以自适应窗口的大小变化
三种方式设置特定设备UWP XAML view
【学术相关】清华教授发文劝退读博:我见过太多博士生精神崩溃、心态失衡、身体垮掉、一事无成!...
伺服电机矢量控制原理与仿真(1)控制系统的建立
PowerCLi 批量配置NTP
[TypeScript] In-depth study of TypeScript enumeration
推荐系统_刘老师
QT(41)-多线程-QTThread-同步QSemaphore-互斥QMutex
文章复现:超分辨率网络-VDSR
JWT主动校验Token是否过期
动态规划_双数组字符串
mdk5.14无法烧录
在vs code中进行本地调试和开启本地服务器
LINQ to SQL (Group By/Having/Count/Sum/Min/Max/Avg操作符)
About the state transfer problem of SAP e-commerce cloud Spartacus UI SSR
[Teach you to use the serial port idle interrupt of the STM32HAL library]
后缀式的计算