当前位置:网站首页>[rapid environment construction] openharmony 10 minute tutorial (cub pie)
[rapid environment construction] openharmony 10 minute tutorial (cub pie)
2022-07-06 17:37:00 【Moon Dream Studio】
BearPi-HM Nano Ten minute tutorial
One 、 preparation
- Prepare a computer :
- No specific requirements , Just for home use ,Windows System
Two 、 Start the download
Download the official image
- Download address ( Baidu cloud ): Baidu SkyDrive Please enter the extraction code Extraction code :eusr
download HiBurn
- Download address ( Baidu cloud ): Baidu SkyDrive Please enter the extraction code Extraction code :1234
Download and install the virtual machine VMware Workstation
- Download address :Download VMware Workstation Player | VMware
Download and install MobaXterm Tools
- Download address :Download MobaXterm 21.5 - free - latest version
Download and install RaiDrive Tools
- Download address :https://forspeed.rbread05.cn/down/newdown/5/28/RaiDrive.rar
Download and install the development board USB drive
- Download address : Search for ch340g - Nanjing qinheng Microelectronics Co., Ltd
Download and install VS Code
- Download address :https://code.visualstudio.com
3、 ... and 、 Start deploying environment
- Unzip Baidu cloud download HarmonyOS
Ubuntu18.4 Mirror image OVF.zipFile to a directory .

- open VMware Workstation Tools

- Select the first 1 Step decompressed
Ubuntu18.4 Mirror image OVFIn the folder , Click onopen

- Import image to local disk ( Select a disk space size ≥ 10G Disk ), Click on
Import.

- Click on
Turn on this virtual machine, To power on the virtual machine

- At this point, the virtual machine enters the login interface , Click on
HarmonyOS

- Input password :bearpi, And then click
Sign in

- After entering the desktop , Click on the blank space on the desktop
Right click, Click onOpen the terminal (E)

- Input in the terminal
ifconfig, Then click enter , exceptloOutside , The other is your network card information , Record what you get IP Address .

To minimize the VMware Workstation, go back to Windows Desktop .
additional : If you can't connect to the network ( If the host network needs to dial up , Such as
Campus network、ADSL dialetc. )stay VMware Workstation in , Click on
virtual machine>>Set up

Then in the network adapter , Change to `NAT Pattern `, Click on ` determine `

Then reply ` step 8`.
Four 、 stay Windows On the remote connection server
- open
MobaXtermTools , And click :Session,SSHButton .

- Enter the connection information , Remote address , And click the OK

- Enter account :
bearpi, Click enter

- Input password :
bearpi, Be careful , When entering the password, the screen will not show , Clickenter

- On the pop-up screen , Click on
YesSave account information , To avoid entering

5、 ... and 、 hold ubuntu Remote mapping of files to Windows On
install RaiDrive Software
The default installation is enough .
Switch to Chinese

Add link information
- SFTP://______ ( This input 3、 ... and .9 Obtained address )
- Account : Both account and password are bearpi
- Other default
- Click on
determine

- View locally mapped ubuntu File path

6、 ... and 、 stay ubuntu Access to the source code
Mouse focus moved to MobaXterm
stay MobaXterm Input in :
cd /home/bearpiAnd then go back
stay MobaXterm Input in :
mkdir project && cd projectAnd then go back
stay MobaXterm Input in :
hpm init -t defaultAnd then go back
stay MobaXterm Input in :
hpm i @bearpi/bearpi_hm_nanoAnd then go back , wait for 1-3 minute ( According to different network speeds )
When... Appears on the screen
Installed.It means that the code acquisition is complete
7、 ... and 、 Compile code
stay MobaXterm Input in :
hpm distAnd then go back , Wait until the screen appears :
BUILD SUCCESSword , The compilation is successful .View the location of the compiled firmware
When compiled , stay Windows You can directly view the final compiled firmware in , The specific path is :

* Be careful , The first disk is `RaiDrive` The path of the mapping .
- 8、 ... and 、 Connect the development board
adopt TypeC cable , Connect the computer with BearPi-HM Nano Connect .
install CH340 drive .
Download address : Search for ch340g - Nanjing qinheng Microelectronics Co., Ltd
Turn off virtual machine capture USB function .( There are many developers because virtual machines capture USB equipment , Cause the machine to Windows The computer can't see the serial port )

If the above operation does not work , Direct closure VMware Workstation, Select suspend , And then plug it in and out again USB.
- View the serial port of the development board

Nine 、 Download program
- stay Windows open Hiburn Tools , And click the
Refresh, stayCOMChoose fromThe eighth -4What you see COM Number

And then click `Setting`, And select `Com settings`,
- stay Com settings Set in
Baudby :921600, Click ok

- Click on Hiburn Tools
Select fileButton , In the pop-up file box , choice7、 ... and -2The corresponding path in , And select :Hi3861_wifiiot_app_allinone.binfile .

Click on
Auto burnCheck box , And then clickConnect
hereConnectThe button becomesDisconnect, Waiting for downloadReset the development board
RESETKey , Start downloading the program



Until it appears
Execution Successfulword , Program download complete .After downloading , Click on
DisconnectButton , It is convenient for later commissioning .
Ten 、MobaXterm View the serial port print log
open MobaXterm,
Click on :
Session、SerialButtonSet up Seral port by Hiburn Same serial port
Set up Speed by
115200Click on
OK

If it shows Unable to open… Etc , Need to see Hiburn Whether the link status of is closed ( Nine -7) step .
Reset the development board , here COM Print out the corresponding log information

11、 ... and 、 Contact us ( More source code )

The copyright belongs to the author and HarmonyOS The technology community is jointly owned , If you want to reprint , Please indicate the source , Otherwise, the legal liability will be investigated
边栏推荐
- Redis installation on centos7
- Xin'an Second Edition: Chapter 24 industrial control safety demand analysis and safety protection engineering learning notes
- About selenium starting Chrome browser flash back
- Connect to LAN MySQL
- Interpretation of Flink source code (II): Interpretation of jobgraph source code
- 1. Introduction to JVM
- Start job: operation returned an invalid status code 'badrequst' or 'forbidden‘
- Solr appears write Lock, solrexception: could not get leader props in the log
- 数据仓库建模使用的模型以及分层介绍
- 应用服务配置器(定时,数据库备份,文件备份,异地备份)
猜你喜欢
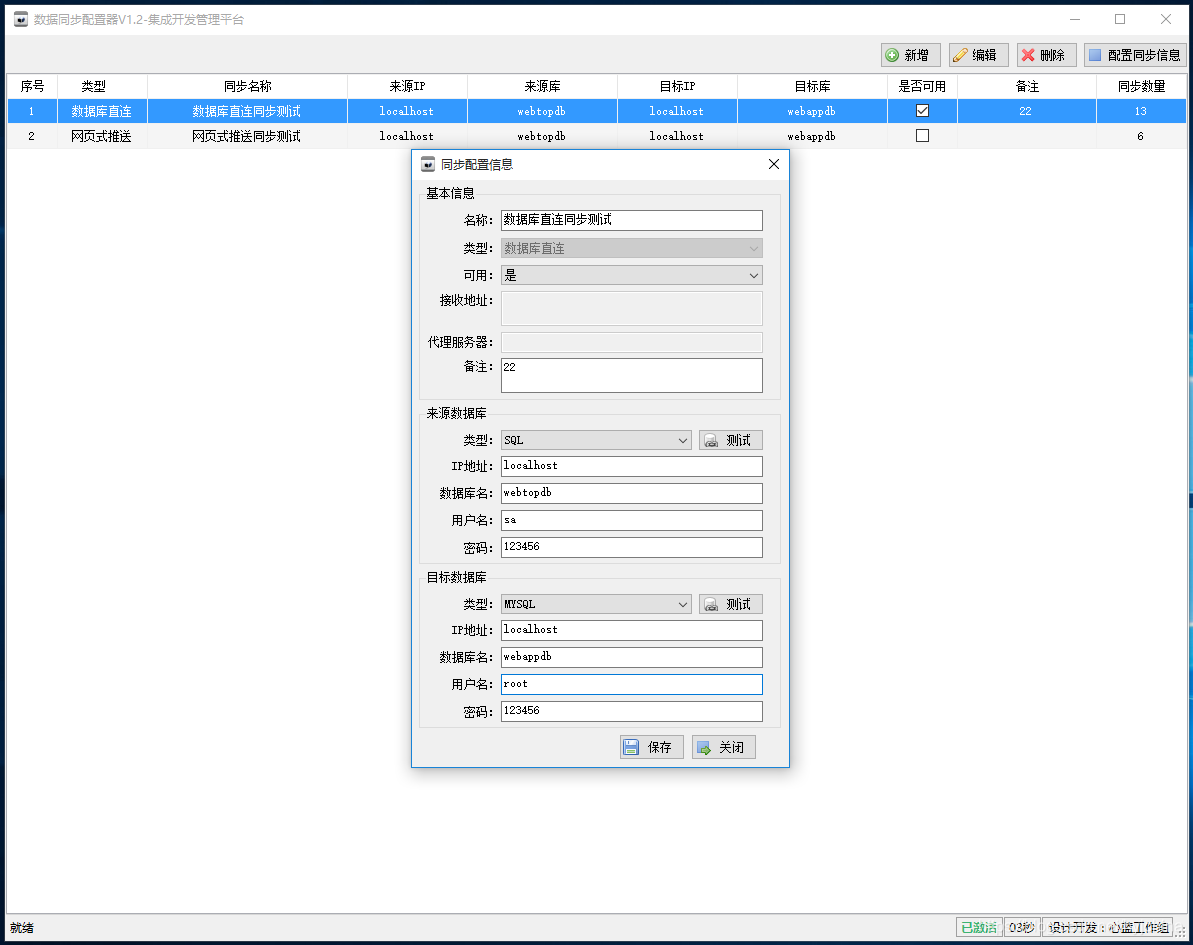
05个人研发的产品及推广-数据同步工具

JVM 垃圾回收器之Garbage First
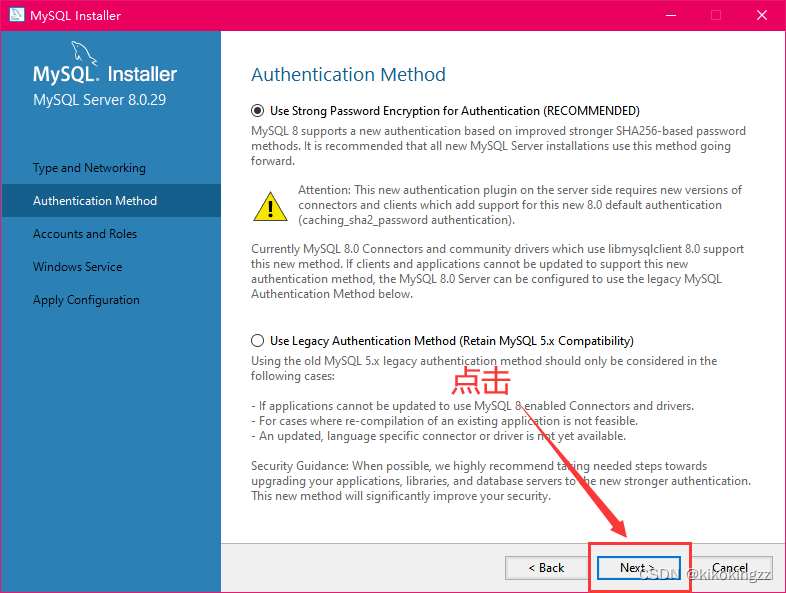
【MySQL入门】第一话 · 初入“数据库”大陆

PySpark算子处理空间数据全解析(5): 如何在PySpark里面使用空间运算接口
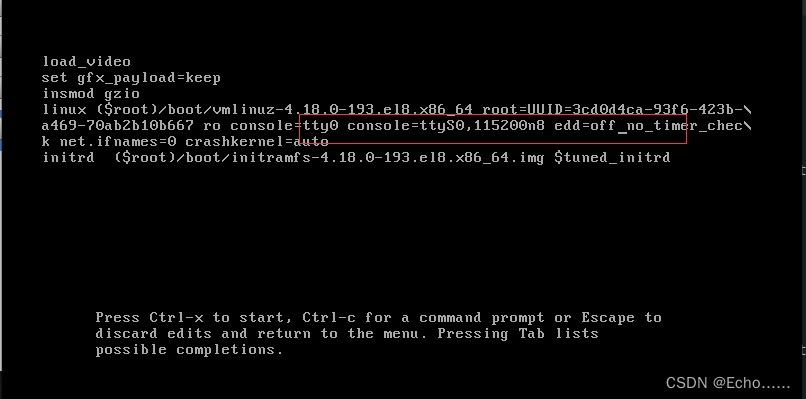
Virtual machine startup prompt probing EDD (edd=off to disable) error

【MySQL入门】第四话 · 和kiko一起探索MySQL中的运算符
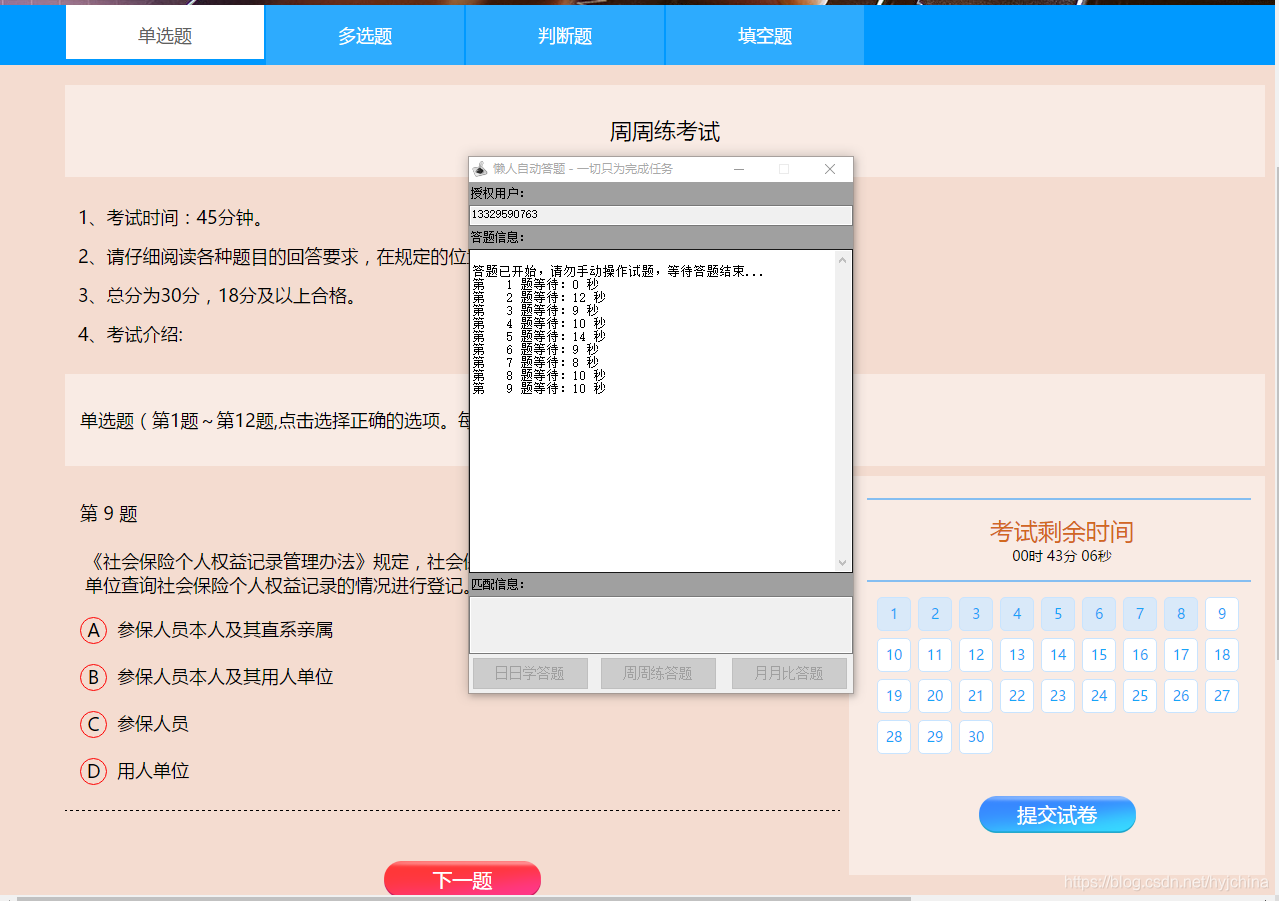
Selenium test of automatic answer runs directly in the browser, just like real users.
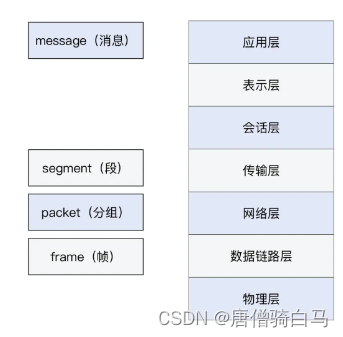
Concept and basic knowledge of network layering

Akamai anti confusion
Display picture of DataGridView cell in C WinForm
随机推荐
06 products and promotion developed by individuals - code statistical tools
JVM garbage collector part 2
【MySQL入门】第一话 · 初入“数据库”大陆
Pyspark operator processing spatial data full parsing (4): let's talk about spatial operations first
connection reset by peer
C WinForm series button easy to use
集成开发管理平台
信息与网络安全期末复习(完整版)
Jetpack compose 1.1 release, based on kotlin's Android UI Toolkit
[CISCN 2021 华南赛区]rsa Writeup
Vscode matches and replaces the brackets
Case: check the empty field [annotation + reflection + custom exception]
JVM class loading subsystem
MySQL advanced (index, view, stored procedure, function, password modification)
全网最全tcpdump和Wireshark抓包实践
Uipath browser performs actions in the new tab
February database ranking: how long can Oracle remain the first?
The problem of "syntax error" when uipath executes insert statement is solved
05 personal R & D products and promotion - data synchronization tool
【MySQL入门】第三话 · MySQL中常见的数据类型