当前位置:网站首页>永磁同步电机转子位置估算专题 —— 基波模型类位置估算概要
永磁同步电机转子位置估算专题 —— 基波模型类位置估算概要
2022-07-06 12:16:00 【深入浅出说电机】
引言
本篇文章将通过永磁同步电机基波模型估算转子位置的方法进行了分类整理,概括通过反电势估算角度、通过转子磁链估算角度、闭环类方案,三种不同思想,逐个分解,分别简述了其核心原理,并概况了不同方案的不同思想,给出相关论文供参考。
1、反电势类方法
上篇文章推导了 α β \alpha \beta αβ坐标系下的电压方程
[ v α v β ] = [ i α i β ] R s + d d t [ L s i α L s i β ] + [ − ω e ϕ f s i n θ ω e ϕ f c o s θ ] (1) \left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] = \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] R_s + \frac{d}{dt} \left[\begin{array}{c}L_s i_{\alpha }\\L_s i_{\beta } \end{array}\right] + \left[\begin{array}{c}- \omega_e \phi_{f } sin\theta \\ \omega_e\phi_{f}cos\theta \end{array}\right] \tag{1} [vαvβ]=[iαiβ]Rs+dtd[LsiαLsiβ]+[−ωeϕfsinθωeϕfcosθ](1)
其中 ω e \omega_e ωe为电角速度。
容易看出, α β \alpha \beta αβ电压由三部分组成,分别为电阻压降,电感电流变化产生的电压,等效永磁体磁链变化产生的反电动势。上文中说过,永磁同步电机转子位置可以从反电动势中提取。各种反电势类的位置估算方法的重点都是从电压方程中分离反电势项。 我们在运行无感foc时,电机定子电阻,电机定子电感,永磁体磁链常数为已知常数,电压电流为可测量参数,转速、转子位置为待估计参数。对于电压方程中的三个组成部分,电阻压降部分容易计算,电感电压因为涉及微分无法准确计算,虽然电压已知,但是因为电感电压直接计算误差大,难以直接分离反电动势成分。
对于这一类难以直接计算的内容,常常通过设计观测器的方式估算。
d d t [ i α i β ] = [ v α v β ] 1 L s − [ i α i β ] R s L s + [ − ω e ϕ f s i n θ ω e ϕ f c o s θ ] 1 L s (2) \frac{d}{dt} \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] = \left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] \frac{1}{L_s} - \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] \frac{R_s}{L_s} + \left[\begin{array}{c}- \omega_e \phi_{f } sin\theta \\ \omega_e\phi_{f}cos\theta \end{array}\right]\frac{1}{L_s} \tag{2} dtd[iαiβ]=[vαvβ]Ls1−[iαiβ]LsRs+[−ωeϕfsinθωeϕfcosθ]Ls1(2)
该写电压方程如上述形式,对于最右边一项反电势项,不易计算,作为未知部分,电流等于式子2右侧的积分。积分得到的电流与采样到的真实电流可能存在误差,用 e r r α , e r r β err_{\alpha} ,err_{\beta} errα,errβ表示。
[ i ^ α i ^ β ] = [ v α v β ] 1 L s − [ i ^ α i ^ β ] R s L s + [ x α + e r r α x β + e r r β ] 1 L s (3) \left[\begin{array}{c}\hat i_{\alpha }\\ \hat i_{\beta } \end{array}\right] = \left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] \frac{1}{L_s} - \left[\begin{array}{c} \hat i_{\alpha }\\ \hat i_{\beta } \end{array}\right] \frac{R_s}{L_s} + \left[\begin{array}{c}x_{\alpha} + err_{\alpha}\\ x_{\beta} +err_{\beta}\end{array}\right]\frac{1}{L_s} \tag{3} [i^αi^β]=[vαvβ]Ls1−[i^αi^β]LsRs+[xα+errαxβ+errβ]Ls1(3)
其中
e r r α = i α − i ^ α ; e r r β = i β − i ^ β err_{\alpha} = i_{\alpha} - \hat i_{\alpha};err_{\beta}= i_{\beta} - \hat i_{\beta} errα=iα−i^α;errβ=iβ−i^β
使用某种矫正方式,如滑膜,使 e r r α = 0 , e r r β = 0 err_{\alpha} = 0,err_{\beta} = 0 errα=0,errβ=0,则
[ x α x β ] = [ − ω e ϕ f s i n θ ω e ϕ f c o s θ ] \left[\begin{array}{c}x_{\alpha}\\ x_{\beta} \end{array}\right] = \left[\begin{array}{c}- \omega_e \phi_{f } sin\theta \\ \omega_e\phi_{f}cos\theta \end{array}\right] [xαxβ]=[−ωeϕfsinθωeϕfcosθ]
到此,完成反电势项分离,通过arctan或锁相环方式计算可以获得转子位置,对于转速,可以通过锁相环方式得到,也可以通过位置微分得到,另外, x α 2 + x β 2 / ϕ f \sqrt{ x_{\alpha}^2 + \\ x_{\beta}^2}/ \phi_f xα2+xβ2/ϕf也可以得到转子转速。
相关文章:
Kim H, Son J, Lee J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. IEEE Transactions on Industrial Electronics, 2010, 58(9): 4069-4077.
观测 i α , i β i_{\alpha},i_{\beta} iα,iβ,对传统的滑膜观测器使用Signum Function做开关函数,本文使用sigmoid function做开关函数,可以避免低通滤波。
Qiao Z, Shi T, Wang Y, et al. New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor[J]. IEEE Transactions on Industrial electronics, 2012, 60(2): 710-719.
这篇文章在上一篇文章基础上优化,设计了速度观测器,而非通过对角度微分计算速度。
2、磁链类方法
上篇文章中提到 α β \alpha \beta αβ坐标系电压方程的以下表达形式。
[ v α v β ] = [ i α i β ] R s + d d t [ ϕ α ϕ β ] (4) \left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] = \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] R_s + \frac{d}{dt} \left[\begin{array}{c} \phi_{\alpha }\\ \phi_{\beta } \end{array}\right] \tag{4} [vαvβ]=[iαiβ]Rs+dtd[ϕαϕβ](4)
其中 ϕ α ϕ β \phi_{\alpha} \phi_{\beta} ϕαϕβ表示 α β \alpha \beta αβ轴磁链
[ ϕ α ϕ β ] = ∫ ( [ v α v β ] − [ i α i β ] R s ) d t (5) \left[\begin{array}{c} \phi_{\alpha }\\ \phi_{\beta } \end{array}\right] = \int \left( {\left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] - \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] R_s }\right) dt \tag{5} [ϕαϕβ]=∫([vαvβ]−[iαiβ]Rs)dt(5)
整理式4,得到式5,磁链可以写为除电阻压降外,其他电压的积分。想象一个线圈,置于磁场中,当磁场变化,线圈首位两端会产生电压。容易理解式子4,理解了式子4,容易推导出式子5,式5通过电压的积分计算磁链,该式子可以称为永磁同步电机磁链模型的电压模型。。
上述 α β \alpha \beta αβ磁链为两个轴上的总的磁链,每个轴的磁链又可以写为转子部分磁链和定子部分磁链的组合。在 d q dq dq坐标系, d d d轴的定义是转子永磁体N极的方向,所以转子永磁体磁链 ϕ f \phi_f ϕf全在 d d d轴,同时 d q dq dq轴还存在定子磁链。
前面说到磁场的变化会在线圈两端产生电压,而永磁同步电机定子电感就是这样一个线圈。
由 ϕ = ∫ v d t \phi = \int{v}dt ϕ=∫vdt;且 L d i d t = v L\frac{di}{dt} = v Ldtdi=v;可得 ϕ = L i \phi = Li ϕ=Li;即流过线圈的电流产生的磁链为电感和电流的乘积,若 d q dq dq轴电流不为0, d q dq dq轴磁链中将会含有定子磁链成分,通过ipark变换得到 α β \alpha \beta αβ轴磁链,如下式。
[ ϕ α ϕ β ] = [ c o s θ s i n θ − s i n θ c o s θ ] [ L s i d + ϕ f L s i q ] (6) \left[\begin{array}{c} \phi_{\alpha }\\ \phi_{\beta } \end{array}\right] = \left[\begin{array}{c} cos\theta&sin\theta\\ -sin\theta & cos\theta \end{array}\right] \left[\begin{array}{c} L_s i_{d } + \phi_f\\ L_s i_{q } \end{array}\right] \tag{6} [ϕαϕβ]=[cosθ−sinθsinθcosθ][Lsid+ϕfLsiq](6)
该式子通过流过电感的电流计算 α β \alpha \beta αβ轴磁链,可以称为永磁同步电机磁链模型的电流模型。
因为转子位置信息包含在转子磁链分量,且该部分容易通过 α β \alpha \beta αβ坐标系的磁链方程分离,磁链类的位置估算方法多在 α β \alpha \beta αβ坐标系计算总的磁链,然后减去定子磁链,得到转子磁链,随后使用锁相环的方式获得转子位置和速度,或者通过反正切的方式获得转子位置,然后微分得到速度。
值得一提的是转子磁链跟电机转速无关,使用磁链法估算电机转子位置容易取得较好的低速性能。
要精准的分离转子磁链分量是一个磁链法的核心问题,常见的方式有通过电压电流模型分别计算总磁链,然后取某个不易变化的参考值矫正误差。或者著名的参考模型自适应的方法,以电流模型为参考,电压模型自适应;也可以两个模型直接融合,低速时多相信电流模型,高速时多相信电压模型。
磁链类的方式为2010年之后较为流行的方法,具体展开讲有极多值得讨论的点,相关内容后续会再开文章分析。
相关文章:
Lee J, Hong J, Nam K, et al. Sensorless control of surface-mount permanent-magnet synchronous motors based on a nonlinear observer[J]. IEEE Transactions on power electronics, 2009, 25(2): 290-297.
著名的非线性观测器,使用转子磁链矫正电压模型。
An L, Franck D, Hameyer K. Sensorless control for surface mounted permanent magnet synchronous machines at low speed[C]//2013 International Conference on Electrical Machines and Systems (ICEMS). IEEE, 2013: 77-82.
使用电流模型矫正电压模型,或使用采样电流矫正电压模型。
3、闭环类方法
先看 d q dq dq坐标系电压方程
u d = R s i d + L d d i d d t − ω e L q i q u q = R s i q + L q d i q d t + ω e L d i d + ω e ϕ f (7) u_d = R_s i_d + L_d \frac{di_d}{dt}- \omega_eL_qi_q\\ u_q = R_s i_q + L_q \frac{di_q}{dt} + \omega_e L_d i_d + \omega_e \phi_f \tag{7} ud=Rsid+Lddtdid−ωeLqiquq=Rsiq+Lqdtdiq+ωeLdid+ωeϕf(7)
d q dq dq坐标系下的位置估算思想和前面提到的有本质区别,前面提到的两类方法都属于开环类的方案,位置观测器的输入是 i α , i β ; u α , u β i_{\alpha},i_{\beta};u_{\alpha},u_{\beta} iα,iβ;uα,uβ,观测器的输出是角度和速度。观测器的输出不会反过来影响输入。
但是 d q dq dq坐标系下的方案不同,这类方案要求输入使用观测器输出的角度计算得到的 i d , i q ; u d , u q i_d,i_q;u_d,u_q id,iq;ud,uq,然后使用 i d , i q i_d,i_ q id,iq通过电压方程计算得到 u ^ d , u ^ q \hat u_d,\hat u_q u^d,u^q,或者使用 u d , u q u_d,u_ q ud,uq通过电压方程计算得到 i ^ d , i ^ q \hat i_d,\hat i_q i^d,i^q,估计值与采样值对比,如果角度比较准确,误差就比较小,或者反过来说如果通过矫正使估算误差趋于0,那么观测器输出的角度收敛在真实角度附近了。
回头看 d q dq dq坐标系下的电压方程,在额定转速工况下反电势分量 ω e ϕ f \omega_e\phi_f ωeϕf一般能占到 q q q轴电压的70%以上,如果角度准确,反电势成分将全部出线在 q q q轴,如果角度存在误差, d d d轴会出现反电势分量,使用电压方程计算得到的 d d d轴电压会明显小于park变换得到的 d d d轴电压。闭环类的方法多将类似的误差作为输入,设计调节器,调节器的输出为转速或角度,调节使得误差趋近与0,角度即为准确的角度。
这一类方案也有较多值得讨论的地方,后续开文章具体分析。
相关文章:
Lascu C, Andreescu G D. PLL position and speed observer with integrated current observer for sensorless PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2020, 67(7): 5990-5999.
2020年的新论文,使用电流观测器估算 d q dq dq电流,通过电流误差反应角度及速度误差。
Harnefors L, Ottersten R. Regenerating-Mode Stabilization of the “Statically Compensated Voltage Model”[J]. IEEE Transactions on Industrial Electronics, 2007, 54(2): 818-824.
实现了较好的低速性能
4、小结
上面说了3类方法的具体原理,根据我对行业的了解及观察,反电势类的方法在早些年为主流方法,至今高速电机控制类的方案也在沿用,这一类的方法难以取得较好的低速性能。磁链类的方法是近些年的主流,很多通用平台如ti fast方案使用磁链类方法,这一类方法容易取得较好的低速性能。闭环类方法为新型方案,也能取得较好的低速性能,网传汇川已经转向这一类方案,根据我对行业趋势的判断,这一类方法未来会得到更多的应用。
边栏推荐
- Teach you to learn JS prototype and prototype chain hand in hand, a tutorial that monkeys can understand
- Oceanbase Community Edition OBD mode deployment mode stand-alone installation
- 【Yann LeCun点赞B站UP主使用Minecraft制作的红石神经网络】
- POJ1149 PIGS 【最大流量】
- Leetcode brush first_ Maximum Subarray
- Tencent T2 Daniel explained in person and doubled his job hopping salary
- 数据的同步为每个站点创建触发器同步表
- Li Kou 101: symmetric binary tree
- 社招面试心得,2022最新Android高频精选面试题分享
- 技术分享 | 抓包分析 TCP 协议
猜你喜欢
![[network planning] Chapter 3 data link layer (4) LAN, Ethernet, WLAN, VLAN](/img/b8/3d48e185bb6eafcdd49889f0a90657.png)
[network planning] Chapter 3 data link layer (4) LAN, Ethernet, WLAN, VLAN
深入浅出,面试突击版
![[Yann Lecun likes the red stone neural network made by minecraft]](/img/95/c3af40c7ecbd371dd674aea19b272a.png)
[Yann Lecun likes the red stone neural network made by minecraft]
【Yann LeCun点赞B站UP主使用Minecraft制作的红石神经网络】
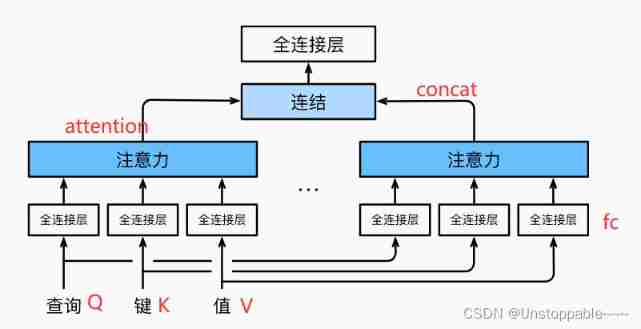
Transformer model (pytorch code explanation)
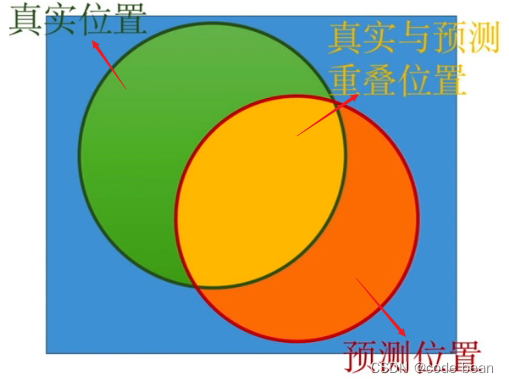
理解 YOLOV1 第二篇 预测阶段 非极大值抑制(NMS)

夏志刚介绍
Example of applying fonts to flutter
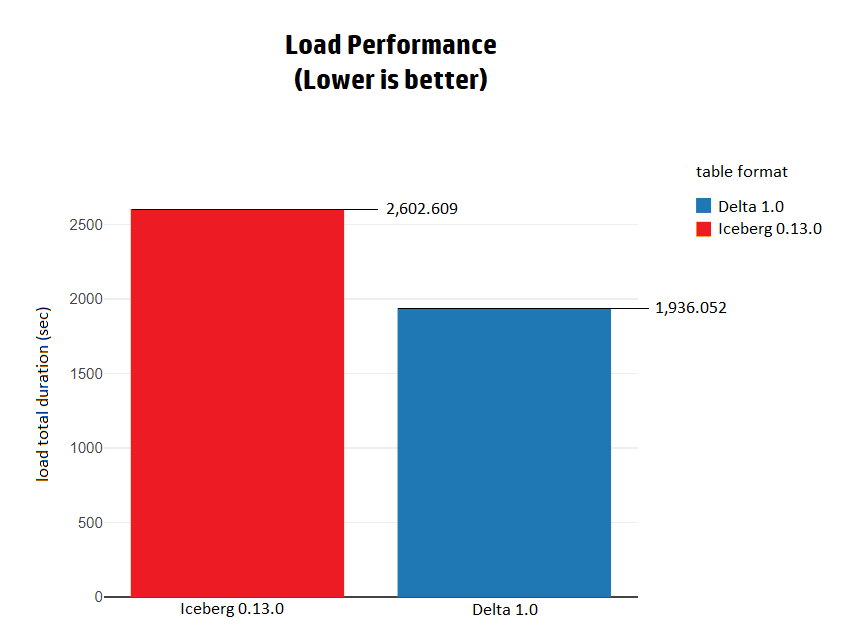
Hudi vs Delta vs Iceberg
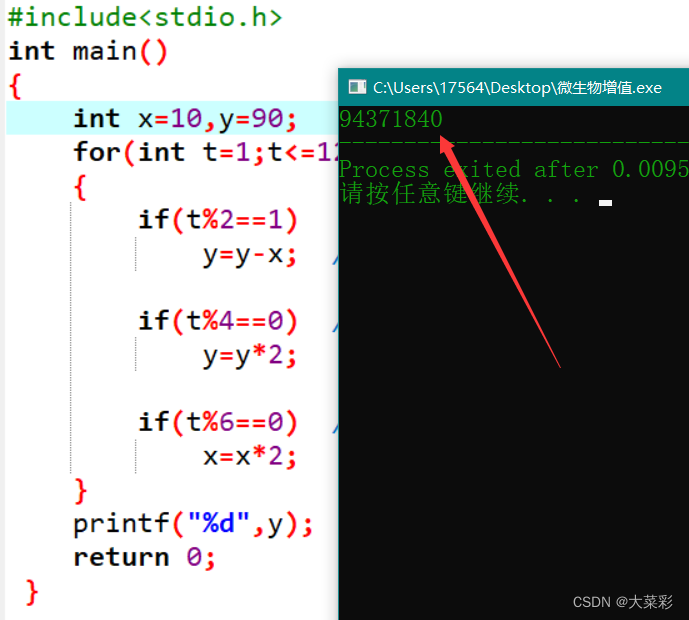
Blue Bridge Cup microbial proliferation C language
随机推荐
Crawler (14) - scrape redis distributed crawler (1) | detailed explanation
Oceanbase Community Edition OBD mode deployment mode stand-alone installation
Appx代码签名指南
Leetcode brush first_ Maximum Subarray
Poj3617 best cow line
Tencent architects first, 2022 Android interview written examination summary
22-07-05 七牛云存储图片、用户头像上传
颜色(color)转换为三刺激值(r/g/b)(干股)
深度剖析原理,看完这一篇就够了
腾讯云数据库公有云市场稳居TOP 2!
Tencent cloud database public cloud market ranks top 2!
Li Kou 101: symmetric binary tree
句号压缩过滤器
[network planning] Chapter 3 data link layer (4) LAN, Ethernet, WLAN, VLAN
(3) Web security | penetration testing | basic knowledge of network security construction, IIS website construction, EXE backdoor generation tool quasar, basic use of
腾讯安卓开发面试,android开发的基础知识
【云原生与5G】微服务加持5G核心网
beegfs高可用模式探讨
redisson bug分析
Synchronization of data create trigger synchronization table for each site