当前位置:网站首页>Theoretical description of linear equations and summary of methods for solving linear equations by eigen
Theoretical description of linear equations and summary of methods for solving linear equations by eigen
2022-07-03 18:01:00 【Not late not late】
List of articles
1. System of linear equations ( matrix equation ) theory
A system of linear equations is a system of equations in which each equation is linear with respect to an unknown quantity , The equation is expressed as follows :
{ a 1 x 1 + b 1 x 2 + c 1 x 3 = d 1 a 2 x 1 + b 2 x 2 + c 2 x 3 = d 2 a 3 x 1 + b 3 x 2 + c 3 x 3 = d 3 \left\{\begin{matrix} \ a_1x_1+b_1x_2+c_1x_3=d_1\\ \ a_2x_1+b_2x_2+c_2x_3=d_2\\ \ a_3x_1+b_3x_2+c_3x_3=d_3 \end{matrix}\right. ⎩⎨⎧ a1x1+b1x2+c1x3=d1 a2x1+b2x2+c2x3=d2 a3x1+b3x2+c3x3=d3
Write the thread equation in matrix form as follows :
A x = b Ax = b Ax=b
among ,
A = ( a 1 b 1 c 1 a 2 b 2 c 2 a 3 b 3 c 3 ) , x = ( x 1 x 2 x 3 ) , d = ( d 1 d 2 d 3 ) A=\begin{pmatrix} a_{1}& b_{1}& c_{1}\\ a_{2}& b_{2}& c_{2}\\ a_{3}& b_{3}& c_{3} \end{pmatrix},x =\begin{pmatrix}x_1\\x_2\\x_3\end{pmatrix},d=\begin{pmatrix}d_1\\d_2\\d_3\end{pmatrix} A=⎝⎛a1a2a3b1b2b3c1c2c3⎠⎞,x=⎝⎛x1x2x3⎠⎞,d=⎝⎛d1d2d3⎠⎞
Eigen Provides a wealth of linear equation solving methods , Include LU Decomposition ,QR Decomposition ,SVD( Singular value decomposition )、 Eigenvalue decomposition and other basis A Type of matrix 、 Requirements for accuracy of results and calculation speed , You can choose different calculation methods , Let's introduce one by one .
The picture below is Eigen Introduction of some decomposition methods .
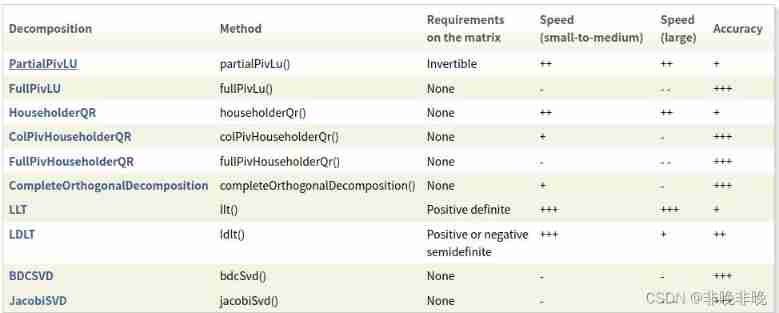
If you know matrix well , Then you can easily choose a reasonable solution , For example, if the matrix A Is a full rank and asymmetric matrix , Then you can choose PartialPivLU Solution , If you know that your matrix is symmetric positive definite , So choose LLT perhaps LDLT Decomposition is a good choice . The following figure shows the speed of some solutions .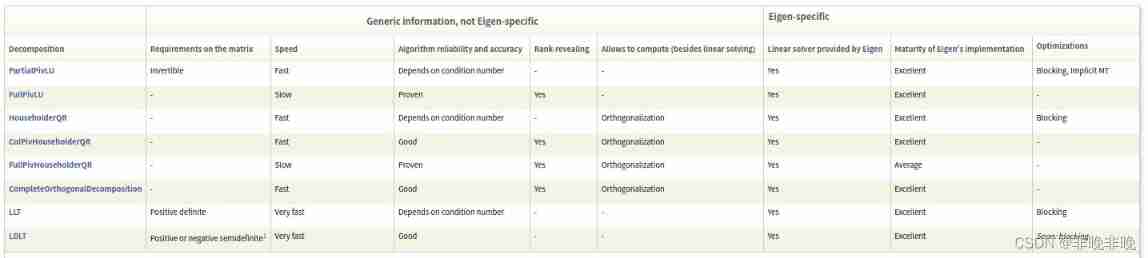
2. QR decompose
QR( Orthogonal triangle ) The decomposition method is the most effective and widely used method for finding all eigenvalues of a general matrix , A general matrix is first transformed by orthogonal similarity into Hessenberg matrix , And then apply QR Methods to find eigenvalues and eigenvectors . It decomposes the matrix into a normal orthogonal matrix Q And the upper triangular matrix R, So called QR Decomposition , And the general symbol of this normal orthogonal matrix Q of .
A = Q R A = QR A=QR
among Q It's an orthogonal matrix ( Or unitary matrix ), namely Q Q T = 1 QQ^T=1 QQT=1, R R R It's an upper triangular matrix .QR There are three common methods of decomposition :Givens Transformation 、Householder Transformation , as well as Gram-Schmidt Orthogonalization .
- HouseholderQR: No rotation (no pivoting), Fast but unstable
- ColPivHouseholderQR: Column rotation (column pivoting), Slower but more accurate
- FullPivHouseholderQR: Full rotation (full pivoting), Slow speed , Most stable
The following code cannot compare speed and accuracy , Because the matrix is too small .
2.1 HouseholderQR
HouseholderQR Decomposition is 3 Kind of QR The fastest kind of decomposition , But the accuracy is the lowest .
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3f A;
Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
Vector3f x = A.householderQr().solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
-2
0.999998
1
The calculation of linear equations takes time : 480 us
2.2 ColPivHouseholderQR
ColPivHouseholderQR Speed and accuracy are at 3 Intermediate states in the decomposition method , It's a good compromise .
- The code for
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3f A;
Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
Vector3f x = A.colPivHouseholderQr().solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
-2
0.999997
1
The calculation of linear equations takes time : 482 us
2.3 FullPivHouseholderQR
FullPivHouseholderQR Decomposition is 3 individual QR The one with the highest accuracy in decomposition , But its speed is also the slowest .
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3f A;
Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
Vector3f x = A.fullPivHouseholderQr().solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
-2
1
0.999999
The calculation of linear equations takes time : 131 us
3. LLT decompose
LLT Decomposition requires coefficient matrix A It's a positive definite matrix (Positive definite matrix), It is the fastest of all decomposition methods . When used for the decomposition of non positive definite matrix , It is difficult to get the right result .
LLT Decomposition is matrix Cholesky decompose , Also known as square root decomposition , yes LDLT A special form of decomposition , That is, one of them D Is the unit matrix . Symmetric positive definite matrices A It can be decomposed into a lower triangular matrix L and L The transpose LT The form of multiplication :
A = L L T = R T R A=LL^T=R^TR A=LLT=RTR
Among them L It's a lower triangular matrix ,R It's an upper triangular matrix .
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3f A;
Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
Vector3f x = A.llt().solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
4.4556
-0.3184
-0.026
The calculation of linear equations takes time : 97 us
4. LDLT decompose
LDLT Decomposition requires coefficient matrix A It's a positive definite matrix (positive definite matrix) Or semi negative definite matrix (negative semi-definite matrix). When used for the decomposition of other matrices , It is difficult to get the right result .
A Is symmetric matrix , And any one K The principal submatrix of order is not 0 when ,A There are the following unique decomposition forms :
namely L Is the lower triangular identity matrix ,D It's a diagonal matrix .LDLT The method is actually Cholesky Improvement of decomposition method (LLT Decomposition requires square ), For solving linear equations .
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3f A;
Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
Vector3f x = A.ldlt().solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
4.4556
-0.3184
-0.026
The calculation of linear equations takes time : 100 us
5. LU decompose
LU decompose (LU Decomposition) It is the most common kind of matrix decomposition , It is also the most classic , It can decompose a matrix into the product of a unit lower triangular matrix and an upper triangular matrix . Put the given coefficient matrix A Into two equivalent matrices L and U The product of the , among L and U They are unit lower triangular matrix and upper triangular matrix .
5.1 LU decompose
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3f A;
Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
Vector3f x = A.lu().solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
-2
1
0.999999
The calculation of linear equations takes time : 200 us
5.2 partialPivLu
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3f A;
Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
Vector3f x = A.partialPivLu().solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
-2
1
0.999999
The calculation of linear equations takes time : 390 us
5.3 fullPivLu
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3f A;
Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
Vector3f x = A.fullPivLu().solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
-2
0.999998
1
The calculation of linear equations takes time : 397 us
6. SVD decompose
Singular value decomposition (Singular Value Decomposition, hereinafter referred to as SVD) It is a widely used algorithm in the field of machine learning , It can not only be used for feature decomposition in dimensionality reduction algorithms , It can also be used in recommendation systems , And natural language processing . Is the cornerstone of many machine learning algorithms .SVD It's also a decomposition of the matrix , But unlike feature decomposition ,SVD The matrix to be decomposed is not required to be a square matrix . Suppose our matrix A It's a m×n Matrix , So let's define the matrix A Of SVD by :
A = U D V T = ( Σ 0 0 0 ) A = UDV^T = \begin{pmatrix} \Sigma & 0 \\ 0 & 0 \end{pmatrix} A=UDVT=(Σ000)
among , U U U by m × m m\times m m×m Matrix , Σ \Sigma Σ by m × n m\times n m×n Matrix , V V V by n × n n\times n n×n Matrix . Σ = d i a g ( σ 1 , σ 2 , . . . , σ r ) \Sigma=diag({\sigma}_1,{\sigma}_2,...,{\sigma}_r ) Σ=diag(σ1,σ2,...,σr), σ {\sigma} σ For matrix A All nonzero singular values of . U U U and V V V Satisfy , U T U = I , V T V = I U^TU=I,V^TV = I UTU=I,VTV=I
When the number of equations is greater than the number of unknowns , The least square solution is required , The most effective way is to SVD decompose ,Eigen Two decomposition methods are provided , Namely BDCSVD and JacobiSVD. Generally, it is recommended to use BDCSVD, It can well expand large matrices , For smaller matrices , It will automatically return to JacobiSVD class .
Be careful : use SVD When it breaks down , Use Dynamic matrix Define coefficient matrix A、 Constant matrix b、 Matrix of unknowns x.
6.1 BDCSVD decompose
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
MatrixXd A(3,2); // coefficient matrix A,3×2 rank
VectorXd b(3,1); // Constant matrix b,3×1 rank
VectorXd x(3,1); // Matrix of unknowns x,3×1 rank
A << 1, 2, 4, 5, 7, 8;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
x = A.bdcSvd(ComputeThinU | ComputeThinV).solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2
4 5
7 8
Here is the vector b:
3
3
4
The solution is:
-2.5
2.66667
The calculation of linear equations takes time : 675 us
6.2 JacobiSVD decompose
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
MatrixXd A(3,2); // coefficient matrix A,3×2 rank
VectorXd b(3,1); // Constant matrix b,3×1 rank
VectorXd x(3,1); // Matrix of unknowns x,3×1 rank
A << 1, 2, 4, 5, 7, 8;
b << 3, 3, 4;
struct timeval start, end;
gettimeofday(&start, NULL);
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the vector b:\n" << b << endl;
x = A.jacobiSvd(ComputeThinU | ComputeThinV).solve(b);
cout << "The solution is:\n" << x << endl;
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
}
Output :
Here is the matrix A:
1 2
4 5
7 8
Here is the vector b:
3
3
4
The solution is:
-2.5
2.66667
The calculation of linear equations takes time : 578 us
7. Inverse matrix method
Eigen It also provides an algorithm for finding the inverse matrix and the determinant of the matrix , But these two algorithms are very uneconomical algorithms for large matrices , When you need to do this kind of operation on a large matrix , You need to judge whether you need to do this . But for small matrices Can be used without concern .
#include <iostream>
#include<sys/time.h>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
Matrix3d A; // coefficient matrix A
Vector3d b; // Constant matrix b
Vector3d x; // Matrix of unknowns x
A << 1, 2, 3, 4, 5, 6, 7, 8, 10;
b << 3, 3, 4;
cout << " coefficient matrix A:\n"
<< A << endl;
cout << " Constant matrix b:\n"
<< b << endl;
struct timeval start, end;
gettimeofday(&start, NULL);
if (A.determinant() != 0)
{
// The matrix determinant is greater than 0,
x = A.inverse() * b;
cout << " Matrix of unknowns x:\n"
<< x << endl;
}
else
{
cout << " The matrix determinant is less than 0, Matrix equation has no solution !\a\n"
<< endl;
}
gettimeofday(&end, NULL);
int timeuse = 1000000 * (end.tv_sec - start.tv_sec) + end.tv_usec - start.tv_usec;
printf(" The calculation of linear equations takes time : %d us\n", timeuse);
return 0;
}
Output :
coefficient matrix A:
1 2 3
4 5 6
7 8 10
Constant matrix b:
3
3
4
Matrix of unknowns x:
-2
1
1
The calculation of linear equations takes time : 63 us
Reference documents :
https://eigen.tuxfamily.org/dox/group__TutorialLinearAlgebra.html
https://blog.csdn.net/qq_41839222/article/details/96274251
边栏推荐
- STM32实现74HC595控制
- Postfix 技巧和故障排除命令
- 图像24位深度转8位深度
- The third day of writing C language by Yabo people
- The second largest gay dating website in the world was exposed, and the status of programmers in 2022
- Keepalived 设置不抢占资源
- 一入“远程”终不悔,几人欢喜几人愁。| 社区征文
- Redis on local access server
- Valentine's day, send you a little red flower~
- 毕业总结
猜你喜欢

基于人脸识别的课堂考勤系统 tkinter+openpyxl+face_recognition
![The number of incremental paths in the grid graph [dfs reverse path + memory dfs]](/img/57/ff494db248171253996dd6c9110715.png)
The number of incremental paths in the grid graph [dfs reverse path + memory dfs]

1147_ Makefile learning_ Target files and dependent files in makefile
Implementation of Tetris in C language
BFS - topology sort

Three gradient descent methods and code implementation
![[combinatorics] generating function (summation property)](/img/74/e6ef8ee69ed07d62df9f213c015f2c.jpg)
[combinatorics] generating function (summation property)
AcWing 271. 杨老师的照相排列【多维DP】
Discussion sur la logique de conception et de mise en oeuvre du processus de paiement

PHP MySQL create database
随机推荐
Redis core technology and practice - learning notes (VIII) sentinel cluster: sentinel hung up
Applet with multiple tabs and Swipers + paging of each tab
c# .net 工具生态
模块九作业
Kotlin's collaboration: Context
(8) HS corner detection
A. Berland Poker & 1000 [simple mathematical thinking]
Life perception 1
Line by line explanation of yolox source code of anchor free series network (5) -- mosaic data enhancement and mathematical understanding
[tutorial] build your first application on coreos
Basic grammar of interview (Part 2)
Module 9 operation
STM32 realizes 74HC595 control
【统信UOS】扫描仪设备管理驱动安装
Website with JS doesn't work in IE9 until the Developer Tools is activated
Postfix tips and troubleshooting commands
OpenSSL的SSL/BIO_get_fd
Prototype inheritance..
Design limitations of structure type (struct)
The third day of writing C language by Yabo people