当前位置:网站首页>mujoco+spinningup进行强化学习训练快速入门
mujoco+spinningup进行强化学习训练快速入门
2022-07-25 13:14:00 【抓紧爬起来不许摆烂】
1、搭建env
目标:使用强化学习做力控,使机器人(UR5)平稳地运动到指定位置,并保持该状态。
env的几个要素*:
必要方法:step(action)、reset()、render()
必要元素:action_space、observation_space
我们在写环境就是实现这几个基本要素的过程
(1)初始化MuJoCo相关的组件
self.model = mp.load_model_from_path('ur5.xml') # 从路径加载模型。
self.sim = mp.MjSim(self.model) # MjSim 表示一个正在运行的模拟,包括其状态。
self.viewer = mp.MjViewer(self.sim) #显示器
(2) 设置动作和状态空间
self.action_high = np.array([2, 2, 2, 1, 1, 1], dtype=np.float32)
self.action_space = spaces.Box(-self.action_high, self.action_high, dtype=np.float32)
self.observation_high = np.array([np.finfo(np.float32).max] * 12)
self.observation_space = spaces.Box(-self.observation_high, self.observation_high, dtype=np.float32)
action_space是由控制器的范围直接决定的,我们希望做一个力控,也就是把动作的输入直接给控制器上。
action_high即三个-2到2,三个-1到1,对称的
观测的是六个关节,共12个量,即对每个关节的位置和速度信息进行观测
(3) step实现
对于step的实现,直接将action输出到力控的接口
self.sim.data.ctrl[i] = action[i]
reward设为关节位置偏差求和。偏差越大,reward的值越小,反之越大
r -= abs(self.sim.data.qpos[i] - self.target[i])
state设置为各关节的位置和速度组成的向量
self.state[i] = self.sim.data.qpos[i]
self.state[i + 6] = self.sim.data.qvel[i]
(4) render
self.viewer.render()
(5) reset
关节位置速度归零
self.sim.data.qpos[i] = 0
self.sim.data.qvel[i] = 0
self.state = [0] * 12
(6)完整环境代码
# UR5_Controller.py
import mujoco_py as mp
import numpy as np
from gym import spaces
class UR5_Controller(object):
def __init__(self, target): #传入目标位置
self.model = mp.load_model_from_path('ur5.xml') # 从路径加载模型。
self.sim = mp.MjSim(self.model) # MjSim 表示一个正在运行的模拟,包括其状态。
self.viewer = mp.MjViewer(self.sim) #显示器
self.state = [0] * 12
self.action_high = np.array([2, 2, 2, 1, 1, 1], dtype=np.float32)
self.action_space = spaces.Box(-self.action_high, self.action_high, dtype=np.float32)
self.observation_high = np.array([np.finfo(np.float32).max] * 12)
self.observation_space = spaces.Box(-self.observation_high, self.observation_high, dtype=np.float32)
self.target = target
def step(self, action):
for i in range(6):
self.sim.data.ctrl[i] = action[i] # 直接将action输出到控制器接口
self.sim.step() # step的调用
r = 0
for i in range(6):
r -= abs(self.sim.data.qpos[i] - self.target[i]) # 6个关节的偏差进行一个累加
# r -= abs(self.sim.data.qvel[i])
self.state[i] = self.sim.data.qpos[i] # state更新成每次的速度和位置
self.state[i + 6] = self.sim.data.qvel[i]
done = False
# if r < -50:
# done = True
# print(r)
return np.array(self.state, dtype=np.float32), r, done, {
} # 返回状态(observaton观测到的一些东西),reward,是否完成过程的一个标记,返回一个info(包括一些信息,一般是自检的形式。比如希望返回是否在一个高速的状态,可以在里面写上一些具体的信息,自己定义的,一般可以在输出上使用))
def render(self):
self.viewer.render()
def reset(self): # 从摄像机渲染视图,并将图像作为 numpy.ndarray 返回。
self.sim.reset()
for i in range(6):
self.sim.data.qpos[i] = 0
self.sim.data.qvel[i] = 0
self.state = [0] * 12
return np.array(self.state, dtype=np.float32) # 返回reset后的状态
def close(self):
pass
2、spinning up框架介绍
这是一个性能上比较优秀的强化学习框架,它的实验细节比baseline好很多。spinningup的训练效率也比baseline好很多。
支持mpi多线程
Ubuntu: sudo apt-get update && sudp apt-get install libopenmpi-dev
Mac OSX: brew install openmpi
注意:这里不建议使用conda,可能会出问题
安装spinningup
git clone https://github.com/openai/spinningup.git
cd spinningup
pip install -e .
安装测试
python -m spinup.run ppo --hid "[32,32]"--env LunarLander-v2 --exp_name installtest --gamma 0.999
python -m spinup.run test_policy data/installtest/installtest_s0
python -m spinup.run plot data/installtest/installtest_so
3、训练+运行
使用spinningup强化学习算法库编写的运行程序
# main.py
from spinup import ppo_pytorch as ppo
from UR5_Controller import UR5_Controller
from spinup.utils.test_policy import load_policy_and_env, run_policy
import torch
TRAIN = 0 # 0:运行已有信息 1:训练模式
target = [0, -1.57, 1.57, 0, 0, 0] # 目标位置
env = lambda : UR5_Controller(target) # 创建环境
if TRAIN:
ac_kwargs = dict(hidden_sizes=[64,64], activation=torch.nn.ReLU) # 网络参数:隐藏层,激活函数
logger_kwargs = dict(output_dir='log', exp_name='ur5_goToTarget')# 记录和输出信息的函数
ppo(env, ac_kwargs=ac_kwargs, logger_kwargs=logger_kwargs,
steps_per_epoch=5000, epochs=4000)
else:
_, get_action = load_policy_and_env('log') # 读取log中的信息
env_test = UR5_Controller(target)
run_policy(env_test, get_action)
边栏推荐
- Numpy简介和特点(一)
- Handwriting a blog platform ~ first day
- G027-OP-INS-RHEL-04 RedHat OpenStack 创建自定义的QCOW2格式镜像
- web安全入门-UDP测试与防御
- Azure Devops(十四) 使用Azure的私有Nuget仓库
- 【GCN-RS】Learning Explicit User Interest Boundary for Recommendation (WWW‘22)
- 错误: 找不到或无法加载主类 xxxx
- Error: cannot find or load main class XXXX
- 程序员奶爸自制AI喂奶检测仪,预判宝宝饿点,不让哭声影响老婆睡眠
- 程序的内存布局
猜你喜欢
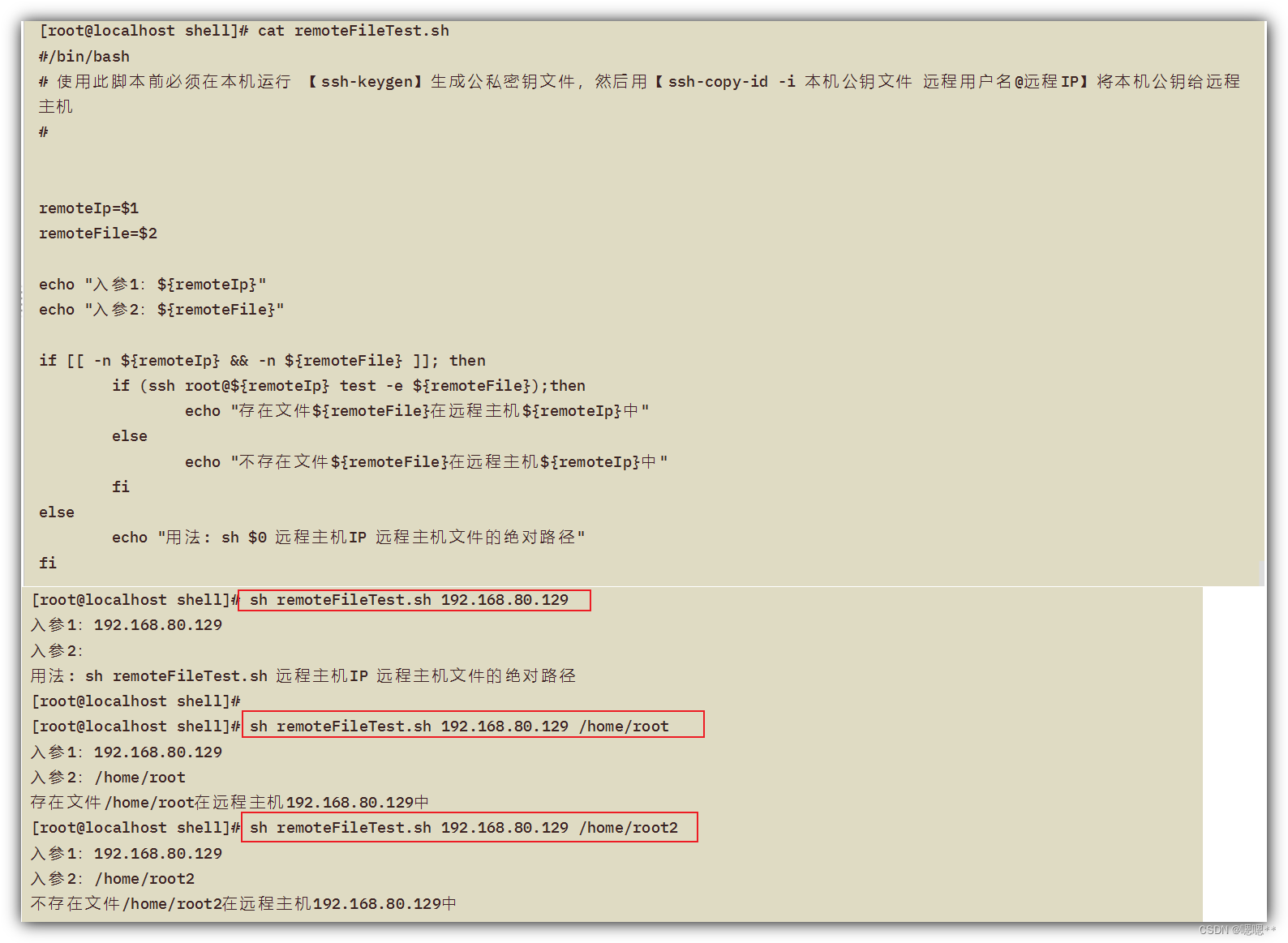
Shell常用脚本:判断远程主机的文件是否存在

Masscode is an excellent open source code fragment manager

The programmer's father made his own AI breast feeding detector to predict that the baby is hungry and not let the crying affect his wife's sleep
G027-OP-INS-RHEL-04 RedHat OpenStack 创建自定义的QCOW2格式镜像

如何理解Keras中的指标Metrics
![[ai4code final chapter] alphacode: competition level code generation with alphacode (deepmind)](/img/05/86eed30a7c063beace400a005e4a4c.png)
[ai4code final chapter] alphacode: competition level code generation with alphacode (deepmind)

Design and principle of thread pool

工业互联网的内涵及其应用

C#基础学习(二十三)_窗体与事件

【视频】马尔可夫链原理可视化解释与R语言区制转换MRS实例|数据分享
随机推荐
Convolutional neural network model -- lenet network structure and code implementation
Any time, any place, super detective, seriously handle the case!
Emqx cloud update: more parameters are added to log analysis, which makes monitoring, operation and maintenance easier
Pytorch creates its own dataset and loads the dataset
[300 opencv routines] 239. accurate positioning of Harris corner detection (cornersubpix)
mysql函数汇总之日期和时间函数
Common operations for Yum and VIM
IM系统-消息流化一些常见问题
卷积神经网络模型之——GoogLeNet网络结构与代码实现
Numpy简介和特点(一)
Shell common script: check whether a domain name and IP address are connected
How to solve the problem of taking up too much space when recording and editing videos?
My creation anniversary
Mlx90640 infrared thermal imager temperature sensor module development notes (V)
B树和B+树
全网最简单解决方式1045-Access denied for user [email protected](using password:YES)
Convolutional neural network model -- alexnet network structure and code implementation
一味地做大元宇宙的规模,已经背离了元宇宙本该有的发展逻辑
【AI4Code】CodeX:《Evaluating Large Language Models Trained on Code》(OpenAI)
二叉树基本知识