当前位置:网站首页>M2dgr: slam data set of multi-source and multi scene ground robot (ICRA 2022)
M2dgr: slam data set of multi-source and multi scene ground robot (ICRA 2022)
2022-07-02 18:50:00 【3D vision workshop】
Paper:https://arxiv.org/pdf/2112.13659.pdf
Source :ICRA2022 & RAL2021
Project address :https://github.com/SJTU-ViSYS/M2DGR
Speaker :M2DGR One work was handed over to master Yinjie , Tutor Professor zoudanping ;
ICRA Official share :https://www.bilibili.com/video/BV1q3411G7iF
Paper Literature Review: Temporary vacancy ;
Notes
The outline :
1. Multi-source SLAM Current situation of the development of
2. Main stream SLAM Data set review
3.M2DGR Acquisition platform and environment
4. Experimental evaluation and result analysis
5. Data set usage guide
1 Multi-source SLAM Current situation of the development of
The main contents include : Vision SLAM、 laser SLAM、 Multi source fusion ;
among : Multi source fusion SLAM Method Can effectively improve SLAM Accuracy and robustness , It is one of the hottest fields at present ;

VSLAM It is mainly divided into the above four modules ; It is mainly divided into traditional methods and learning based methods ; At present, academia will think ORB-SLAM3 Performance ratio of VINS-Mono Better , This is TUM-VI and EuRoC Conclusions drawn on two data sets , But the speaker found through experimental verification : On cars and real cars ,VINS-Mono Performance will be more stable , It would be better ,ORB-SLAM3 It is easy to track failures on such a platform ; If it is on a small scale or by a large number of loops ,ORB-SLAM3 It can reach decimeter level , Even centimeter accuracy .SVO2 Compared with the SVO, Added multi-purpose support 、 Back end optimization and loopback detection , Comparable performance ORB-SLAM3;DM-VIO Is the latest job . It is a system of delayed marginalization , Performance can also be comparable ORB-SLAM3; The above algorithms have their own advantages and disadvantages on different data sets , Can be regarded as SOTA Algorithm ;
Based on learning SLAM In the system ,Droid-slam It's all SLAM The positioning accuracy is the highest , Its presence TUM-RGBDI and EuRoC The performance of is far better than ORB-SLAM3, It can achieve centimeter accuracy in all sequences , Its disadvantage is that it consumes a lot of computing resources , I need two 3090 To run in real time ;NICE-SLAM It is the orientation of Zhejiang University SLAM Dynamic neural implicit scalable coding , Neural implicit is more suitable for rendering dense geometry ( such as IMAP, however Imap It's hard to deal with large scenes ,NICE-SLAM Can handle large scenes );TANDEM It shows good real-time 3D reconstruction performance .
summary : Traditional methods consume less resources , But the constructed map is relatively sparse ; The accuracy of the learning based method will be better , The map is also much denser , But the generalization ability is poor .

Vision SLAM It is sensitive to illumination and texture information , But laser SLAM It is unaffected ; General situation , laser SLAM Accuracy and robustness ratio in large scenes VSLAM Higher ; laser SLAM The disadvantage is , Difficult to relocate ( Cause drift )、 Build a sparse map 、 The high cost ;Cartographer In the paper, the test accuracy can reach 5cm even to the extent that 3cm; mechanical 3D Lidar can 360° rotate ; solid state 3D Laser radar is used most livox, But solid 3D Lidar has a fixed FOV;

Vision and laser fusion : Earlier work V-LOAM(2014, Non open source );
GNSS The fusion : In the outdoor scene, the global coordinates can be obtained to eliminate the drift ;
Event camera fusion : It can solve the problems of motion blur and overexposure of traditional cameras ;
Wheel speedometer fusion :VINS on wheels It solves the degradation problem in some scenes , At present, the scene has been very perfect .
The speaker believes that the most promising thing at present is GNSS and SLAM Fusion , because GNSS and SLAM Are very complex algorithms , And not many people do this .
2 Main stream SLAM Data set review

KITTI: It's old and there are few sensors ; Vision SLAM Generally, this data set is not used , And use TUM( hold RGBD) and EUROC( Unmanned aerial vehicle (uav) );
NCLT: Ground robot acquisition , Camera acquisition frequency is low , Fewer sensors ;
OpenLORIS: Ground robot acquisition , Camera internal and external parameters are not published ;gt The acquisition is not rigorous , By laser SLAM Ran out of ;
3 M2DGR Acquisition platform and environment

Effect drawing of data collection ;
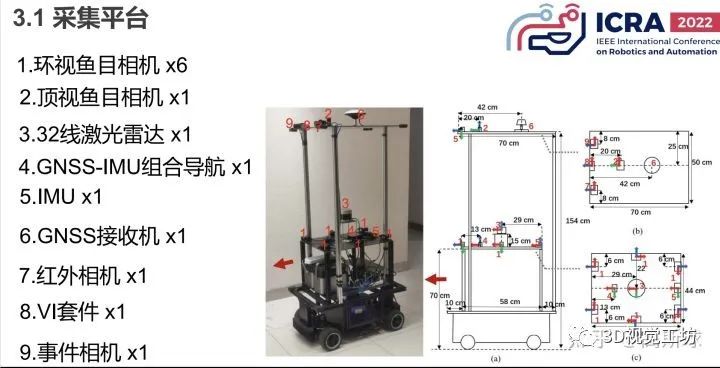
Acquisition platform , The specific equipment is as above ;.GNSS-IMU Integrated navigation is mainly used to collect outdoor RTK Signal as outdoor track gt;lidar It is connected to the laptop through the Internet port . IMU It adopts domestic consumer grade equipment (500-800rmb)

(a) The outdoor sequence is handed in for collection , These sequences are relatively long , The existing SLAM The effect of the algorithm running on it is not ideal , It belongs to a very challenging data set ;
(b)Roomdark It's in a completely dark scene , Used to compare ordinary cameras Performance of infrared camera and event camera ;
(c) The purpose is to test indoor and outdoor alternating SLAM Algorithm performance ;
(d) This sequence is also very challenging ;
4 Experimental evaluation and result analysis

It's on it 7 A representative sequence ;
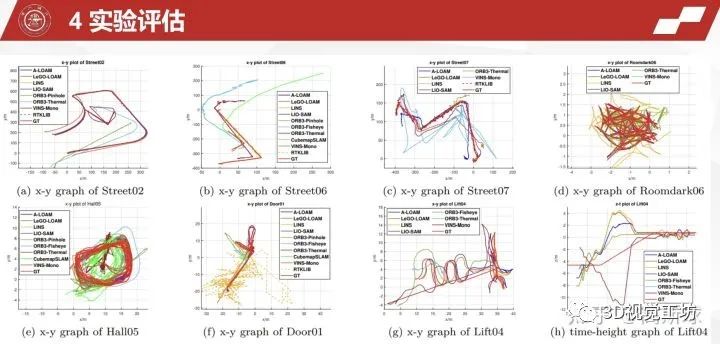
Visualization of positioning results ; The conclusion is : Spooky: ! The drift is very obvious .
5 Data set usage guide
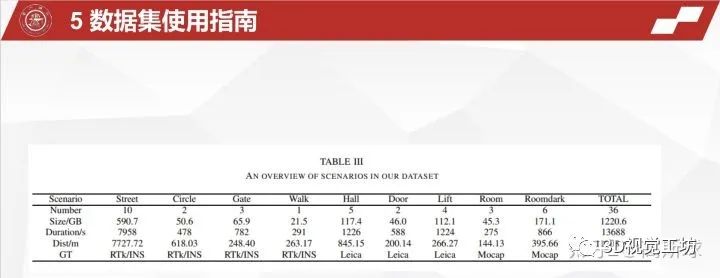
The information of several data sets is listed above .
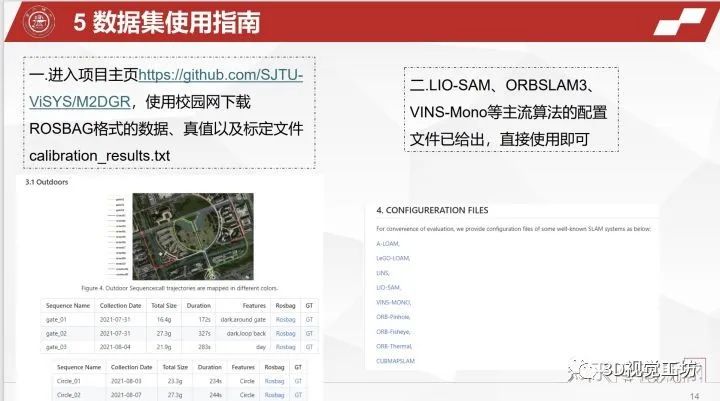
Students or teachers can connect to the campus network , You can achieve 10M/S .

VSLAM There is no absolute scale for a single purpose , Need to add - s (scale). If your algorithm can be more stable than the above SOTA Algorithm ( For example, your algorithm is better than orb-slam3 Higher than 2-3 rice ), congratulations , You can also send an article ICRA 了

The above is the process of using data sets . The author will keep the data set updated !
Q&A
1. Camera and IMU Calibration use calib , Good effect and simple calibration ;
2. Nine axis IMU Than six axis IMU It can collect more three-dimensional information .
3.KITTI Data set of IMU There may be a problem with the dataset , Not recommended KITTI Running vision SLAM The system of .
4.NUC 3000-5000 The performance of the left and right sides is not very good , It is recommended to use the top equipped NUC.
This article is only for academic sharing , If there is any infringement , Please contact to delete .
3D Visual workshop boutique course official website :3dcver.com
1. Multi sensor data fusion technology for automatic driving field
2. For the field of automatic driving 3D Whole stack learning route of point cloud target detection !( Single mode + Multimodal / data + Code )
3. Thoroughly understand the visual three-dimensional reconstruction : Principle analysis 、 Code explanation 、 Optimization and improvement
4. China's first point cloud processing course for industrial practice
5. laser - Vision -IMU-GPS The fusion SLAM Algorithm sorting and code explanation
6. Thoroughly understand the vision - inertia SLAM: be based on VINS-Fusion The class officially started
7. Thoroughly understand based on LOAM Framework of the 3D laser SLAM: Source code analysis to algorithm optimization
8. Thorough analysis of indoor 、 Outdoor laser SLAM Key algorithm principle 、 Code and actual combat (cartographer+LOAM +LIO-SAM)
10. Monocular depth estimation method : Algorithm sorting and code implementation
11. Deployment of deep learning model in autopilot
12. Camera model and calibration ( Monocular + Binocular + fisheye )
13. blockbuster ! Four rotor aircraft : Algorithm and practice
14.ROS2 From entry to mastery : Theory and practice
15. The first one in China 3D Defect detection tutorial : theory 、 Source code and actual combat
blockbuster !3DCVer- Academic paper writing contribution Communication group Established
Scan the code to add a little assistant wechat , can Apply to join 3D Visual workshop - Academic paper writing and contribution WeChat ac group , The purpose is to communicate with each other 、 Top issue 、SCI、EI And so on .
meanwhile You can also apply to join our subdivided direction communication group , At present, there are mainly 3D Vision 、CV& Deep learning 、SLAM、 Three dimensional reconstruction 、 Point cloud post processing 、 Autopilot 、 Multi-sensor fusion 、CV introduction 、 Three dimensional measurement 、VR/AR、3D Face recognition 、 Medical imaging 、 defect detection 、 Pedestrian recognition 、 Target tracking 、 Visual products landing 、 The visual contest 、 License plate recognition 、 Hardware selection 、 Academic exchange 、 Job exchange 、ORB-SLAM Series source code exchange 、 Depth estimation Wait for wechat group .
Be sure to note : Research direction + School / company + nickname , for example :”3D Vision + Shanghai Jiaotong University + quietly “. Please note... According to the format , Can be quickly passed and invited into the group . Original contribution Please also contact .

▲ Long press and add wechat group or contribute
▲ The official account of long click attention
3D Vision goes from entry to mastery of knowledge : in the light of 3D In the field of vision Video Course cheng ( 3D reconstruction series 、 3D point cloud series 、 Structured light series 、 Hand eye calibration 、 Camera calibration 、 laser / Vision SLAM、 Automatically Driving, etc )、 Summary of knowledge points 、 Introduction advanced learning route 、 newest paper Share 、 Question answer Carry out deep cultivation in five aspects , There are also algorithm engineers from various large factories to provide technical guidance . meanwhile , The planet will be jointly released by well-known enterprises 3D Vision related algorithm development positions and project docking information , Create a set of technology and employment as one of the iron fans gathering area , near 4000 Planet members create better AI The world is making progress together , Knowledge planet portal :
Study 3D Visual core technology , Scan to see the introduction ,3 Unconditional refund within days
There are high quality tutorial materials in the circle 、 Answer questions and solve doubts 、 Help you solve problems efficiently
Feel useful , Please give me a compliment ~
边栏推荐
- After 22 years in office, the father of PowerShell will leave Microsoft: he was demoted by Microsoft for developing PowerShell
- Leetcode(154)——寻找旋转排序数组中的最小值 II
- Leetcode 面试题 17.04. 消失的数字
- Matlab中弧度转角度、角度转弧度
- Leetcode interview question 17.01 Addition without plus sign
- 问题包含哪些环节
- Stratégie touristique d'été de Singapour: un jour pour visiter l'île de San taosha à Singapour
- 饭卡 HDU2546
- ESP32-C3入门教程 问题篇⑪——esp-tls: create_ssl_handle failed, tls_io_instance->options.trusted_certs null
- The student Tiktok publicized that his alma mater was roast about "reducing the seal of enrollment". Netizen: hahahahahahahaha
猜你喜欢

Distance measurement - Jaccard distance

Nm01 function overview and API definition of nm module independent of bus protocol
Comprendre complètement le tutoriel de traitement de Point Cloud basé sur open3d!

Esp32-c3 introductory tutorial question ⑩ - error: implicit declaration of function 'ESP_ blufi_ close‘;
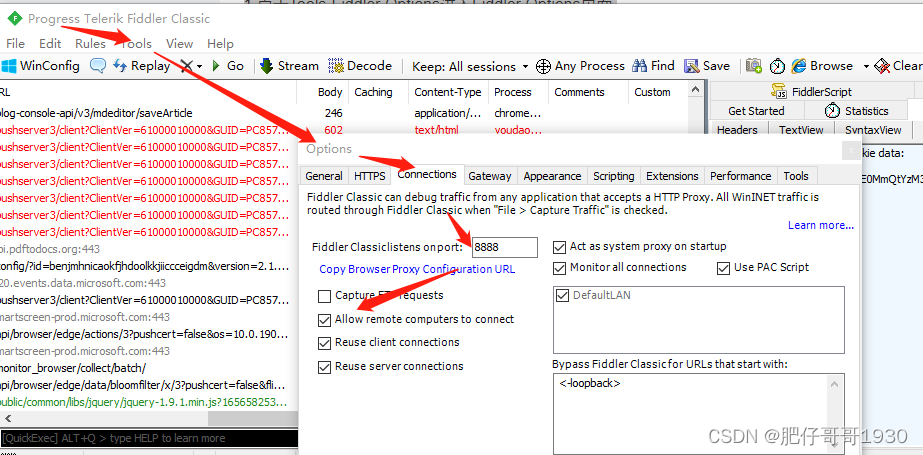
夜神模拟器+Fiddler抓包测试App
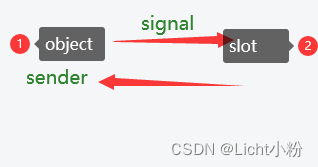
LightGroupButton* sender = static_cast<LightGroupButton*>(QObject::sender());
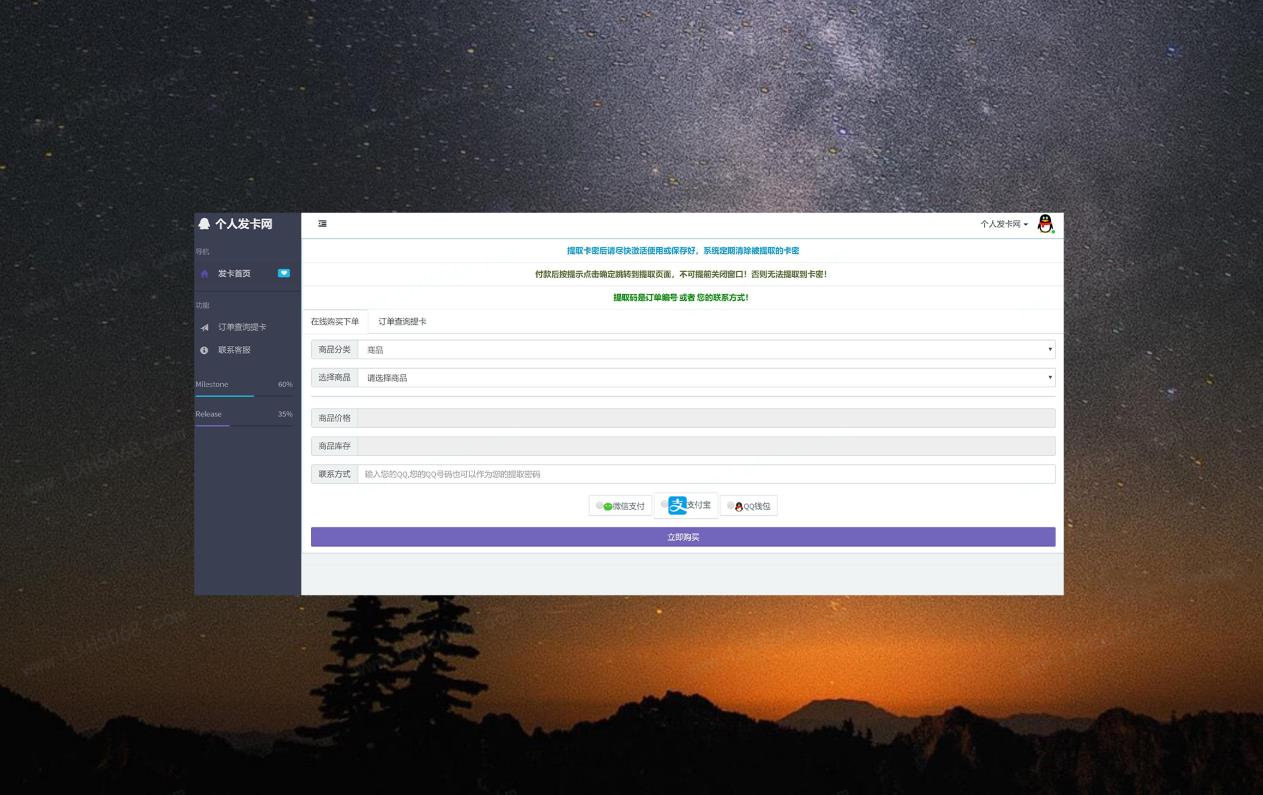
一款简约PHP个人发卡程序V4.0版本

再放寬!這些應届生,可直接落戶上海
再放宽!这些应届生,可直接落户上海
距离度量 —— 杰卡德距离(Jaccard Distance)
随机推荐
Three ways of function parameter transfer in C language
Meta universe chain game system development (logic development) - chain game system development (detailed analysis)
Leetcode interview question 16.15 Abacus wonderful calculation
Server PHP environment building tutorial, PHP server environment building graphic explanation
C语言中函数参数传递的三种方式
Qt Official examples: Qt Quick Controls - Gallery
What are the links of the problem
快速排序基本思路(通俗易懂+例子)「建议收藏」
“栈”的典型应用—表达式求值(C语言实现)
719. Find the distance of the number pair with the smallest K
The official docker image running container in version 1.5.1 can be set to use MySQL 8 driver?
SLAM|如何时间戳对齐?
What is cloud primordial? This time, I can finally understand!
Esp32-c3 introductory tutorial question ⑩ - error: implicit declaration of function 'ESP_ blufi_ close‘;
如何清理废弃pv和其对应的文件夹
【Oracle 期末复习】表空间、表、约束、索引、视图的增删改
新加坡暑假旅游攻略:一天玩转新加坡圣淘沙岛
故障排查:kubectl报错ValidationError: unknown field \u00a0
[Yugong series] July 2022 go teaching course 001 introduction to go language premise
Web版3D可视化工具,程序员应该知道的97件事,AI前沿论文 | 资讯日报 #2022.07.01