当前位置:网站首页>Source code and scheme for target recognition, detection and 6D attitude estimation (the most advanced method and data set)
Source code and scheme for target recognition, detection and 6D attitude estimation (the most advanced method and data set)
2022-06-12 08:59:00 【Softboy_ TM】
3D Accurate positioning and pose estimation of objects are very important for many higher-level tasks , For example, robot operation ( Such as
Amazon Picking Challenge)、 Scene interpretation and augmented reality . The recent introduction of consumer grade depth sensors has allowed for the traditional 2D The method is substantially improved , Because it can capture more detailed 3D Geometric features . However , There are still some challenges to be solved , Include : Foreground occlusion , The background is messy , Large scale and postural changes , Multiple instance objects !
【 So far this column 16 Chapter , subscribe 30+, Originality is not easy. , Subscribe to the source code solution 】
The scope of this article is to list the most advanced methods and data sets that can be used to further help drive research , Don't be wordy. Let's look at the effect below .
Advanced algorithms :( The connection on the right side is described in detail )
| title |
边栏推荐
- Construction of memcached cache service under Linux:
- 2024. 考试的最大困扰度-滑动窗口
- Judge whether the object is empty
- Loading circling effect during loading
- 2022.6.9-----leetcode.497
- RuntimeError:Input and parameter tensors are not at the same device, found input tensor at cuda:0 an
- ip、DNS、域名、URL、hosts
- 数据库不知道哪里出问题
- sql中的Exists用法
- (node:22344) [DEP0123] DeprecationWarning: Setting the TLS ServerName to an IP address is not permit
猜你喜欢

《MATLAB 神经网络43个案例分析》:第7章 RBF网络的回归--非线性函数回归的实现

Notes used by mqtt (combined with source code)
![Sword finger offer:[day 8 dynamic planning (simple)] --- > frog jumping on steps](/img/0a/65bc44850e52204af278e50a8f86eb.jpg)
Sword finger offer:[day 8 dynamic planning (simple)] --- > frog jumping on steps

Does database and table splitting cause reading diffusion problems? How to solve it?

Background attribute compound writing

Analysis of 43 cases of MATLAB neural network: Chapter 8 prediction of GRNN Network - Freight Volume Prediction Based on generalized regression neural network

【字符集九】gbk拷贝到Unicode会乱码?
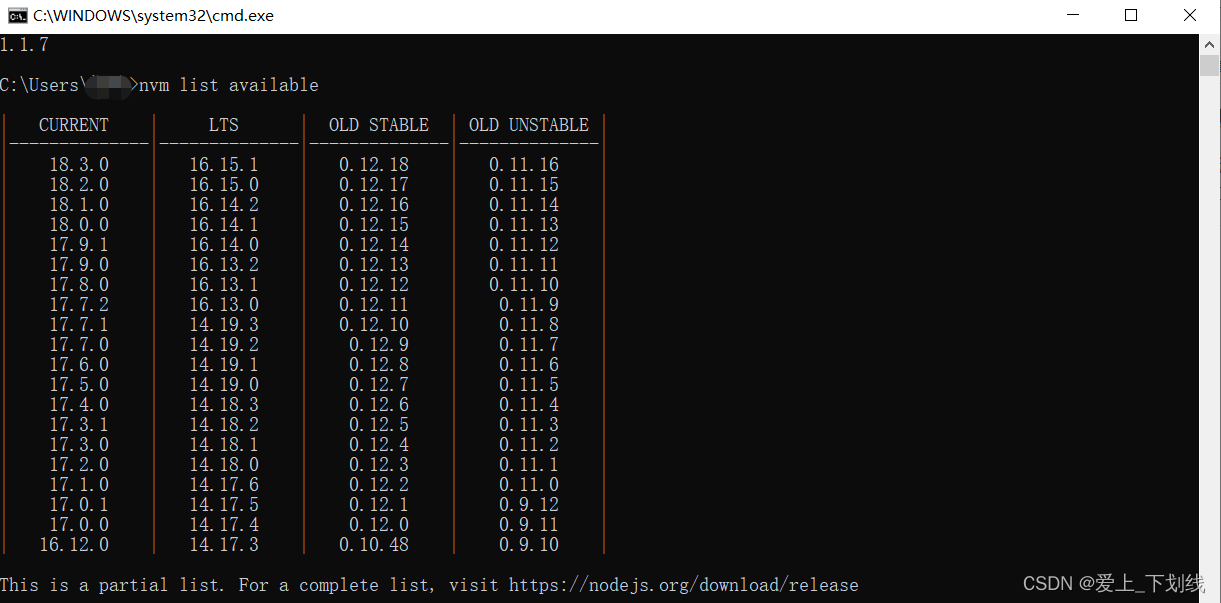
Use NVM to dynamically adjust the nodejs version to solve the problem that the project cannot be run and packaged because the node version is too high or too low

Redis installation test

Union selector
随机推荐
Oracle installation details (verification)
The difference between deep copy and shallow copy
[character set 8] char8_ t、char16_ t、char32_ t、wchar、char
Loading circling effect during loading
第五章-[bx]和Loop指令
ip、DNS、域名、URL、hosts
长安链节点证书、角色、权限管理介绍
《MATLAB 神經網絡43個案例分析》:第7章 RBF網絡的回歸--非線性函數回歸的實現
(node:22344) [DEP0123] DeprecationWarning: Setting the TLS ServerName to an IP address is not permit
Regular verification user name
【sklearn学习】LightGBM
(十四)InputField逻辑分析
List < string > sort
2022.6.11-----leetcode. nine hundred and twenty-six
【字符集九】gbk拷贝到Unicode会乱码?
Implementing architecture caching in MySQL under redis server environment
Construction of memcached cache service under Linux:
Knowledge points of 2022 system integration project management engineer examination: project cost management
Popular understanding of time domain sampling and frequency domain continuation
Make a simple page with the websql database of HTML5: