当前位置:网站首页>[coppeliasim] efficient conveyor belt
[coppeliasim] efficient conveyor belt
2022-07-06 02:12:00 【Ten year dream laboratory】
-- Efficient conveyor model script
function sysCall_init()
config={}
-- Modify following to customize your conveyor:
-----------------------------------------------
config.size={1,0.2,0.1} -- LWH
config.col1={0.2,0.2,0.2}-- Belt color
config.col2={0.5,0.5,0.5}-- Solid color
config.initPos=0-- initial position 0
config.initVel=0.1-- Initial speed 0.1
config.accel=1.5-- Initial acceleration 1.5
-----------------------------------------------
-- To command the conveyor externally or from another script, simply do:
--
-- sim.writeCustomDataBlock(conveyorHandle,'CONVMOV',sim.packTable({vel=0.1})) -- vel. ctrl
--
-- or:
--
-- sim.writeCustomDataBlock(conveyorHandle,'CONVMOV',sim.packTable({pos=0.1})) -- pos. ctrl
--
-- Its current position can be read with:
-- local data=sim.readCustomDataBlock(model,'CONVMOV')
--
-- if data then
-- local currentPos=data.currentPos
-- end
model=sim.getObjectHandle(sim.handle_self)-- Conveyor belt Model handle
visible1=sim.getObjectHandle('efficientConveyor_visible1')-- Visible models 1 Handle
visible2=sim.getObjectHandle('efficientConveyor_visible2')-- Visible models 2 Handle
forwarder=sim.getObjectHandle('efficientConveyor_forwarder')-- Forward handle
sim.setShapeColor(visible1,'',sim.colorcomponent_ambient_diffuse,config.col1)-- Set the color
sim.setShapeColor(visible2,'',sim.colorcomponent_ambient_diffuse,config.col2)-- Set the color
sim.setShapeBB(visible1,config.size)-- Set shape
sim.setShapeBB(visible2,{config.size[1]+0.005,config.size[2]+0.005,config.size[3]})-- Set shape x,y The direction is slightly larger
sim.setShapeBB(forwarder,config.size)-- Set shape size
sim.setObjectPosition(visible1,model,{0,0,-config.size[3]/2})-- Set the model location
sim.setObjectPosition(visible2,model,{0,0,-config.size[3]/2-0.0025})-- A little lower
sim.setObjectPosition(forwarder,model,{0,0,-config.size[3]/2})-- Model location
pos=config.initPos-- initial position
prevPos=pos-- Record the last position
targetVel=config.initVel-- Target speed : Initial speed
vel=0-- Last speed
accel=config.accel-- The acceleration
sim.writeCustomDataBlock(model,'CONVMOV',sim.packTable({currentPos=pos}))-- Set the conveyor position
end
function sysCall_afterSimulation()
pos=config.initPos -- After the simulation , Set location
prevPos=pos-- Update the previous location
targetVel=config.initVel-- Set to initial speed
vel=0-- Update the last speed
accel=config.accel-- Set to initial acceleration
sim.writeCustomDataBlock(model,'CONVMOV',sim.packTable({currentPos=pos}))-- Set the conveyor belt back to its initial position
end
function sysCall_actuation()
local dat=sim.readCustomDataBlock(model,'CONVMOV')-- Read belt data
local off
if dat then
dat=sim.unpackTable(dat)
if dat.offset then
off=dat.offset-- The offset of the conveyor belt required
end
if dat.vel then
targetVel=dat.vel-- Belt speed
end
if dat.accel then
accel=dat.accel-- Belt acceleration
end
end
local velErr=targetVel-vel-- Calculate the speed adjustment
local velErrAbs=math.abs(velErr)
local velErrSign=velErrAbs>1e-4 and velErr/velErrAbs or 1-- Direction of movement
if velErrAbs>1e-6 then
vel=vel+math.min(velErrAbs,accel*velErrSign*sim.getSimulationTimeStep())-- Update speed
end
if off or vel~=0 then-- Offset and speed is non-zero
if off then
pos=off-- Set the conveyor position to offset
else-- When there is no set offset, the position is calculated
pos=pos+vel*sim.getSimulationTimeStep()-- Calculate the conveyor position
end
setPos(pos)-- Update the conveyor position
end
if not dat then-- Data is empty
dat={}
end
dat.currentPos=pos-- Record the current position of the conveyor
sim.writeCustomDataBlock(model,'CONVMOV',sim.packTable(dat))-- Write data block Belt data
end
function setPos(p)
-- Here we "fake" the transportation pads with a single static rectangle that we dynamically reset
-- at each simulation pass (while not forgetting to set its initial velocity vector) :
-- ad locum , We use a single static rectangle that we reset dynamically “ forge ” Transport mat
-- During each simulation ( At the same time, don't forget to set its initial speed vector ):
local relativeLinearVelocity={(p-prevPos)/sim.getSimulationTimeStep(),0,0}-- Along x Direction relative to linear velocity
prevPos=pos-- Record the initial position
-- Reset the dynamic rectangle from the simulation (it will be removed and added again)
-- Reset the dynamic rectangle from the simulation ( It will be deleted and added again )
sim.resetDynamicObject(forwarder)
-- Compute the absolute velocity vector: Calculate the absolute velocity vector :
local m=sim.getObjectMatrix(forwarder,-1)-- Get the pose matrix of the forward rectangle , And set the position to 0
m[4]=0 -- Make sure the translation component is discarded
m[8]=0 -- Make sure the translation component is discarded
m[12]=0 -- Make sure the translation component is discarded
local absoluteLinearVelocity=sim.multiplyVector(m,relativeLinearVelocity)-- Absolute speed : From relative linear velocity to Move forward under the rectangular coordinate system .
-- Now set the initial velocity of the dynamic rectangle: Now set the initial speed of the dynamic rectangle :
sim.setObjectFloatParam(forwarder,sim.shapefloatparam_init_velocity_x,absoluteLinearVelocity[1])
sim.setObjectFloatParam(forwarder,sim.shapefloatparam_init_velocity_y,absoluteLinearVelocity[2])
sim.setObjectFloatParam(forwarder,sim.shapefloatparam_init_velocity_z,absoluteLinearVelocity[3])
end
边栏推荐
- Global and Chinese markets of general purpose centrifuges 2022-2028: Research Report on technology, participants, trends, market size and share
- Online reservation system of sports venues based on PHP
- Computer graduation design PHP college classroom application management system
- Minecraft 1.18.1、1.18.2模组开发 22.狙击枪(Sniper Rifle)
- [flask] official tutorial -part3: blog blueprint, project installability
- 【coppeliasim】6自由度路径规划
- Have a look at this generation
- Prepare for the autumn face-to-face test questions
- [eight part essay] what is the difference between unrepeatable reading and unreal reading?
- Leetcode3, implémenter strstr ()
猜你喜欢

1. Introduction to basic functions of power query
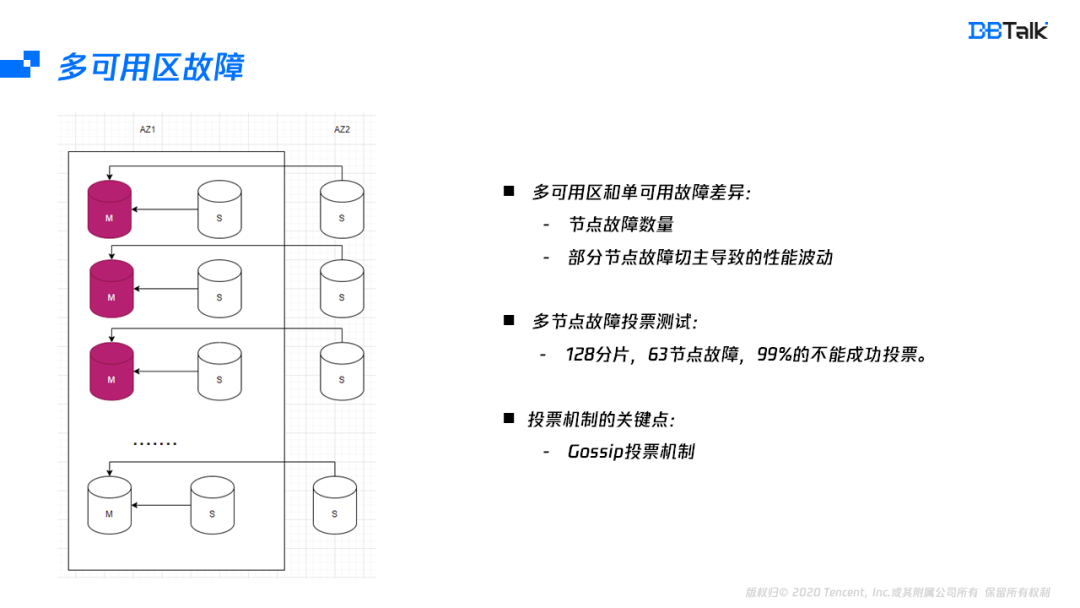
Redis如何实现多可用区?

国家级非遗传承人高清旺《四大美人》皮影数字藏品惊艳亮相!
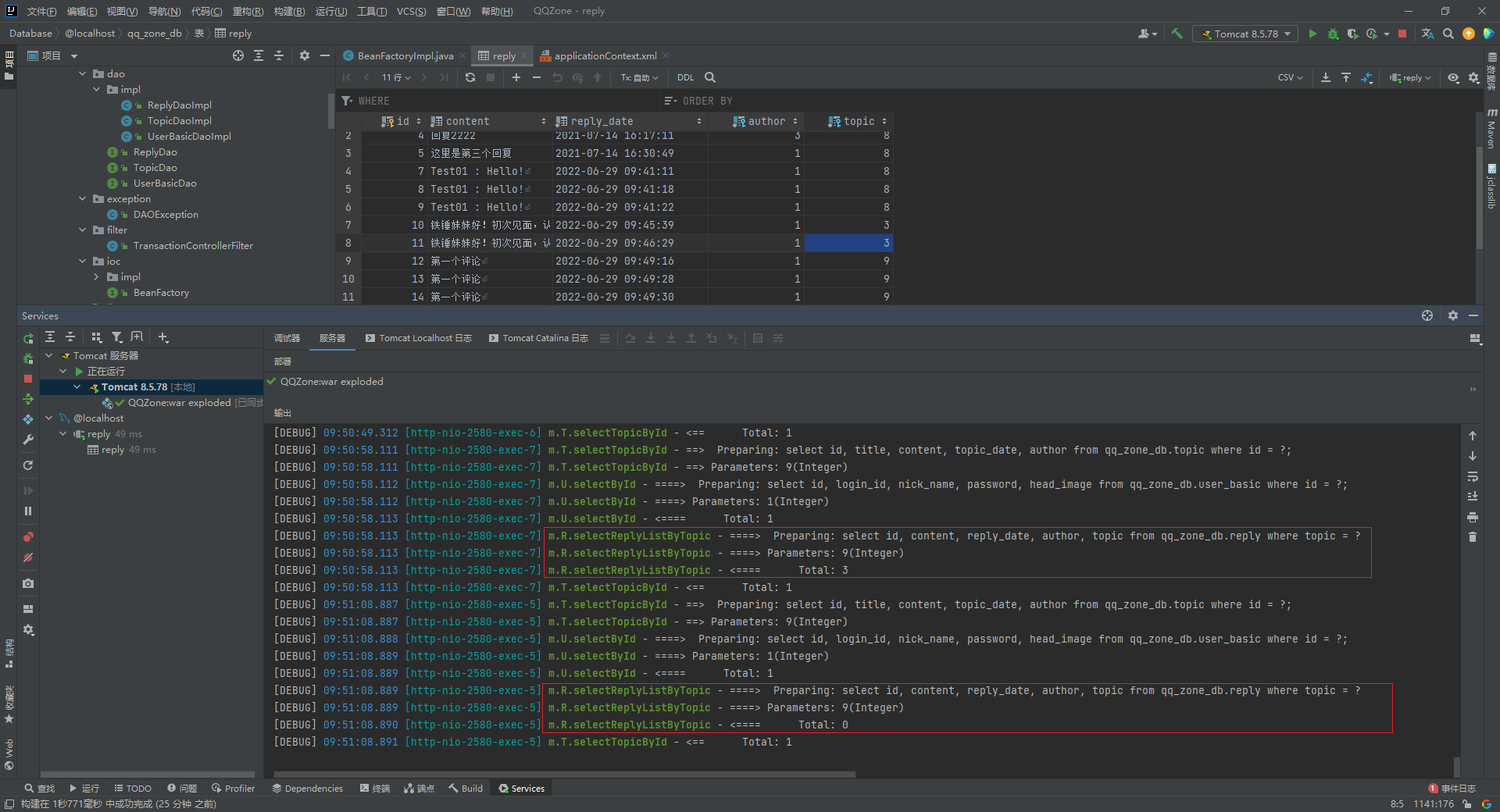
Executing two identical SQL statements in the same sqlsession will result in different total numbers
Jisuanke - t2063_ Missile interception

PHP campus movie website system for computer graduation design
Prepare for the autumn face-to-face test questions

Redis string type

Derivation of Biot Savart law in College Physics
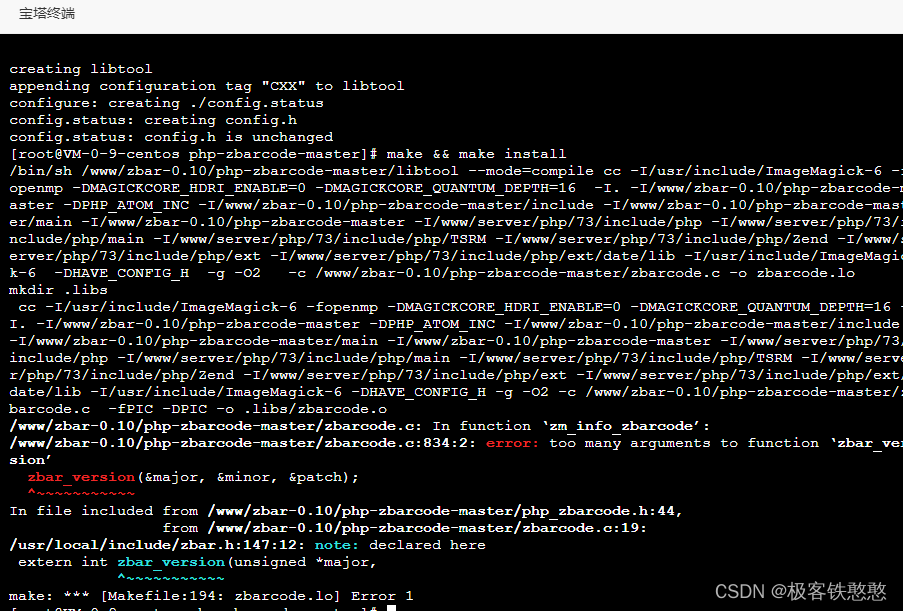
It's wrong to install PHP zbarcode extension. I don't know if any God can help me solve it. 7.3 for PHP environment
随机推荐
Unreal browser plug-in
Paddle框架:PaddleNLP概述【飛槳自然語言處理開發庫】
Sword finger offer 38 Arrangement of strings
729. 我的日程安排表 I / 剑指 Offer II 106. 二分图
A basic lintcode MySQL database problem
Redis-字符串类型
阿裏測開面試題
Visualstudio2019 compilation configuration lastools-v2.0.0 under win10 system
The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
[flask] static file and template rendering
Know MySQL database
Get the relevant information of ID card through PHP, get the zodiac, get the constellation, get the age, and get the gender
Leetcode sum of two numbers
Selenium waiting mode
MySQL lethal serial question 1 -- are you familiar with MySQL transactions?
Bidding promotion process
Global and Chinese markets of nasal oxygen tubes 2022-2028: Research Report on technology, participants, trends, market size and share
Multi function event recorder of the 5th National Games of the Blue Bridge Cup
国家级非遗传承人高清旺《四大美人》皮影数字藏品惊艳亮相!
[depth first search] Ji Suan Ke: Betsy's trip