当前位置:网站首页>LM small programmable controller software (based on CoDeSys) Note 23: conversion of relative coordinates of servo motor operation (stepping motor) to absolute coordinates
LM small programmable controller software (based on CoDeSys) Note 23: conversion of relative coordinates of servo motor operation (stepping motor) to absolute coordinates
2022-07-07 06:26:00 【Gutie_ bartholomew】
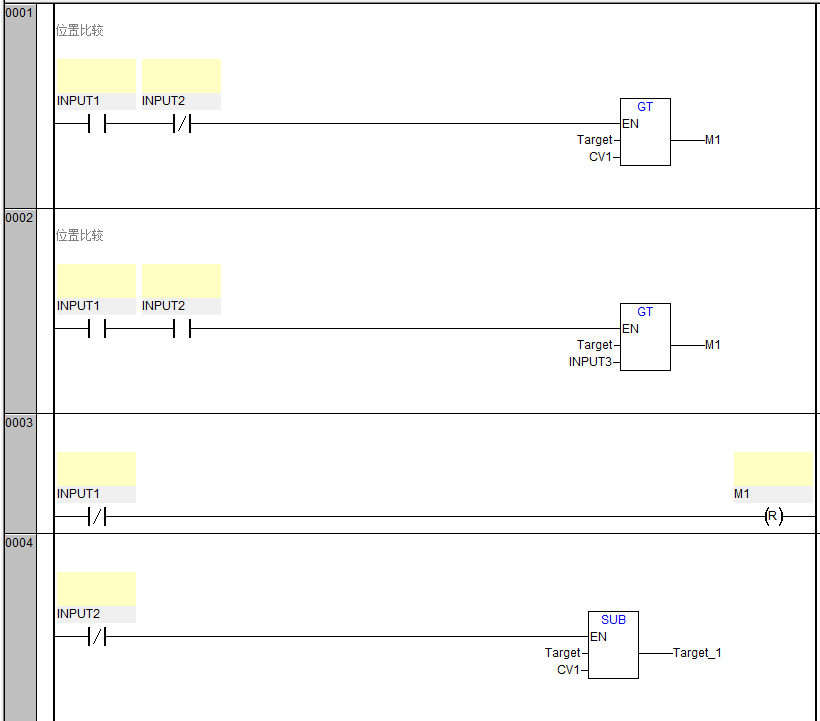
FUNCTION_BLOCK LSteppingMotor
VAR_INPUT
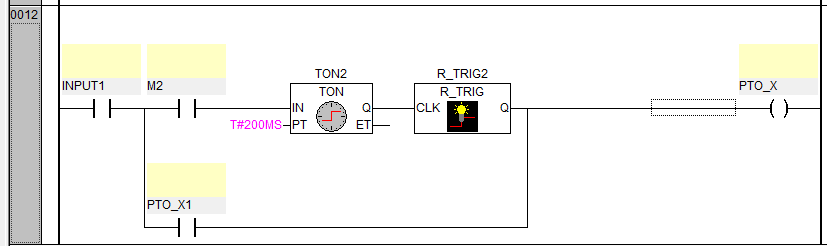
INPUT1: BOOL;(* Work sign *)
INPUT2: BOOL;(* Work sign *)
INPUT3: DINT;(* Work sign *)
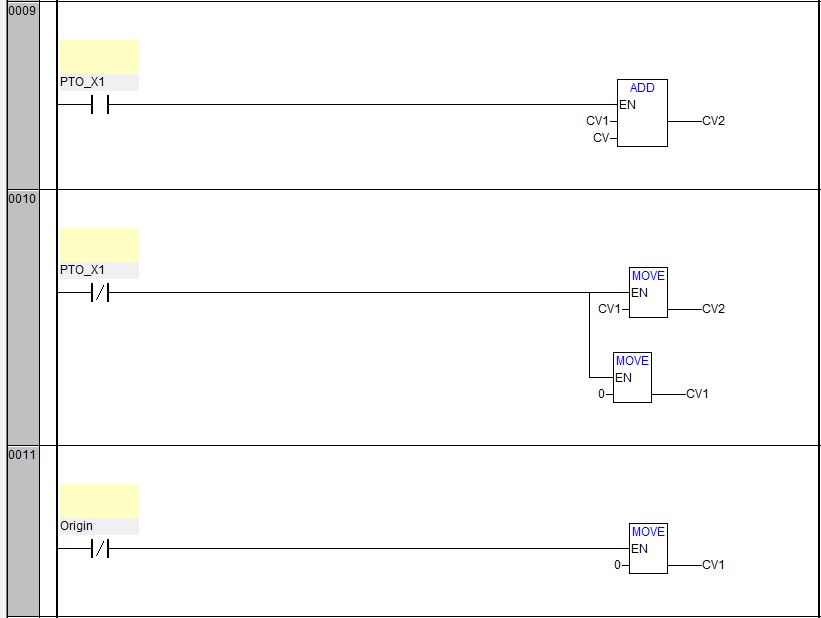
Origin: BOOL;(* origin *)
Axis:BYTE; (* Output selection ,1, QX0.0 2 QX0.3*)
Target:DINT; (* Target set point *)
VMax:DWORD; (* The highest frequency y*)
ACCTime:WORD; (* Acceleration and deceleration time (ms)*)
END_VAR
VAR_OUTPUT
OUT1: BOOL; (* Control direction *)
CV2: DINT; (* Coordinate value *)
PTO_X: BOOL;(**)
END_VAR
VAR
ADH164_PTO: ADH164_PTO;
EN_R:BOOL; (*enable bit*)
DIR_CTRL:BOOL; (*input connet with direction,don't use temporary*)
INT_EN:BOOL; (*interrupt enable bit *)
CV:DINT; (*pulse number have finished*)
Error:BYTE; (*error word*)
R_TRIG1: R_TRIG;
M1: BOOL;
TON1: TON;
Target_1: DINT;
m2: BOOL;
CV1: DINT;
PTO_X1: BOOL;
TON2: TON;
R_TRIG2: R_TRIG;
F_TRIG1: F_TRIG;
S2: BOOL;
M3: BOOL;
END_VAR
VAR RETAIN
Mode: BYTE := 1; (*motion mode*)
END_VAR

边栏推荐
- Swagger3 configuration
- 360 Zhiyu released 7.0 new products to create an exclusive "unified digital workspace" for the party, government and army, and central and state-owned enterprises
- JMeter's own functions are not enough? Why don't you develop one yourself
- VIM mapping large K
- 3428. 放苹果
- 蚂蚁庄园安全头盔 7.8蚂蚁庄园答案
- VMware安装后打开就蓝屏
- 安装mongodb数据库
- matlab / ENVI 主成分分析实现及结果分析
- 测试开发基础,教你做一个完整功能的Web平台之环境准备
猜你喜欢
Go straight to the 2022ecdc fluorite cloud Developer Conference: work with thousands of industries to accelerate intelligent upgrading
![[SOC FPGA] peripheral PIO button lights up](/img/34/58728bddbf91eb69e9c0062dbfd531.jpg)
[SOC FPGA] peripheral PIO button lights up
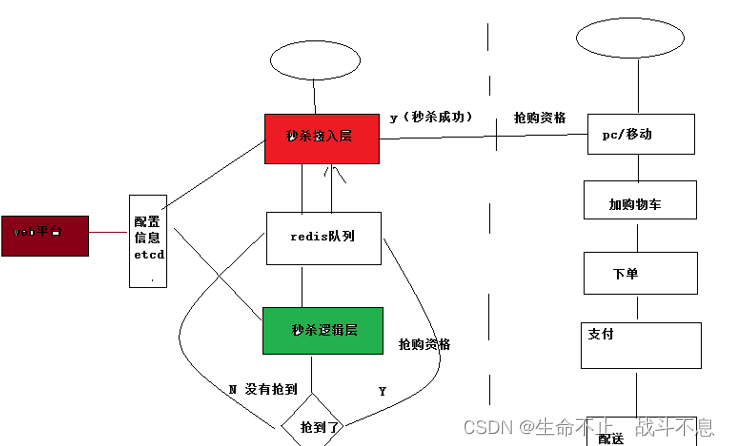
Ideas of high concurrency and high traffic seckill scheme
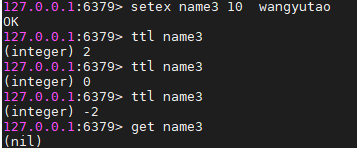
Redis (II) - redis General Command
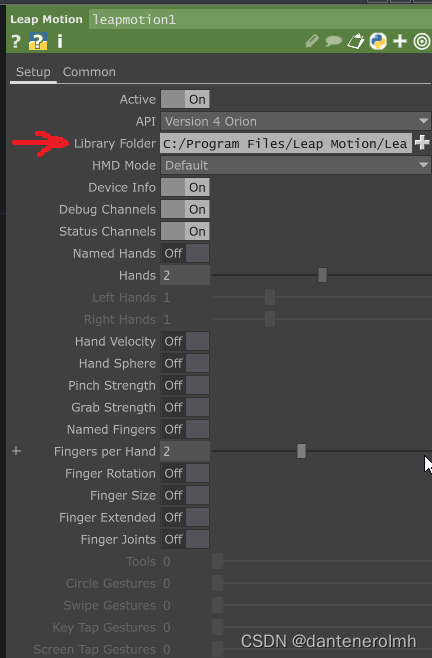
How to set up in touch designer 2022 to solve the problem that leap motion is not recognized?
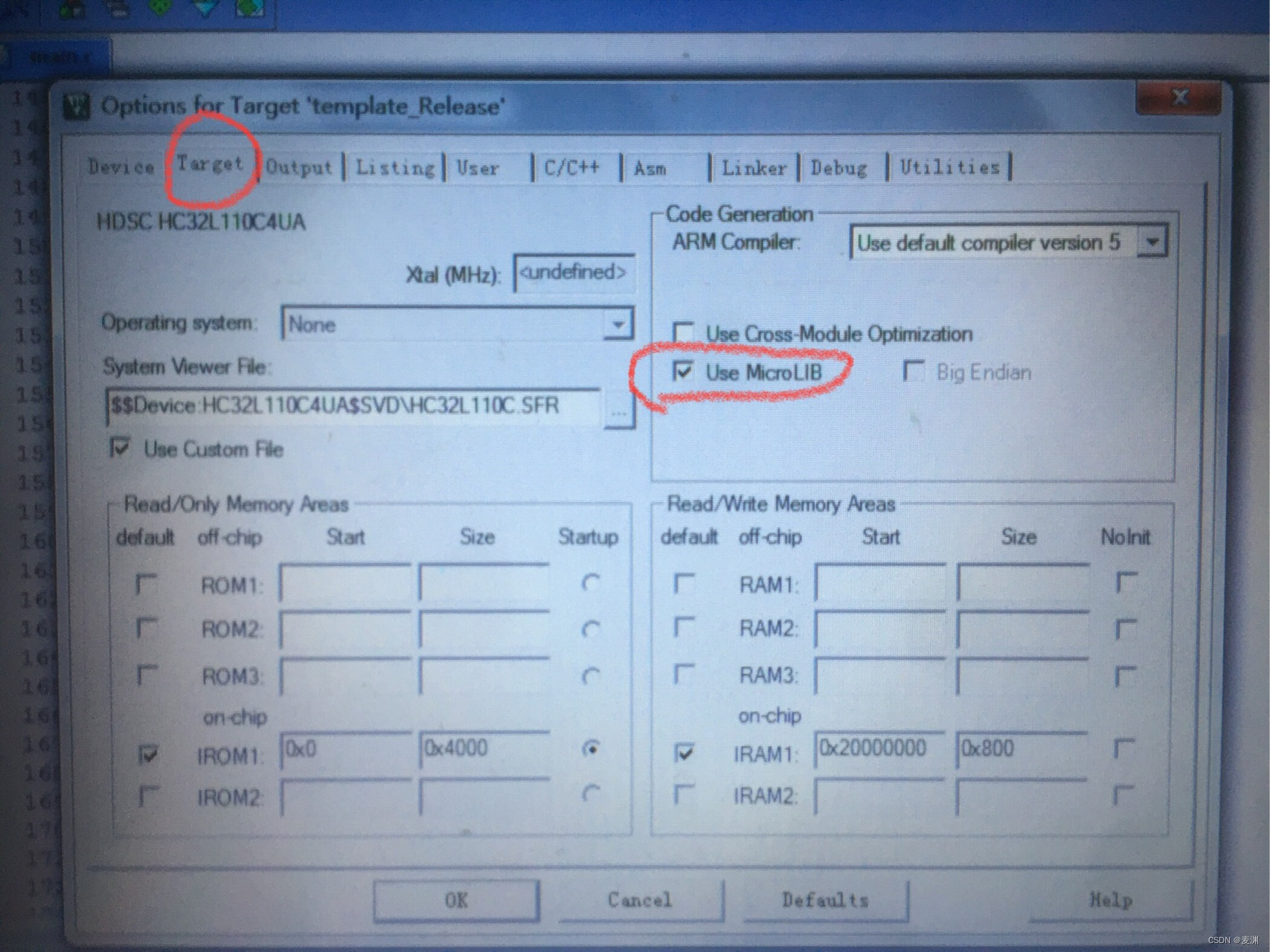
屏幕程序用串口无法调试情况
HKUST & MsrA new research: on image to image conversion, fine tuning is all you need
Redis(一)——初识Redis
软件测试的几个关键步骤,你需要知道

博士申请 | 上海交通大学自然科学研究院洪亮教授招收深度学习方向博士生
随机推荐
[FPGA] EEPROM based on I2C
程序员的日常 | 每日趣闻
The difference between string constants and string objects when allocating memory
ceres-solver和g2o性能比较
JVM in-depth
c面试 加密程序:由键盘输入明文,通过加密程序转换成密文并输出到屏幕上。
POI导出Excel:设置字体、颜色、行高自适应、列宽自适应、锁住单元格、合并单元格...
win系统下安装redis以及windows扩展方法
Crudini profile editing tool
测试开发基础,教你做一个完整功能的Web平台之环境准备
Markdown displays pictures side by side
postgresql 数据库 timescaledb 函数time_bucket_gapfill()报错解决及更换 license
Deep clustering: joint optimization of depth representation learning and clustering
【GNN】图解GNN: A gentle introduction(含视频)
Several key steps of software testing, you need to know
matlab / ENVI 主成分分析实现及结果分析
What are the classic database questions in the interview?
Force deduction 62 different paths (the number of all paths from the upper left to the lower right of the matrix) (dynamic planning)
学习笔记|数据小白使用DataEase制作数据大屏
2022Android面试必备知识点,一文全面总结