当前位置:网站首页>远端rostopic的本地rviz调用及显示
远端rostopic的本地rviz调用及显示
2022-07-03 06:18:00 【昼行plus】
假设
机器人的IP: 192.168.0.11 // remote computer (robot)
本地PC的IP: 192.168.0.111 // local computer Ubuntu (host)
查看IP地址的方法: 参考1,参考2
本地PC通过ssh链接远端机器人,如利用Mobaxterm或VSCode
在远端的命令行终端内输入如下命令:
export ROS_MASTER_URI=http://192.168.0.11:11311 //this ensures that we do not use localhost, but the real IP address as master node
export ROS_IP=192.168.0.11 //this ensures that ROS knows that we cannot use hostname directly (due to DHCP firewall issues)
然后
roscore
远端插上usb摄像头,参考ROS调用USB双目摄像头模组调用usb_cam,跑通后会有如下一堆topic: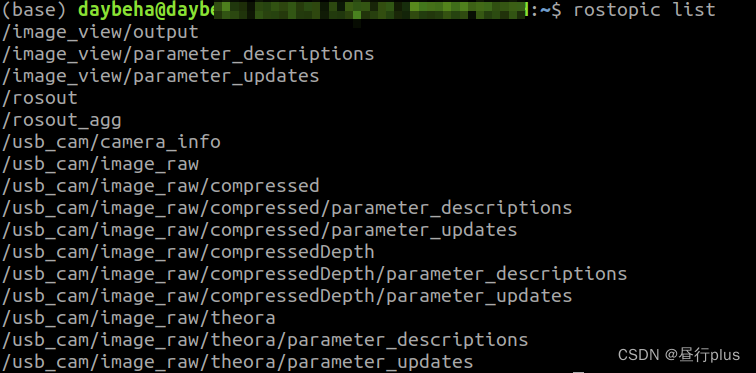
然后打开本地PC的终端,输入如下命令:
export ROS_MASTER_URI=http://192.168.0.11:11311 //tells local computer to look for the remote here
export ROS_IP=192.168.0.111 //this ensures that ROS knows that we cannot use hostname directly (due to DHCP firewall issues)
“11311”代表啥目前我还不清除…… 知道的大佬感谢您在评论区告诉我!
然后
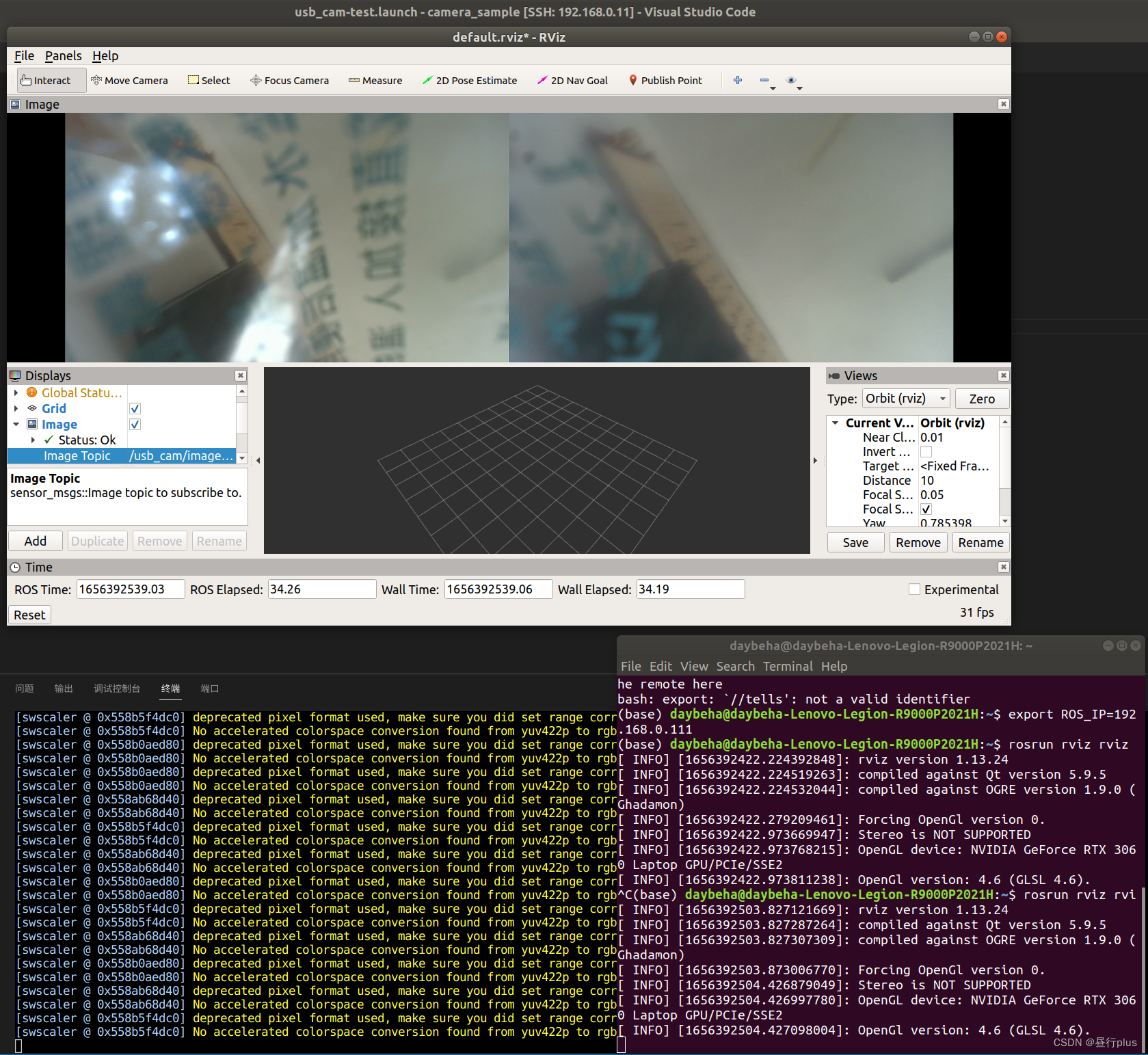
rosrun rviz rviz // fires up rviz on local computer. It will attach to the master node of the remote computer
使用上面export的方式每次打开一个终端都要输入一遍。
如果用的比较多,为了方便,也可以直接修改环境变量:
sudo gedit ~/.bashrc //add the two export commands at the end of the file.
source ~/.bashrc //and restart terminal
但是记得不需要的时候去掉上面export的命令!
Reference
ROS之旅(六)远端rviz监控
rviz远程桌面启动问题解决,多机器分布式本地运行rviz
Ubuntu查看IP地址
ubuntu查看ip地址命令(如何在 Ubuntu 中检查你的 IP 地址)
边栏推荐
- Multithreading and high concurrency (7) -- from reentrantlock to AQS source code (20000 words, one understanding AQS)
- Cesium entity(entities) 实体删除方法
- 认识弹性盒子flex
- 冒泡排序的简单理解
- Analysis of Clickhouse mergetree principle
- Docker advanced learning (container data volume, MySQL installation, dockerfile)
- 【C#/VB.NET】 将PDF转为SVG/Image, SVG/Image转PDF
- Clickhouse learning notes (2): execution plan, table creation optimization, syntax optimization rules, query optimization, data consistency
- 从小数据量 MySQL 迁移数据到 TiDB
- Kubernetes notes (VII) kuberetes scheduling
猜你喜欢

【系统设计】邻近服务
Method of converting GPS coordinates to Baidu map coordinates
YOLOV3学习笔记
Merge and migrate data from small data volume, sub database and sub table Mysql to tidb
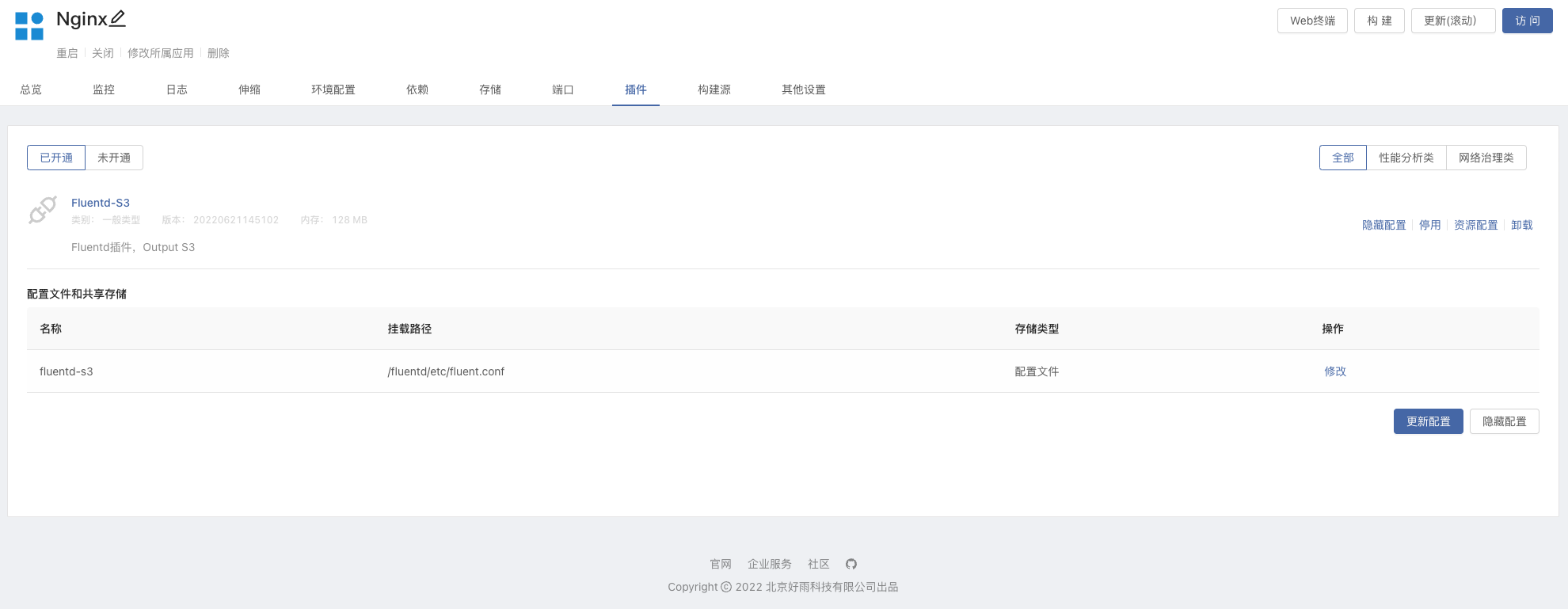
Fluentd facile à utiliser avec le marché des plug - ins rainbond pour une collecte de journaux plus rapide

Kubernetes notes (I) kubernetes cluster architecture

. Net program configuration file operation (INI, CFG, config)

ruoyi接口权限校验

Click cesium to obtain three-dimensional coordinates (longitude, latitude and elevation)
Simple solution of small up main lottery in station B
随机推荐
Use abp Zero builds a third-party login module (I): Principles
Oracle database synonym creation
Tabbar settings
轻松上手Fluentd,结合 Rainbond 插件市场,日志收集更快捷
YOLOV3学习笔记
智牛股项目--04
Apifix installation
项目总结--01(接口的增删改查;多线程的使用)
Important knowledge points of redis
[system design] proximity service
The most classic 100 sentences in the world famous works
Leetcode solution - 02 Add Two Numbers
Project summary --01 (addition, deletion, modification and query of interfaces; use of multithreading)
Nacos service installation
Svn branch management
项目总结--04
Clickhouse learning notes (I): Clickhouse installation, data type, table engine, SQL operation
使用conda创建自己的深度学习环境
Oauth2.0 - use database to store client information and authorization code
Request weather interface format, automation