当前位置:网站首页>Schnuka: machine vision positioning technology machine vision positioning principle
Schnuka: machine vision positioning technology machine vision positioning principle
2022-07-07 10:32:00 【Schnuka machine vision】
Now , We are already surrounded by all kinds of robots , Making 、 transport 、 Life and other fields play a very important role . For example, robot scooters , Sweeper robots, etc . And let these robots have a pair “ wisdom ” It is machine vision technology that eyes , Thanks to the planning and development of the robot industry , The application of machine vision technology has a very broad space .
Definition of machine vision Machine vision is a rapidly developing branch of artificial intelligence . In a nutshell , Machine vision is to use machines instead of human eyes to measure and judge . Machine vision is developed from the perspective of bionics , For example, the simulated eye collects images through visual sensors , After acquisition, the image processing system performs image processing and recognition .
Machine vision is mainly divided into three categories :
Monocular vision technology , That is to install a single camera for image acquisition , Generally, only two-dimensional images can be obtained . Monocular vision is widely used in the field of intelligent robots . However , Because this technology is limited by the problems of low image accuracy and data stability , Therefore, we need and ultrasound 、 Infrared and other types of sensors work together .
Binocular vision technology , It is a way of simulating human eyes to process environmental information , Collect one or more images with different perspectives from the outside through two cameras , So as to establish the three-dimensional coordinates of the measured object . Binocular vision technology can be roughly divided into robot arm vision control 、 Vision control of mobile robot 、 Unmanned aerial vehicles, unmanned ships, visual control and other directions .
Multi vision technology , It refers to the use of multiple cameras to reduce blind areas , Reduce the probability of error detection . This technology is mainly used for the motion measurement of objects . In the hand eye coordination of manipulator , Multi vision technology can overcome the blind area of object capture , Make the manipulator grasp more effectively . In the field of industrial robot assembly , Multi vision can also accurately identify and locate the measured object , And then improve the intelligence and positioning accuracy of the assembly robot .
Application of machine vision
The application of machine vision mainly includes detection and robot vision :
⒈ testing : It can also be divided into high-precision quantitative detection ( For example, the classification of cells in micrographs 、 Measurement of dimensions and positions of mechanical parts ) And qualitative or semi quantitative detection without measuring instrument ( For example, product appearance inspection 、 Component identification and positioning on the assembly line 、 Defect detection and assembly completeness detection ).
⒉ Robot vision : It is used to guide the operation and action of the robot in a large range , For example, pick up the workpiece from the disordered workpiece pile sent out by the hopper and place it on the conveyor belt or other equipment according to a certain orientation ( That is, the hopper picking problem ). As for small-scale operations and actions , It also needs the help of tactile sensing technology .
In addition, there is automatic optical inspection , Face recognition , Driverless car , Product quality grade classification , Automatic inspection of print quality , Character recognition , Texture recognition , Tracking location . The application of machine vision technology has replaced manual sorting and express delivery , Greatly improved efficiency . besides , Machine vision technology can also make robots have 3D Visual ability , Rely on visual guidance 、 location , Clamp product . And in automobile manufacturing 、 Medical and other fields also use machine vision system for measurement and detection .
As industrial 4.0 Coming of age , Machine vision plays an increasingly important role in the field of Intelligent Manufacturing , How machine vision technology works 、 Why is it the right choice to realize process automation and quality improvement .
Machine vision technology , It is a subject involving artificial intelligence 、 Neurobiology 、 Psychophysics 、 Computer science 、 The image processing 、 Pattern recognition and many other fields of interdisciplinary . Machine vision mainly uses computer to simulate human visual function , Extract information from the images of objective things , To deal with and understand , It's finally used for actual testing 、 Measurement and control . The biggest feature of machine vision technology is its high speed 、 A lot of information 、 Multi function .
边栏推荐
- 【实战】霸榜各大医学分割挑战赛的Transformer架构--nnFormer
- 原型与原型链
- 【二开】【JeecgBoot】修改分页参数
- Socket通信原理和实践
- 多线程-异步编排
- 字符串格式化
- [牛客网刷题 Day6] JZ27 二叉树的镜像
- When there are pointer variable members in the custom type, the return value and parameters of the assignment operator overload must be reference types
- A small problem of bit field and symbol expansion
- 【剑指Offer】42. 栈的压入、弹出序列
猜你喜欢

1321:【例6.3】删数问题(Noip1994)

openinstall与虎扑达成合作,挖掘体育文化产业数据价值

CAS机制

优雅的 Controller 层代码
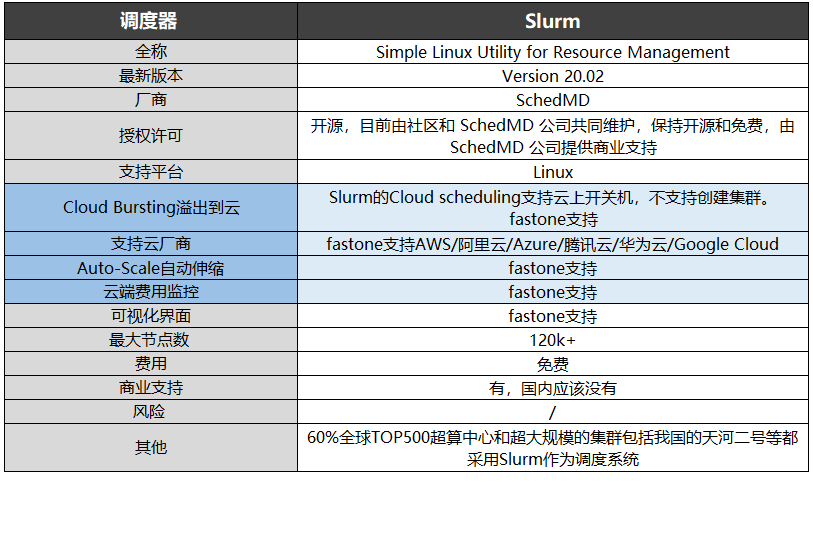
基于HPC场景的集群任务调度系统LSF/SGE/Slurm/PBS
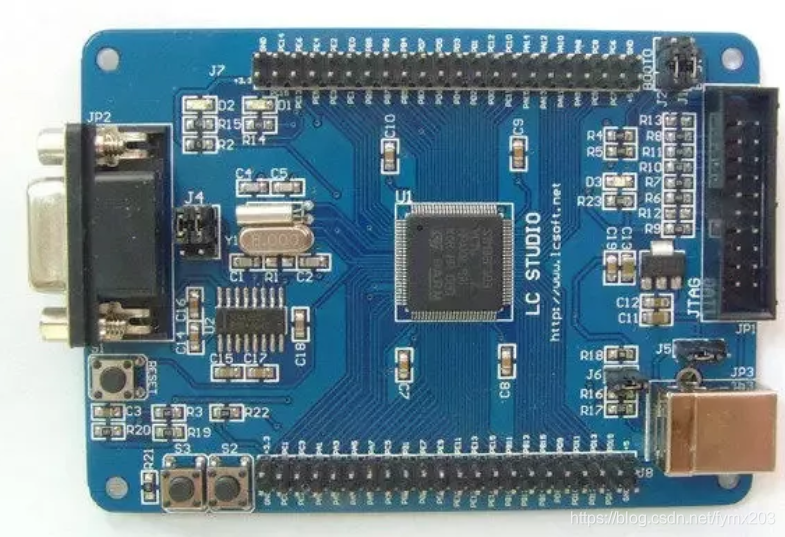
This article explains the complex relationship between MCU, arm, muc, DSP, FPGA and embedded system

P1223 排队接水/1319:【例6.1】排队接水
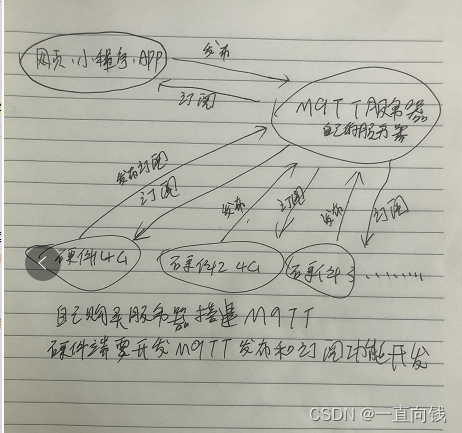
Several schemes of building hardware communication technology of Internet of things
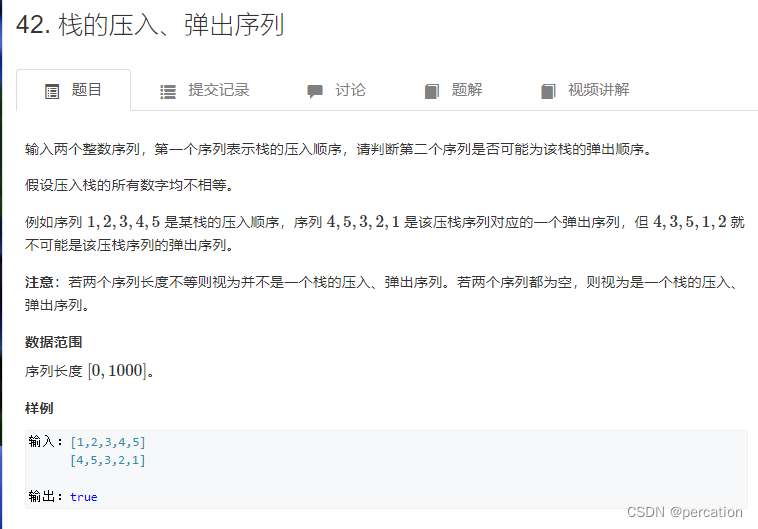
【剑指Offer】42. 栈的压入、弹出序列
Talking about the return format in the log, encapsulation format handling, exception handling
随机推荐
施努卡:机器视觉定位技术 机器视觉定位原理
JS实现链式调用
Socket communication principle and Practice
Pdf document signature Guide
Hdu-2196 tree DP learning notes
STM32 ADC和DMA
Multithreaded asynchronous orchestration
Encrypt and decrypt stored procedures (SQL 2008/sql 2012)
MySQL insert data create trigger fill UUID field value
TypeScript 接口继承
2022.7.6DAY598
1323:【例6.5】活动选择
P1031 [NOIP2002 提高组] 均分纸牌
@Transcation的配置,使用,原理注意事项:
2022.7.4DAY596
[email protected] can help us get the log object quickly
IO model review
String formatting
关于hzero-resource报错(groovy.lang.MissingPropertyException: No such property: weight for class)
【作业】2022.7.6 写一个自己的cal函数