当前位置:网站首页>(四)旋转物体检测数据roLabelImg转DOTA格式
(四)旋转物体检测数据roLabelImg转DOTA格式
2022-08-05 05:54:00 【恒友成】
欢迎访问个人网络日志知行空间
roLabelImg 工具仓库地址:https://github.com/cgvict/roLabelImg
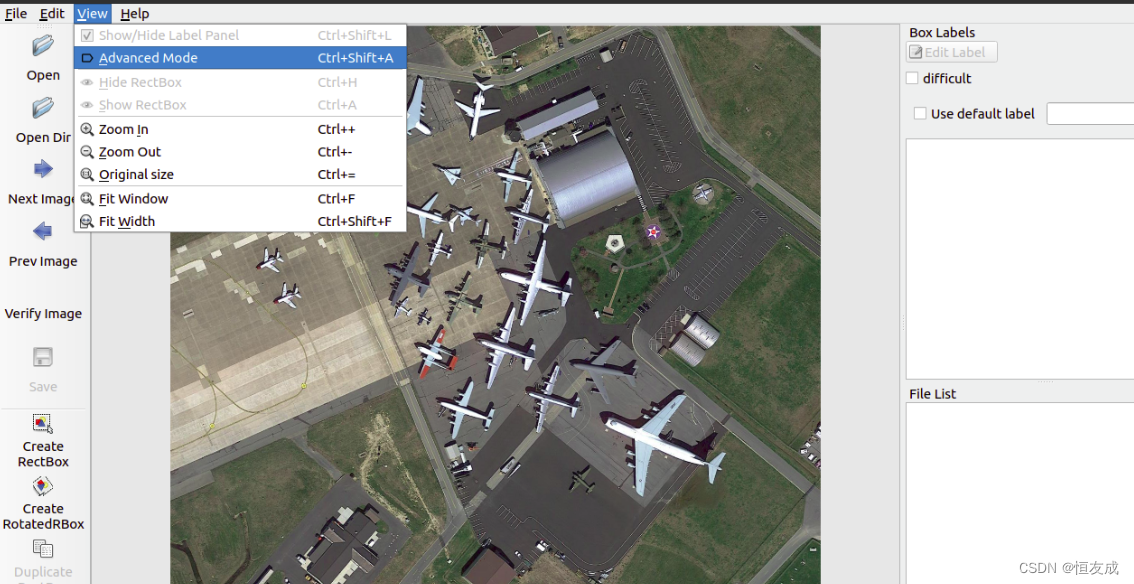
1.进入可以画旋转检测框的模式
2.标注文件样式
roLabelImg标注旋转检测框时是先画一个常规的矩形框,然后绕矩形的中心点顺时针和逆时针旋转一定的角度来实现的。标注文件中对旋转检测框的定义是使用(cx, cy, width, height, angle)的格式定义的,如下:
<robndbox>
<cx>1178.4388</cx>
<cy>1004.6478</cy>
<w>319.635</w>
<h>273.2016</h>
<angle>0.46</angle>
</robndbox>
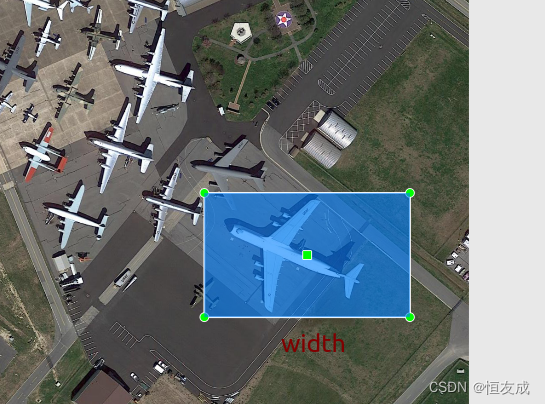
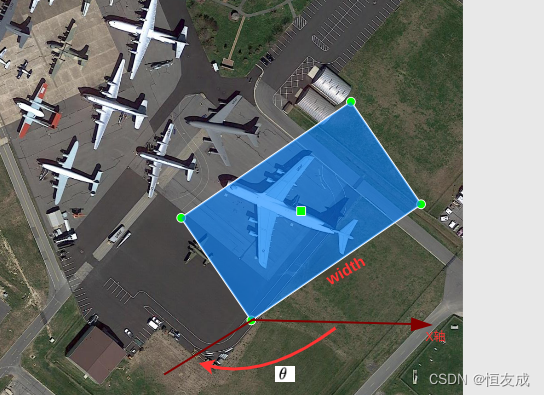
(cx, cy)是旋转框的中心点像素坐标,w的定义是在roLabelImg中画初始矩形框时在图像x方向上的边长, 另一条边是h,画好初始矩形后,无论后续如何旋转,w和h所指的边都不会变。angle角的定义是旋转矩形检测框的w边和X轴正方向顺时针所成的角度,其大小为[0,pi)
初始矩形检测框:
调整姿态后检测框:
3.DOTA数据格式
DOTA是武汉大学开源的旋转物体检测数据集,其主页见https://captain-whu.github.io/DOTA/dataset.html。DOTA标注文件的格式为:
x1, y1, x2, y2, x3, y3, x4, y4, category, difficult
(x1, y1, x2, y2, x3, y3, x4, y4)分别是旋转物体检测框的四个顶点的坐标,category是检测框物体对象的类别
4.roLabelImg标注文件转DOTA格式
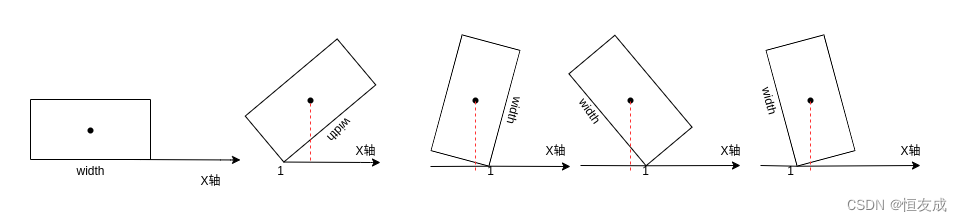
大多数旋转物体检测的开源算法的数据处理部分都支持DOTA格式,如商汤开源的mmrotate,为了更快的在自己数据集上验证算法的有效性,最方便的算法就是将roLabelImg标注的xml文件转成上述的标签格式,roLabelImg标注文件转DOTA可分成四种情况。
- 1) θ ∈ ( π / 2 , π ) \theta \in (\pi/2, \pi) θ∈(π/2,π),且中心点C落在点1右侧
- 2) θ ∈ ( π / 2 , π ) \theta \in (\pi/2, \pi) θ∈(π/2,π),且中心点C落在点1左侧
- 3) θ ∈ [ 0 , π / 2 ] \theta \in [0, \pi/2] θ∈[0,π/2],且中心点C落在点1左侧
- 4) θ ∈ [ 0 , π / 2 ] \theta \in [0, \pi/2] θ∈[0,π/2],且中心点C落在点1右侧
以 θ ∈ ( π / 2 , π ) \theta \in (\pi/2, \pi) θ∈(π/2,π),且中心点C落在点1右侧为例,
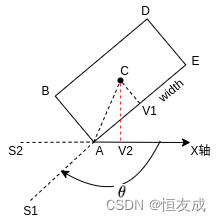
A(x1, y1),B(x3, y3),D(x2, y2),E(x4, y4)点的坐标由上述三角形之间的关系可以求得:
β = ∠ C A V 2 = a r c t a n h w + π − θ \beta = \angle CAV_2 = arctan\frac{h}{w}+ \pi - \theta β=∠CAV2=arctanwh+π−θ
d = w 6 2 + h 2 2 d = \frac{\sqrt{w^62+h^2}}{2} d=2w62+h2
x 1 = c x − d c o s β y 1 = c y + d s i n β x 2 = c x + d c o s β y 2 = c y − d s i n β x 3 = x 1 − h c o s ( θ − π 2 ) y 4 = y 1 − h s i n ( θ − π 2 ) x 4 = x 2 + h c o s ( θ − π 2 ) y 4 = y 2 + h s i n ( θ − π 2 ) x1 = cx - d cos\beta \\ y1 = cy + d sin\beta \\ x2 = cx + d cos\beta \\ y2 = cy - d sin\beta \\ x3 = x1 - hcos(\theta - \frac{\pi}{2}) \\ y4 = y1 - hsin(\theta - \frac{\pi}{2}) \\ x4 = x2 + hcos(\theta - \frac{\pi}{2}) \\ y4 = y2 + hsin(\theta - \frac{\pi}{2}) x1=cx−dcosβy1=cy+dsinβx2=cx+dcosβy2=cy−dsinβx3=x1−hcos(θ−2π)y4=y1−hsin(θ−2π)x4=x2+hcos(θ−2π)y4=y2+hsin(θ−2π)
同样可以求其他三种情况。
转换代码见:
def convert_rolabelimg2dota(xml_path:str) -> None:
""" Args: - `xml_path` (str) : path to roLabelImg label file, like /xx/xx.xml Returns: - `box_points` (list): shape (N, 8 + 1), N is the number of objects, 8 + 1 is \ `(x1, y1, x2, y2, x3, y3, x4, y4, class_name)` """
with open(xml_path) as f:
tree = ET.parse(f)
root = tree.getroot()
size = root.find('size')
width = int(size.find('width').text)
height = int(size.find('height').text)
objects = root.iter('object')
boxes = [] # list of tuple(cz, cy, w, h, angle), angle is in [0-pi)
for obj in objects:
if obj.find('type').text == 'robndbox':
rbox_node = obj.find('robndbox')
cat = obj.find('name').text
rbox = dict()
for key in ['cx', 'cy', 'w', 'h', 'angle']:
rbox[key] = float(rbox_node.find(key).text)
boxes.append(list((*rbox.values(), cat)))
print(f"bboxes: {
boxes}")
box_points = [] # list of box defined with four vertices
for box in boxes:
cx, cy, w, h, ag, cat = box
alpha_w = math.atan(w / h)
alpha_h = math.atan(h / w)
d = math.sqrt(w**2 + h**2) / 2
if ag > math.pi / 2:
beta = ag - math.pi / 2 + alpha_w
if beta <= math.pi / 2:
x1, y1 = cx + d * math.cos(beta), cy + d * math.sin(beta)
x2, y2 = cx - d * math.cos(beta), cy - d * math.sin(beta)
elif beta > math.pi / 2:
beta = math.pi - beta
x1, y1 = cx - d * math.cos(beta), cy + d * math.sin(beta)
x2, y2 = cx + d * math.cos(beta), cy - d * math.sin(beta)
x3, y3 = x1 - h * math.cos(ag - math.pi / 2), y1 - h * math.sin(ag - math.pi / 2)
x4, y4 = x2 + h * math.cos(ag - math.pi / 2), y2 + h * math.sin(ag - math.pi / 2)
elif ag <= math.pi / 2:
beta = ag + alpha_h
if beta <= math.pi / 2:
x1, y1 = cx + d * math.cos(beta), cy + d * math.sin(beta)
x2, y2 = cx - d * math.cos(beta), cy - d * math.sin(beta)
elif beta > math.pi / 2:
beta = math.pi - beta
x1, y1 = cx - d * math.cos(beta), cy + d * math.sin(beta)
x2, y2 = cx + d * math.cos(beta), cy - d * math.sin(beta)
x3, y3 = x1 - w * math.cos(ag), y1 - w * math.sin(ag)
x4, y4 = x2 + w * math.cos(ag), y2 + w * math.sin(ag)
points = np.array([x1, y1, x3, y3, x2, y2, x4, y4], dtype=np.int32)
points[0::2] = np.clip(points[0::2], 0, width)
points[1::2] = np.clip(points[1::2], 0, height)
box_points.append([*points, cat])
return box_points
完整代码见gitee仓库object_detection_task
参考资料
边栏推荐
- 2022杭电多校六 1007-Shinobu loves trip(同余方程)
- After docker is deployed, mysql cannot connect
- ## 简讲protobuf-从原理到使用
- numpy.random usage documentation
- 淘宝客APP带自营商城本地生活CPS外卖优惠电影票话费更新渠道跟单生活特权V3
- Successful indie developers deal with failure & imposters
- 技术分析模式(九)三重顶部和底部
- js 使用雪花id生成随机id
- 获取预训练模型的网络输入尺寸
- Come, come, let you understand how Cocos Creator reads and writes JSON files
猜你喜欢
![In-depth analysis if according to data authority @datascope (annotation + AOP + dynamic sql splicing) [step by step, with analysis process]](/img/b5/03f55bb9058c08a48eae368233376c.png)
In-depth analysis if according to data authority @datascope (annotation + AOP + dynamic sql splicing) [step by step, with analysis process]
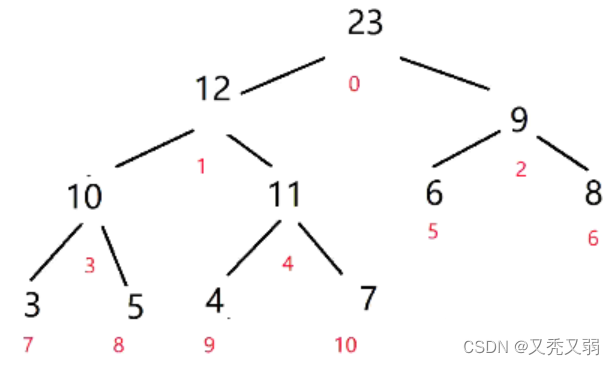
八大排序之堆排序
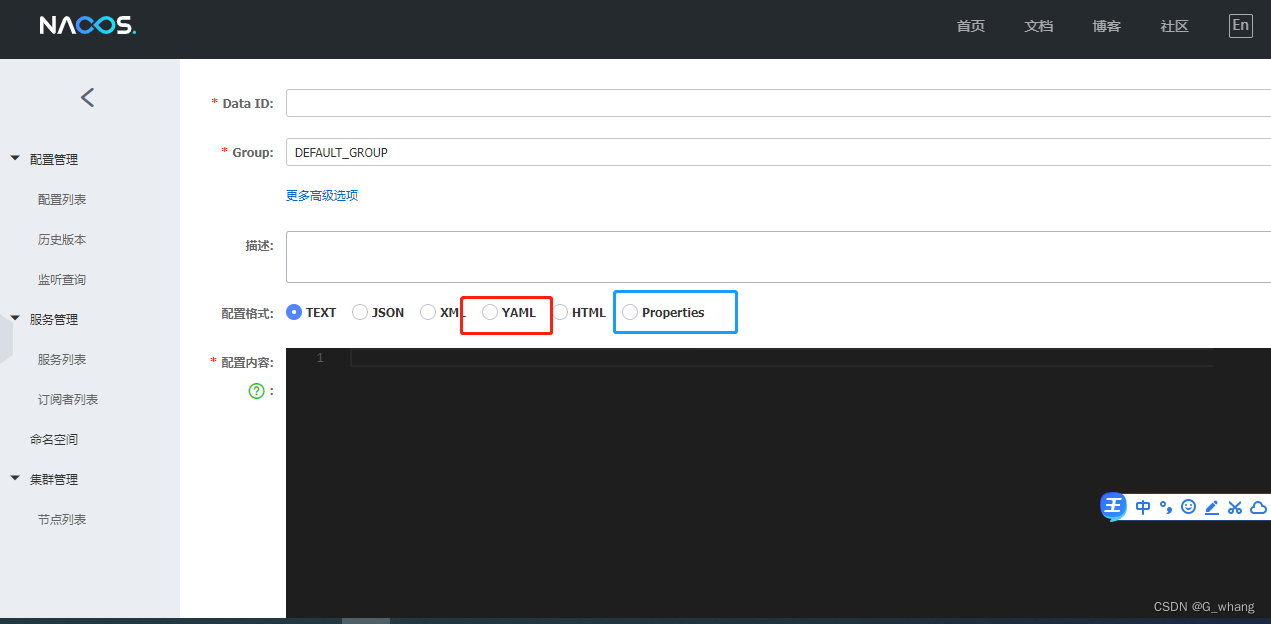
NACOS配置中心设置配置文件
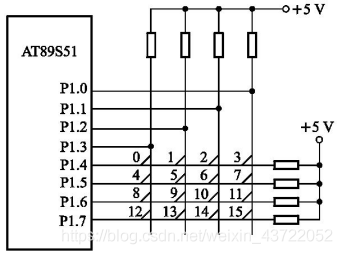
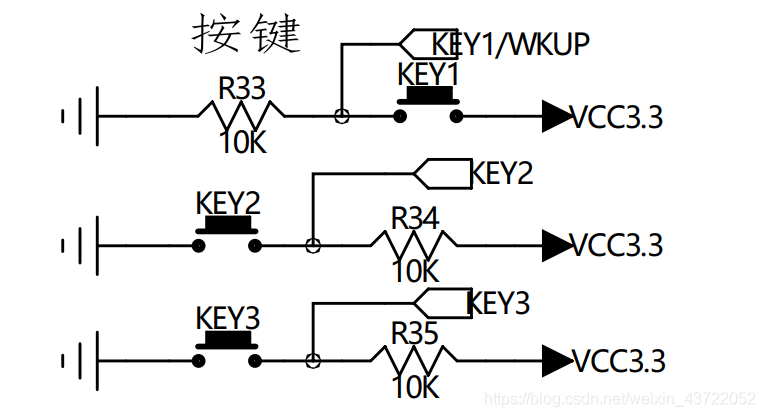
单片机原理与应用复习
DevOps process demo (practical record)
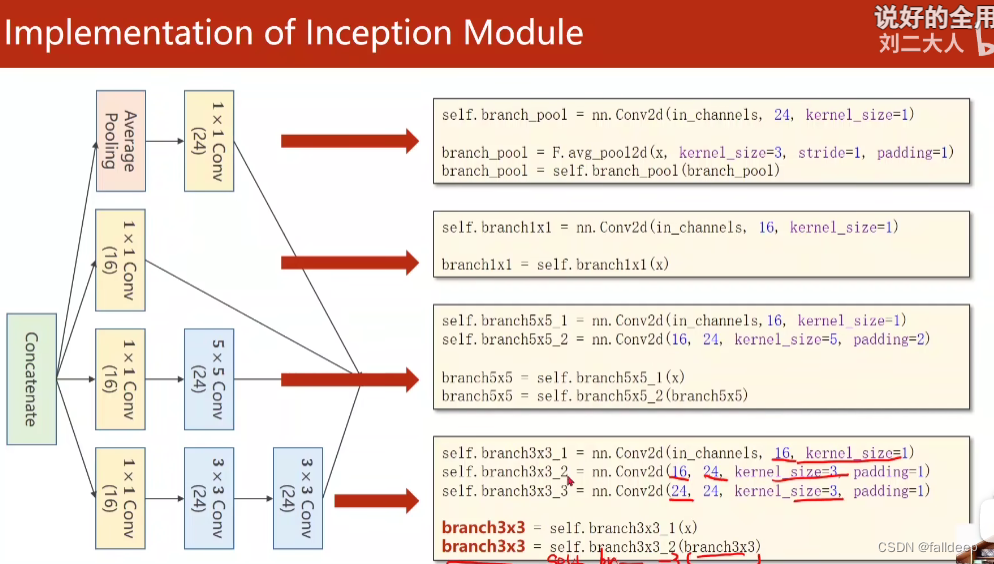
《PyTorch深度学习实践》第十一课(卷积神经网络CNN高级版)
NB-IOT智能云家具项目系列实站

Nacos集群的搭建过程详解
vs2017关于函数命名方面的注意事项
The cocos interview answers you are looking for are all here!
随机推荐
DevExpress中针对指定列进行百分比转换
scikit-image图像处理笔记
Tencent Internal Technology: Evolution of Server Architecture of "The Legend of Xuanyuan"
概率与期望部分题解
淘宝宝贝页面制作
Jenkins详细配置
golang-条件语句
Nacos集群搭建
Transformer详细解读与预测实例记录
【内推】新相微电子
【FAQ】什么是 Canon CCAPI
Promise (三) async/await
Successful indie developers deal with failure & imposters
邮件管理 过滤邮件
《PyTorch深度学习实践》第十一课(卷积神经网络CNN高级版)
【FAQ】What is Canon CCAPI
h5页面回退到微信小程序并携带参数
NB-IOT智能云家具项目系列实站
Error correction notes for the book Image Processing, Analysis and Machine Vision
Quick Start to Drools Rule Engine (1)