当前位置:网站首页>【使用TensorRT通过ONNX部署Pytorch项目】
【使用TensorRT通过ONNX部署Pytorch项目】
2022-07-05 11:34:00 【网络星空(luoc)】
文章目录
1 模型方案
TensorRT 的安装介绍可根据博文TensorRT安装及使用教程和windows安装tensorrt了解。
引用【1】 标题:TensorRT安装及使用教程 链接:
https://blog.csdn.net/zong596568821xp/article/details/86077553
作者:ZONG_XP
引用【2】 标题: windows安装tensorrt 链接:
https://zhuanlan.zhihu.com/p/339753895
作者: 知乎用户15Z1y4
1.1 部署流程
基于ONNX路线,调用C++、Python接口后交给Builder,最后生成引擎。
1.2 正确导出onnx
简单写了一个例子:
import torch
import torch.nn as nn
class Model(nn.Module):
def __init__(self):
super().__init__()
self.conv = nn.Conv2d(in_channels=1,out_channels=1,kernel_size=3,stride=1,padding=1,bias=True)
self.conv.weight.data.fill_(1)
self.conv.bias.data.fill_(1)
def forward(self,x):
x = self.conv(x)
return x.view(-1,int(x.numel()//x.size(0)))
model = Model().eval()
x = torch.full((1,1,3,3),1.0)
y = model(x)
torch.onnx.export(
model,(x,),"test.onnx",verbose=True
)
用netron导入生成的onnx文件,可在线查看网络结构和参数: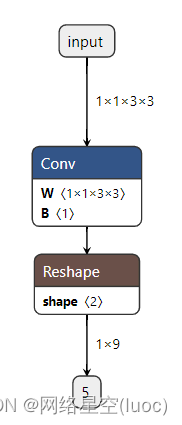
1.3 在C++中使用
首先将tensorRT路径下的include内的文件拷贝到cuda对应的include文件夹下,lib文件夹内的lib文件和dll文件分别拷贝到cuda对应的lib/x64文件夹下和bin文件夹下。
再配置VS环境,这里给出需要配置清单:
├── VC++目录
│├── 包含目录
%OPENCV_PATH%\opencv\build\include
%OPENCV_PATH%\opencv\build\include\opencv2
│├──库目录
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.3\lib\x64
%OPENCV_PATH%\opencv\build\x64\vc15\lib
├──C/C++
│├──常规
││├──附加包含目录
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.3\include
├──链接器
│├──常规
││├──附加库目录
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.3\lib\x64
│├──输入
││├──附加依赖项
c10.lib
libprotobuf.lib
mkldnn.lib
torch.lib
torch_cpu.lib
nvinfer.lib
nvinfer_plugin.lib
nvonnxparser.lib
nvparsers.lib
cudnn.lib
cublas.lib
cudart.lib
nvrtc.lib
opencv_world3416.lib
根据TensorRT官方开发者指南中的C++ API实例,开发流程大致如下:
1.3.1 构建阶段
首先创建builder,先实例化ILogger接口来捕获异常:
class Logger : public ILogger
{
void log(Severity severity, const char* msg) override
{
// suppress info-level messages
if (severity <= Severity::kWARNING)
std::cout << msg << std::endl;
}
} logger;
但是按照官方文档来写会报错:重写虚函数的限制性异常规范比基类虚成员函数
看了官方的sample,logging.h里写的是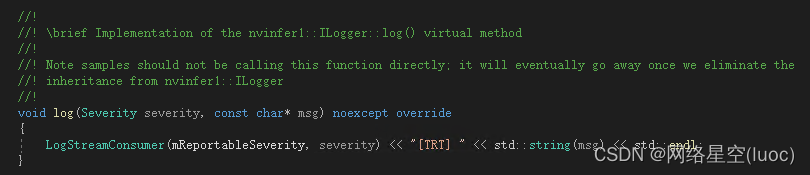
所以此处改成:
class Logger : public ILogger
{
//void log(Severity severity, const char* msg) override
void log(Severity severity, const char* msg) noexcept override
{
// suppress info-level messages
if (severity <= Severity::kWARNING)
std::cout << msg << std::endl;
}
} logger;
接着实例化builder:
IBuilder* builder = createInferBuilder(logger);
实例化builder后,优化模型的第一步是创建网络定义:
uint32_t flag = 1U <<static_cast<uint32_t>(NetworkDefinitionCreationFlag::kEXPLICIT_BATCH)
INetworkDefinition* network = builder->createNetworkV2(flag);
定义好网络以后,可以创建ONNX解析器来填充网络:
IParser* parser = createParser(*network, logger);
然后,读取模型文件并处理任何错误:
parser->parseFromFile(modelFile, ILogger::Severity::kWARNING);
for (int32_t i = 0; i < parser.getNbErrors(); ++i)
{
std::cout << parser->getError(i)->desc() << std::endl;
}
接着构建engine,创建一个构建配置,指定 TensorRT 应如何优化模型。
unsigned int maxBatchSize = 1;
builder->setMaxBatchSize(maxBatchSize);
IBuilderConfig* config = builder->createBuilderConfig();
此接口有许多属性,您可以设置这些属性以控制 TensorRT 如何优化网络。一个重要的属性是最大工作空间大小。层实现通常需要一个临时工作空间,并且此参数限制了网络中任何层可以使用的最大大小。如果提供的工作空间不足,TensorRT 可能无法找到层的实现。
config->setMaxWorkspaceSize(1U << 20);
指定好配置便可构建引擎,序列化模型,即把engine转换为可存储的格式以备后用。推理时,再简单的反序列化一下这个engine即可直接用来做推理。通常创建一个engine还是比较花时间的,可以使用这种序列化的方法避免每次重新创建engine:
IHostMemory* serializedModel = builder->buildSerializedNetwork(*network, *config);
序列化引擎包含必要的权重副本,解析器、网络定义、构建器配置和构建器不再需要,可以安全地删除:
delete parser;
delete network;
delete config;
delete builder;
1.3.2 反序列化模型
假设之前已经序列化了一个优化模型并希望执行推理:
IRuntime* runtime = createInferRuntime(logger);
ICudaEngine* engine = runtime->deserializeCudaEngine(modelData, modelSize);
1.3.3 执行推理
IExecutionContext *context = engine->createExecutionContext();
int32_t inputIndex = engine->getBindingIndex(INPUT_NAME);
int32_t outputIndex = engine->getBindingIndex(OUTPUT_NAME);
void* buffers[2];
buffers[inputIndex] = inputBuffer;
buffers[outputIndex] = outputBuffer;
context->enqueueV2(buffers, stream, nullptr);
这里是为了异步推理使用enqueueV2,如果希望同步推理,可以使用excuteV2
2 使用TensorRT部署YOLOv5
2.1 下载YOLOv5源码
下载https://github.com/ultralytics/yolov5master分支。
2.2 导出YOLOv5 onnx模型
打开export.py文件直接运行后生成yolov5s.onnx文件,打开后如图:

2.3 在C++中使用
加载导出的yolov5s.onnx并推理(项目完整代码在TensorRT部署yoloV5源码):
#include <iostream>
#include "NvOnnxParser.h"
#include "NvInfer.h"
#include "opencv2/opencv.hpp"
#include <cuda_runtime_api.h>
using namespace cv;
using namespace nvinfer1;
using namespace nvonnxparser;
using namespace std;
class Logger : public ILogger
{
//void log(Severity severity, const char* msg) override
void log(Severity severity, nvinfer1::AsciiChar const* msg) noexcept override
{
// suppress info-level messages
if (severity <= Severity::kWARNING)
std::cout << msg << std::endl;
}
} gLogger;
int main() {
// 实例化builder
IBuilder* builder = createInferBuilder(gLogger);
nvinfer1::INetworkDefinition* network = builder->createNetworkV2(1U << static_cast<uint32_t>(NetworkDefinitionCreationFlag::kEXPLICIT_BATCH));
// 加载onnx文件
nvonnxparser::IParser* parser = nvonnxparser::createParser(*network, gLogger);
const char* onnx_filename = "yolov5s.onnx";
parser->parseFromFile(onnx_filename, static_cast<int>(Logger::Severity::kWARNING));
for (int i = 0; i < parser->getNbErrors(); ++i)
{
std::cout << parser->getError(i)->desc() << std::endl;
}
std::cout << "successfully load the onnx model" << std::endl;
// 创建引擎
unsigned int maxBatchSize = 1;
builder->setMaxBatchSize(maxBatchSize);
IBuilderConfig* config = builder->createBuilderConfig();
config->setMaxWorkspaceSize(1 << 20);
ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config);
// 序列化
IHostMemory* serializedModel = engine->serialize();
std::ofstream serialize_output_stream("./build/yolov5_engine_output.trt", std::ios_base::out | std::ios_base::binary);;
serialize_output_stream.write((char*)serializedModel->data(), serializedModel->size());
serialize_output_stream.close();
delete parser;
delete network;
delete config;
delete builder;
// 反序列化
IRuntime* runtime = createInferRuntime(gLogger);
std::string cached_path = "./build/yolov5_engine_output.trt";
std::ifstream trtModelFile(cached_path, std::ios_base::in | std::ios_base::binary);
trtModelFile.seekg(0, ios::end);
int size = trtModelFile.tellg();
trtModelFile.seekg(0, ios::beg);
char* buff = new char[size];
trtModelFile.read(buff, size);
trtModelFile.close();
ICudaEngine* re_engine = runtime->deserializeCudaEngine((void*)buff, size, NULL);
delete buff;
//创建context
//创建context
IExecutionContext* context = re_engine->createExecutionContext();
// 图片处理
string img_path = "bus.jpg";
cv::Mat img = imread(img_path);
int h = img.rows;//获取图片的长
int w = img.cols;//获取图片的宽
cvtColor(img, img, COLOR_BGR2YCrCb);//将图片转换为YCrCb
vector<Mat> over;
split(img, over);
over[0].convertTo(over[0], CV_32F, 1 / 255.0); //将Y通道归一化
//创建buffers 指向输入输出流
void* buffers[2];
int inputIndex;
int outputIndex;
for (int bi = 0; bi < re_engine->getNbBindings(); bi++)
{
if (re_engine->bindingIsInput(bi) == true)
inputIndex = bi;
else
outputIndex = bi;
}
// 分配buffers空间
cudaMalloc(&buffers[inputIndex], h * w * sizeof(float));
cudaMalloc(&buffers[outputIndex], h * 2 * w * 2 * sizeof(float));//超分后的大小
//创建cuda流
cudaStream_t stream;
cudaStreamCreate(&stream);
//复制图片数据到GPU
cudaMemcpyAsync(&buffers[inputIndex], &over[0], h * w * sizeof(float), cudaMemcpyHostToDevice, stream);
//执行推理
context->enqueue(1, buffers, stream, nullptr);
//将3个通道都转为超分后的大小
for (int i = 0; i < 3; i++)
resize(over[i], over[i], Size(w * 2, h * 2), 0, 0, INTER_CUBIC);
//将GPU数据拷贝回CPU
cudaMemcpy(&over[0], &buffers[outputIndex], h * 2 * w * 2 * sizeof(float), cudaMemcpyDeviceToHost);
//反归一化,转换数据类型
over[0].convertTo(over[0], CV_8U, 1 * 255);
//合并3通道,写入文件
merge(over, img);
//将YCrCb转回RGB(opencv中是BGR),写入文件;
cvtColor(img, img, COLOR_YCrCb2BGR);
imwrite("bus_infer.jpg", img);
//释放资源
cudaStreamDestroy(stream);
context->destroy();
re_engine->destroy();
runtime->destroy();
cudaFree(buffers[inputIndex]);
return 0;
}
运行结果:

如果报错C4996:
‘XXXX’: This function or variable may be unsafe. Consider using localtime_s instead. To disable deprecation, use _CRT_SECURE_NO_WARNINGS. See online help for details.
在报错的文件中添加:
#pragma warning(disable:4996)
如果报错C2664:
“HMODULE LoadLibraryW(LPCWSTR)”: 无法将参数 1 从“const _Elem *”转换为“LPCWSTR”
右键解决方案->属性->配置属性->高级->字符集
将"使用Unicode字符集"改成"使用多字节字符集"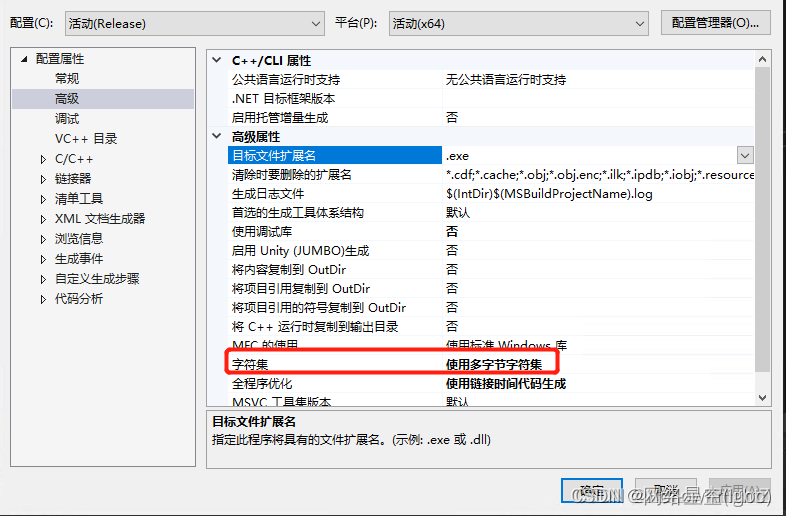
TensorRT报错:
TensorRT was linked against cuBLAS/cuBLAS LT 11.6.3 but loaded cuBLAS/cuBLAS LT 11.5.1
通过查看博文https://blog.csdn.net/qq_41151162/article/details/118735414发现是cuda版本问题。
TensorRT报错:
Parameter check failed at: ...
导致这个的原因是预训练模型与网络结构不匹配,重新生成对应的预训练模型即可。
边栏推荐
- Differences between IPv6 and IPv4 three departments including the office of network information technology promote IPv6 scale deployment
- [LeetCode] Wildcard Matching 外卡匹配
- 查看多台机器所有进程
- sklearn模型整理
- redis主从模式
- FreeRTOS 中 RISC-V-Qemu-virt_GCC 的调度时机
- 【无标题】
- 如何通俗理解超级浏览器?可以用于哪些场景?有哪些品牌?
- MySQL 巨坑:update 更新慎用影响行数做判断!!!
- An error is reported in the process of using gbase 8C database: 80000305, host IPS long to different cluster. How to solve it?
猜你喜欢
《增长黑客》阅读笔记

Harbor镜像仓库搭建
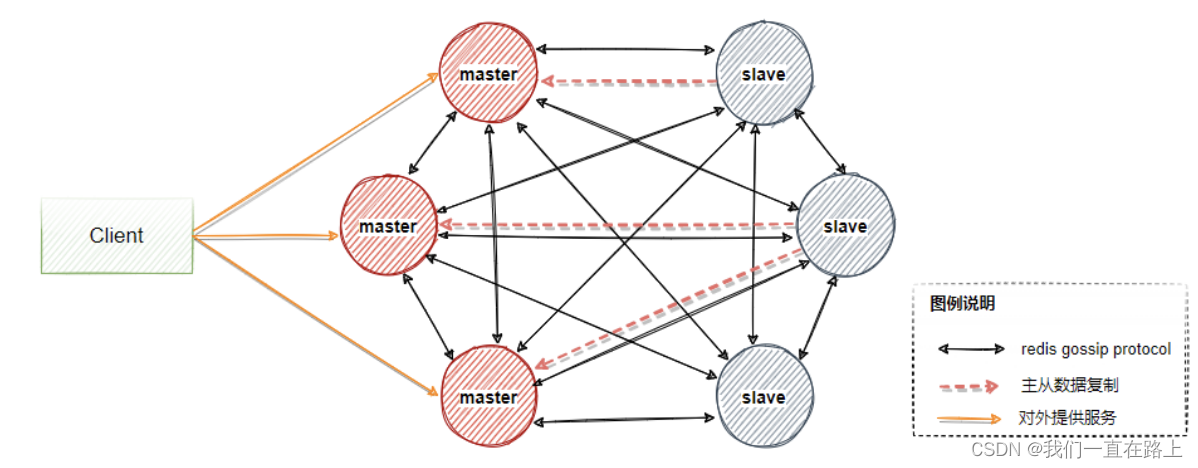
redis 集群模式原理

The ninth Operation Committee meeting of dragon lizard community was successfully held

7 themes and 9 technology masters! Dragon Dragon lecture hall hard core live broadcast preview in July, see you tomorrow

How can China Africa diamond accessory stones be inlaid to be safe and beautiful?
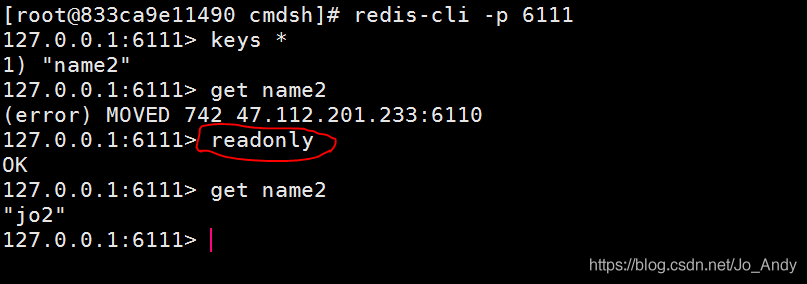
简单解决redis cluster中从节点读取不了数据(error) MOVED

【爬虫】wasm遇到的bug
7.2 daily study 4

紫光展锐全球首个5G R17 IoT NTN卫星物联网上星实测完成
随机推荐
Dynamic SQL of ibatis
技术分享 | 常见接口协议解析
边缘计算如何与物联网结合在一起?
Mysql统计技巧:ON DUPLICATE KEY UPDATE用法
Oneforall installation and use
阻止浏览器后退操作
COMSOL--建立几何模型---二维图形的建立
Evolution of multi-objective sorting model for classified tab commodity flow
Programmers are involved and maintain industry competitiveness
Open3D 欧式聚类
shell脚本文件遍历 str转数组 字符串拼接
COMSOL -- three-dimensional graphics random drawing -- rotation
go语言学习笔记-初识Go语言
sklearn模型整理
12.(地图数据篇)cesium城市建筑物贴图
redis的持久化机制原理
MySQL statistical skills: on duplicate key update usage
[there may be no default font]warning: imagettfbbox() [function.imagettfbbox]: invalid font filename
2048 game logic
MySQL giant pit: update updates should be judged with caution by affecting the number of rows!!!