当前位置:网站首页>Fairmot yolov5s to onnx
Fairmot yolov5s to onnx
2022-06-25 07:45:00 【cv-daily】
Code :https://github.com/ifzhang/FairMOT
Paper explanation and reference :https://blog.csdn.net/weixin_42398658/article/details/110873083
https://www.163.com/dy/article/H10AGKQM0552OFB6.html
https://zhuanlan.zhihu.com/p/393322545
Loss function
self.loss_stats, self.loss = self._get_losses(opt)
###IDLoss=crossentropy
###crit=focalloss
###crit_reg=l1loss
###crit_wh=l1loss
Model decoding
with torch.no_grad():
output = self.model(im_blob)[-1]
hm = output['hm'].sigmoid_()
wh = output['wh']
id_feature = output['id']
id_feature = F.normalize(id_feature, dim=1)
reg = output['reg'] if self.opt.reg_offset else None
dets, inds = mot_decode(hm, wh, reg=reg, ltrb=self.opt.ltrb, K=self.opt.K)
id_feature = _tranpose_and_gather_feat(id_feature, inds) #(1,500,64)
id_feature = id_feature.squeeze(0) #(500,64)
id_feature = id_feature.cpu().numpy() #(500,64)
dets = self.post_process(dets, meta) #(500,5)
dets = self.merge_outputs([dets])[1] #(500,5)
remain_inds = dets[:, 4] > self.opt.conf_thres
dets = dets[remain_inds] # The remaining target box after filtering (26,5)
id_feature = id_feature[remain_inds] # What is left after filtering id features (26,64)
if len(dets) > 0:
'''Detections'''
detections = [STrack(STrack.tlbr_to_tlwh(tlbrs[:4]), tlbrs[4], f, 30) for
(tlbrs, f) in zip(dets[:, :5], id_feature)]
else:
detections = []
''' Add newly detected tracklets to tracked_stracks'''
unconfirmed = []
tracked_stracks = [] # type: list[STrack]
for track in self.tracked_stracks:
if not track.is_activated:
unconfirmed.append(track)
else:
tracked_stracks.append(track)
''' Step 2: First association, with embedding'''
strack_pool = joint_stracks(tracked_stracks, self.lost_stracks)
# Predict the current location with KF
#for strack in strack_pool:
#strack.predict()
STrack.multi_predict(strack_pool)
dists = matching.embedding_distance(strack_pool, detections)
#dists = matching.iou_distance(strack_pool, detections)
dists = matching.fuse_motion(self.kalman_filter, dists, strack_pool, detections)
matches, u_track, u_detection = matching.linear_assignment(dists, thresh=0.4)
...
‘hm’:(1,1,152,272)
‘wh’:(1,4,152,272)
‘id’:(1,64,152,272), The length is 64 Characteristics of
‘reg’:(1,2,152,272)
dets:(1,500,6)
id_feature:(1,500,64)
Reasoning time comparison
##### FairMOT
t1 = time_sync()
output = self.model(im_blob)[-1]
t2 = time_sync()
#####yolov5s
t1 = time_sync()
pred = model(img,augment=augment,visualize=increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False)[0]
pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
t2 = time_sync()
2 individual 1080ti
u edition yolov5s Model reasoning +nms, 640640, A picture takes time 6ms
yolov5s FairMOT Model reasoning ,1088608, A picture takes time 10ms
FairMOT yolov5s turn onnx
"""Export a YOLOv5 *.pt model to TorchScript, ONNX, CoreML formats Usage: $ python path/to/export.py --weights yolov5s.pt --img 640 --batch 1 """
import argparse
import sys
import time
from pathlib import Path
import torch
import torch.nn as nn
from torch.utils.mobile_optimizer import optimize_for_mobile
from lib.models.model import create_model, load_model
from lib.models.yolo import Detect
from lib.models.common import Conv
FILE = Path(__file__).absolute()
sys.path.append(FILE.parents[0].as_posix()) # add yolov5/ to path
def colorstr(*input):
# Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
*args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
colors = {
'black': '\033[30m', # basic colors
'red': '\033[31m',
'green': '\033[32m',
'yellow': '\033[33m',
'blue': '\033[34m',
'magenta': '\033[35m',
'cyan': '\033[36m',
'white': '\033[37m',
'bright_black': '\033[90m', # bright colors
'bright_red': '\033[91m',
'bright_green': '\033[92m',
'bright_yellow': '\033[93m',
'bright_blue': '\033[94m',
'bright_magenta': '\033[95m',
'bright_cyan': '\033[96m',
'bright_white': '\033[97m',
'end': '\033[0m', # misc
'bold': '\033[1m',
'underline': '\033[4m'}
return ''.join(colors[x] for x in args) + f'{
string}' + colors['end']
def export_onnx(model, img, file, opset_version, train, dynamic, simplify):
# ONNX model export
prefix = colorstr('ONNX:')
import onnx
print(f'\n{
prefix} starting export with onnx {
onnx.__version__}...')
f = file.with_suffix('.onnx')
torch.onnx.export(model, img, f, verbose=False, opset_version=opset_version,
training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
do_constant_folding=not train,
input_names=['images'],
output_names=['output'],
dynamic_axes={
'images': {
0: 'batch', 2: 'height', 3: 'width'}, # shape(1,3,640,640)
'output': {
0: 'batch', 1: 'anchors'} # shape(1,25200,85)
} if dynamic else None)
# Checks
model_onnx = onnx.load(f) # load onnx model
onnx.checker.check_model(model_onnx) # check onnx model
# print(onnx.helper.printable_graph(model_onnx.graph)) # print
# Simplify
if simplify:
try:
import onnxsim
print(f'{
prefix} simplifying with onnx-simplifier {
onnxsim.__version__}...')
model_onnx, check = onnxsim.simplify(
model_onnx,
dynamic_input_shape=dynamic,
input_shapes={
'images': list(img.shape)} if dynamic else None)
assert check, 'assert check failed'
onnx.save(model_onnx, f)
except Exception as e:
print(f'{
prefix} simplifier failure: {
e}')
def select_device(device='', batch_size=None):
device = str(device).strip().lower().replace('cuda:', '') # to string, 'cuda:0' to '0'
cpu = device == 'cpu'
cuda = not cpu and torch.cuda.is_available()
return torch.device('cuda:0' if cuda else 'cpu')
class SiLU(nn.Module): # export-friendly version of nn.SiLU()
@staticmethod
def forward(x):
return x * torch.sigmoid(x)
class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
@staticmethod
def forward(x):
# return x * F.hardsigmoid(x) # for torchscript and CoreML
return x * F.hardtanh(x + 3, 0., 6.) / 6. # for torchscript, CoreML and ONNX
def run(weights='', # weights path
img_size=(640, 640), # image (height, width)
batch_size=1, # batch size
device='cpu', # cuda device, i.e. 0 or 0,1,2,3 or cpu
include=('torchscript', 'onnx', 'coreml'), # include formats
half=False, # FP16 half-precision export
inplace=False, # set YOLOv5 Detect() inplace=True
train=False, # model.train() mode
optimize=False, # TorchScript: optimize for mobile
dynamic=False, # ONNX: dynamic axes
simplify=False, # ONNX: simplify model
opset_version=12, # ONNX: opset version
arch='',
head_conv=-1,
model_path='',
ltrb=True,
reid_dim=64,
):
if opt.head_conv == -1: # init default head_conv
opt.head_conv = 256 if 'dla' in opt.arch else 256
num_classes = 1
heads = {
'hm': num_classes,
'wh': 2 if not ltrb else 4,
'id': reid_dim}
heads.update({
'reg': 2})
t = time.time()
include = [x.lower() for x in include]
img_size *= 2 if len(img_size) == 1 else 1 # expand
file = Path(weights)
# Load PyTorch model
device = select_device(device)
assert not (device.type == 'cpu' and half), '--half only compatible with GPU export, i.e. use --device 0'
model = create_model(arch, heads, head_conv)
model = load_model(model, model_path)
# Input
# gs = int(max(model.stride)) # grid size (max stride)
# img_size = [check_img_size(x, gs) for x in img_size] # verify img_size are gs-multiples
img = torch.zeros(batch_size, 3, *img_size).to(device) # image size(1,3,320,192) iDetection
# Update model
if half:
img, model = img.half(), model.half() # to FP16
model.train() if train else model.eval() # training mode = no Detect() layer grid construction
for k, m in model.backbone.named_modules():
if isinstance(m, Conv): # assign export-friendly activations
if isinstance(m.act, nn.Hardswish):
m.act = Hardswish()
elif isinstance(m.act, nn.SiLU):
m.act = SiLU()
elif isinstance(m, Detect):
m.inplace = inplace
m.onnx_dynamic = dynamic
# m.forward = m.forward_export # assign forward (optional)
# Exports
# if 'torchscript' in include:
# export_torchscript(model, img, file, optimize)
if 'onnx' in include:
export_onnx(model.backbone, img, file, opset_version, train, dynamic, simplify)
# Finish
print(f'\nExport complete ({
time.time() - t:.2f}s). Visualize with https://github.com/lutzroeder/netron.')
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='../exp/mot/all_yolov5s/model_60.pth', help='weights path')
parser.add_argument('--img-size', nargs='+', type=int, default=[608, 1088], help='image (height, width)')
parser.add_argument('--batch-size', type=int, default=1, help='batch size')
parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--include', nargs='+', default=['torchscript', 'onnx', 'coreml'], help='include formats')
parser.add_argument('--half', action='store_true', help='FP16 half-precision export')
parser.add_argument('--inplace', action='store_true', help='set YOLOv5 Detect() inplace=True')
parser.add_argument('--train', action='store_true', help='model.train() mode')
parser.add_argument('--optimize', action='store_true', help='TorchScript: optimize for mobile')
parser.add_argument('--dynamic', action='store_true', help='ONNX: dynamic axes')
parser.add_argument('--simplify', action='store_true', help='ONNX: simplify model')
parser.add_argument('--opset-version', type=int, default=12, help='ONNX: opset version')
parser.add_argument('--arch', default='yolo',
help='model architecture. Currently tested'
'resdcn_34 | resdcn_50 | resfpndcn_34 |'
'dla_34 | hrnet_18')
parser.add_argument('--head_conv', type=int, default=-1,
help='conv layer channels for output head'
'0 for no conv layer'
'-1 for default setting: '
'256 for resnets and 256 for dla.')
parser.add_argument('--model_path', default='FairMOT-master/exp/mot/all_yolov5s/model_60.pth',
help='path to pretrained model')
parser.add_argument('--ltrb', default=True,
help='regress left, top, right, bottom of bbox')
parser.add_argument('--reid_dim', type=int, default=64,
help='feature dim for reid')
opt = parser.parse_args()
return opt
def main(opt):
run(**vars(opt))
if __name__ == "__main__":
opt = parse_opt()
main(opt)
But there are still some problems with the current model , The transferred model does not include 4 A detection head , To feature only , Still bad 4 Small conv Not included .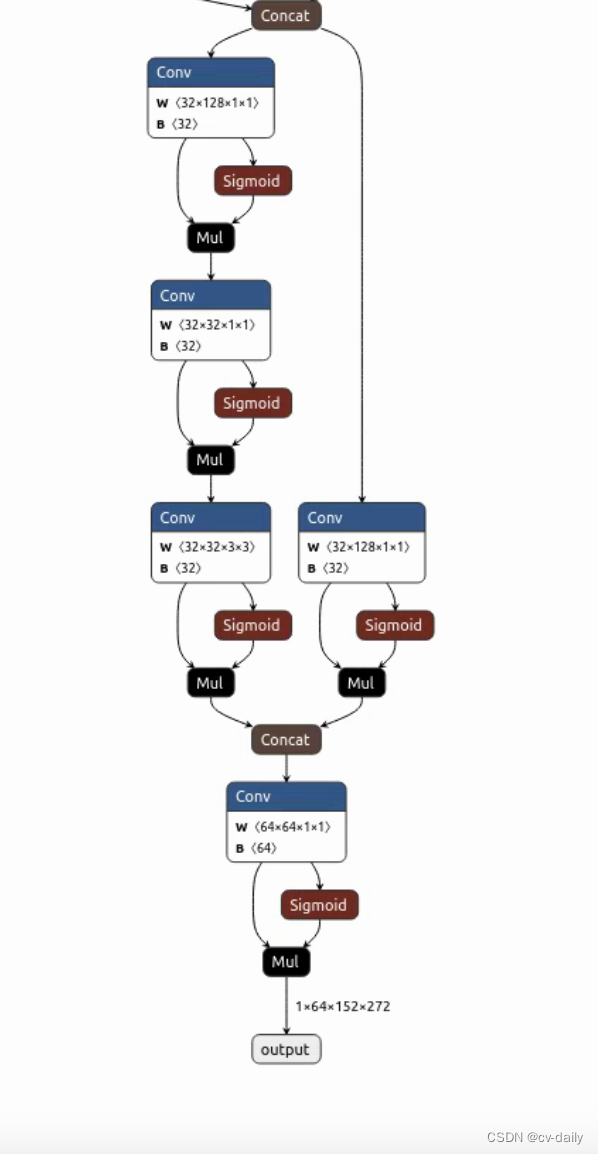

边栏推荐
- Pytorch遇到的坑:为什么模型训练时,L1loss损失无法下降?
- Chuantu microelectronics 𞓜 subminiature package isolated half duplex 485 transceiver
- Intel announced five new technological developments, including quantum computing, neural pseudo computing, machine programming, integrated optoelectronics, and secure computing
- Sichuan Tuwei ca-is3105w fully integrated DC-DC converter
- 【QT】Qt 5 的程序:打印文档
- What if there is no point in data visualization?
- Why "New Year's Eve", the original memory burst!
- (tool class) use SecureCRT as the communication medium
- Elk + filebeat log parsing, log warehousing optimization, logstash filter configuration attribute
- [pytest] modify the logo and parameterization in the allure Report
猜你喜欢

Chuantu microelectronics ca-if1051 can-fd transceiver

The method of judging whether triode can amplify AC signal

Ns32f103c8t6 can perfectly replace stm32f103c8t6

Estimation of dense forest volume based on LIDAR point cloud with few ground points

Three years of continuous decline in revenue, Tiandi No. 1 is trapped in vinegar drinks

China Mobile MCU product information
Application of point cloud intelligent drawing in intelligent construction site

Manufacturing process of PCB 2021-10-11
Genuine photoshop2022 purchase experience sharing

Misunderstanding of switching triode
随机推荐
The principle of Zener diode, what is its function?
Sichuan earth microelectronics 8-channel isolated digital input receiver
IAR compiler flashback
Audio (V) audio feature extraction
Can I open a stock account with a compass? Is it safe?
How to use printf of 51 single chip microcomputer
JDBC-DAO层实现
Sichuan Tuwei ca-if1051 can transceiver has passed aec-q100 grade 1 certification
useMemo模拟useCallback
【QT】Qt 5 的程序:打印文档
Application of point cloud intelligent drawing in intelligent construction site
Chuantu microelectronics 𞓜 subminiature package isolated half duplex 485 transceiver
Leetcode daily question - 515 Find the maximum value in each tree row
STL tutorial 4- input / output stream and object serialization
【批处理DOS-CMD命令-汇总和小结】-CMD窗口的设置与操作命令(cd、title、mode、color、pause、chcp、exit)
Introduction to Sichuan Tuwei ca-is3082wx isolated rs-485/rs-422 transceiver
(tool class) use SecureCRT as the communication medium
Storage of Galileo broadcast ephemeris in rtklib-b33
Harmony food menu interface
[distillation] pointdistiller: structured knowledge distillationwards efficient and compact 3D detection