当前位置:网站首页>[yolov3 loss function]
[yolov3 loss function]
2022-07-05 11:42:00 【Network starry sky (LUOC)】
List of articles
YOLOv3 The source code parsing 1- The overall structure of the code
Resolved code address :
github:tensorflow-yolov3
This paper analytically calculates the losses of each part compute_loss() part :
yolov3 The loss function of is a little more complicated , I spent some time reading many articles about yolov3 Loss function of , At last, I have a little bit of eyes , The next article is about yolov3 The theoretical part of the loss function . This source code analysis is mainly mentioned in the structure diagram and source code comments , There is no special text description in the relevant part .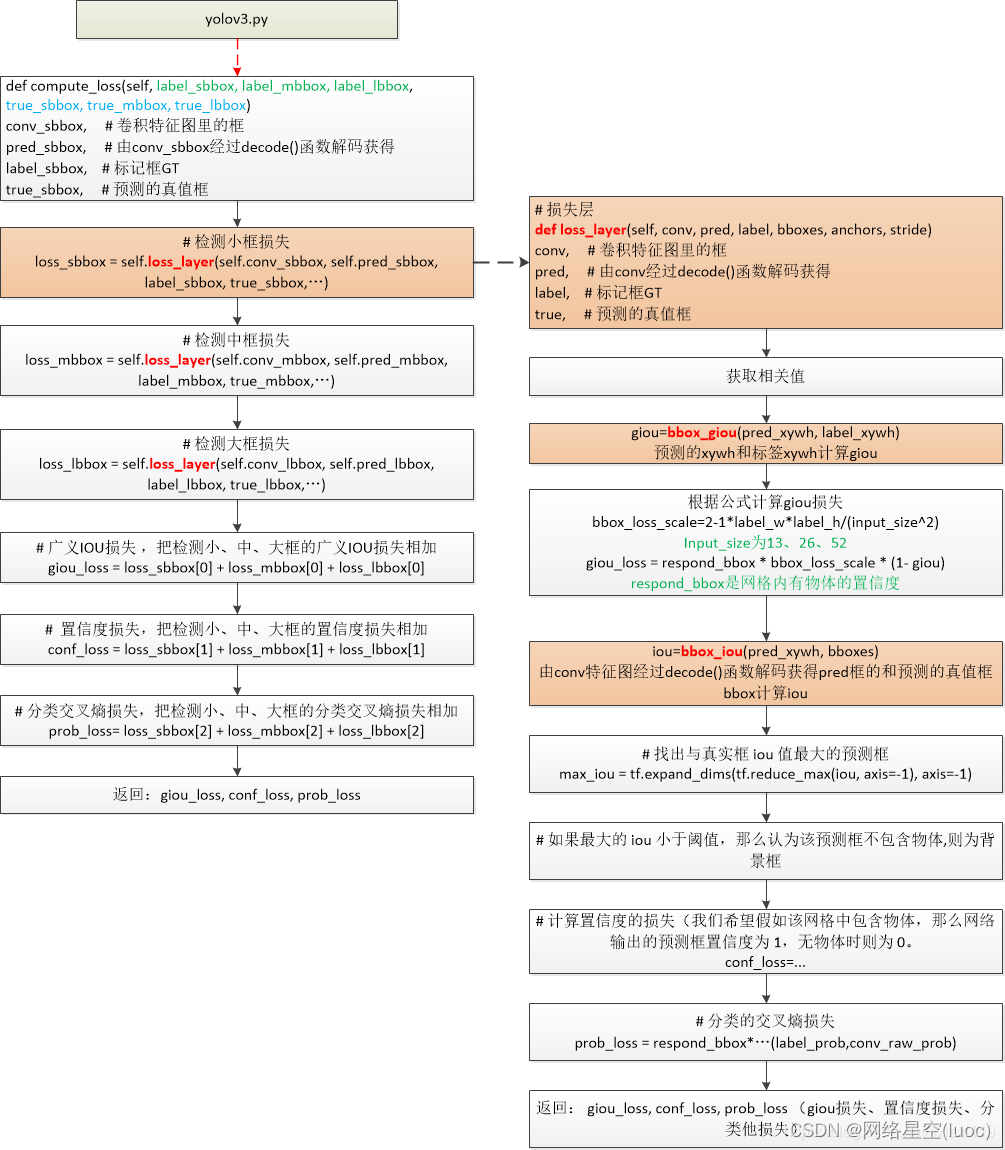
Start in train.py Of the 55 Line call compute_loss() Calculate the loss of model training , And then again yolov3.py Enter into compute_loss() function
compute_loss() function
In fact, this part of the code does not perform the core calculation , It mainly passes in related parameters , And then call loss_layer() Function to perform related calculations .
chart :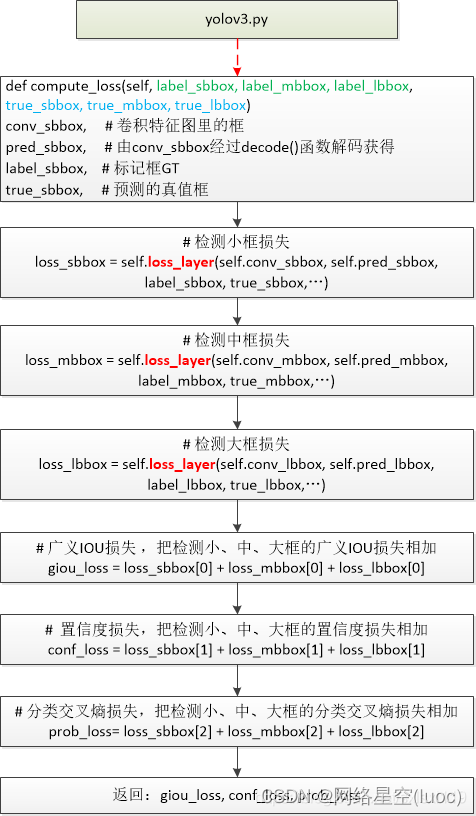
Source code :
# Calculate the loss
''' conv_sbbox, # The original value in the convolution characteristic graph pred_sbbox, # from conv_sbbox after decode() Function decode to get label_sbbox, # [52,52,3,85] Marker box GT The coordinate values of , Degree of confidence , Multiple values such as probability true_sbbox, # Only the marking box GT The coordinate values of (3,150,4) true_box The following values are passed in during actual training self.true_sbboxes: train_data[4]==sbboxes == bboxes_xywh[..,0] # Get the coordinate values of small, medium and large marker boxes self.true_mbboxes: train_data[5]==mbboxes == bboxes_xywh[..,1] # Get the coordinate values of small, medium and large marker boxes self.true_lbboxes: train_data[6]==lbboxes == bboxes_xywh[..,2] # Get the coordinate values of small, medium and large marker boxes '''
def compute_loss(self, label_sbbox, label_mbbox, label_lbbox, true_sbbox, true_mbbox, true_lbbox):
# Detect small frame loss 52*52
with tf.name_scope('smaller_box_loss'):
loss_sbbox = self.loss_layer(self.conv_sbbox, self.pred_sbbox, label_sbbox, true_sbbox,
anchors = self.anchors[0], stride = self.strides[0])
# Detect the loss of the middle frame 26*26
with tf.name_scope('medium_box_loss'):
loss_mbbox = self.loss_layer(self.conv_mbbox, self.pred_mbbox, label_mbbox, true_mbbox,
anchors = self.anchors[1], stride = self.strides[1])
# Detect the loss of large frame 13*13
with tf.name_scope('bigger_box_loss'):
loss_lbbox = self.loss_layer(self.conv_lbbox, self.pred_lbbox, label_lbbox, true_lbbox,
anchors = self.anchors[2], stride = self.strides[2])
# In a broad sense IOU Loss , Turn the test down 、 in 、 The broad sense of large frame IOU Loss addition
with tf.name_scope('giou_loss'):
giou_loss = loss_sbbox[0] + loss_mbbox[0] + loss_lbbox[0]
# Loss of confidence , Turn the test down 、 in 、 The confidence loss of the big box is added
with tf.name_scope('conf_loss'):
conf_loss = loss_sbbox[1] + loss_mbbox[1] + loss_lbbox[1]
# Classification cross entropy loss , Turn the test down 、 in 、 The classification cross entropy loss of the large frame is added
with tf.name_scope('prob_loss'):
prob_loss = loss_sbbox[2] + loss_mbbox[2] + loss_lbbox[2]
return giou_loss, conf_loss, prob_loss
loss_layer() function
chart :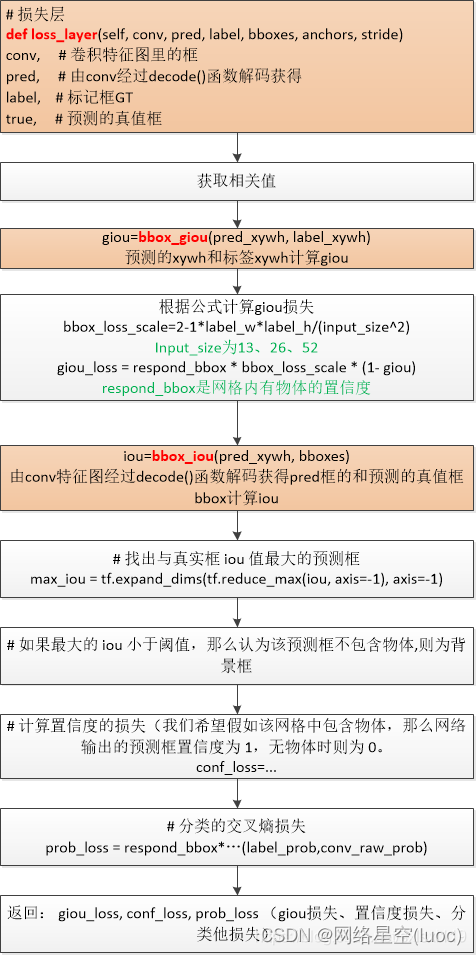
Source code :
# Loss layer
''' conv, # The original value in the convolution characteristic graph pred, # from conv after decode() Function decode to get label, # Marker box GT The coordinate values of , Degree of confidence , Multiple values such as probability [52,52,3,85] bboxes, # Only the marking box GT The coordinate values of (3,150,4) anchors # The benchmark anchor The width and height of stride # The zoom ratio of the feature image to the original image '''
def loss_layer(self, conv, pred, label, bboxes, anchors, stride):
conv_shape = tf.shape(conv) # The value obtained by convolution of the original graph
batch_size = conv_shape[0] # How many pictures at a time
output_size = conv_shape[1] # Feature map size 13*13, 26*26, 52*52
input_size = stride * output_size # 13*32 26*16 52*8
# conv is reshaped here to 5 dimensions
conv = tf.reshape(conv, (batch_size, output_size, output_size,
self.anchor_per_scale, 5 + self.num_class))
# this is the logit before going into sigmoid functions
conv_raw_conf = conv[:, :, :, :, 4:5] # Original confidence , The starting value is the value of the characteristic image
conv_raw_prob = conv[:, :, :, :, 5:] # The original prediction probability , The starting value is the value of the characteristic image
pred_xywh = pred[:, :, :, :, 0:4] # Prediction box xywh
pred_conf = pred[:, :, :, :, 4:5] # Prediction confidence
# true coordinates (x, y, w, h) Mark coordinates GT
label_xywh = label[:, :, :, :, 0:4] # Mark box coordinates
# what is this?
respond_bbox = label[:, :, :, :, 4:5] # Degree of confidence , Determine whether there are objects in the grid
# true probabilities
label_prob = label[:, :, :, :, 5:] # Truth probability
# GIOU Loss
# label_xywh and pred_xywh are used to compute giou
# Mark the... Of the box xywh And prediction box xywh To calculate giou
giou = tf.expand_dims(self.bbox_giou(pred_xywh, label_xywh), axis=-1) # In the axis Position adds a dimension ,-1 Represents the last dimension
input_size = tf.cast(input_size, tf.float32) # Data type conversion
bbox_loss_scale = 2.0 - 1.0 * label_xywh[:, :, :, :, 2:3] * label_xywh[:, :, :, :, 3:4] / (input_size ** 2)
giou_loss = respond_bbox * bbox_loss_scale * (1- giou)
# Loss of confidence
# bboxes (true_bboxes) and pred_xywh are used to compute iou
# Calculation true_bboxes and pred_xywh The cross and parallel of
iou = self.bbox_iou(pred_xywh[:, :, :, :, np.newaxis, :], bboxes[:, np.newaxis, np.newaxis, np.newaxis, :, :])
# Find the real box iou The prediction box with the largest value
max_iou = tf.expand_dims(tf.reduce_max(iou, axis=-1), axis=-1)
# If the biggest iou Less than threshold , Then it is considered that the prediction frame does not contain objects , Is the background box
respond_bgd = (1.0 - respond_bbox) * tf.cast( max_iou < self.iou_loss_thresh, tf.float32 )
conf_focal = self.focal(respond_bbox, pred_conf) # ???
# Calculate the loss of confidence ( We hope that if the grid contains objects , Then the confidence of the prediction frame of the network output is 1, When there is no object, it is 0.
conf_loss = conf_focal * (
respond_bbox * tf.nn.sigmoid_cross_entropy_with_logits(labels=respond_bbox, logits=conv_raw_conf)
+
respond_bgd * tf.nn.sigmoid_cross_entropy_with_logits(labels=respond_bbox, logits=conv_raw_conf)
)
# cross-entropy for classifications
# Cross entropy loss of classification
prob_loss = respond_bbox * tf.nn.sigmoid_cross_entropy_with_logits(labels=label_prob, logits=conv_raw_prob)
giou_loss = tf.reduce_mean(tf.reduce_sum(giou_loss, axis=[1,2,3,4]))
conf_loss = tf.reduce_mean(tf.reduce_sum(conf_loss, axis=[1,2,3,4]))
prob_loss = tf.reduce_mean(tf.reduce_sum(prob_loss, axis=[1,2,3,4]))
return giou_loss, conf_loss, prob_loss
Where called 3 A small function :
Focal loss Give Way one stage detecor It has also become a cow , It's solved class imbalance The problem of . It solves the imbalance of positive and negative samples and the problem of distinguishing simple and complex samples at the same time .
def focal(self, target, actual, alpha=1, gamma=2):
focal_loss = alpha * tf.pow(tf.abs(target - actual), gamma)
return focal_loss
Calculation giou
# Calculation giou
def bbox_giou(self, boxes1, boxes2):
boxes1 = tf.concat([boxes1[..., :2] - boxes1[..., 2:] * 0.5,
boxes1[..., :2] + boxes1[..., 2:] * 0.5], axis=-1)
boxes2 = tf.concat([boxes2[..., :2] - boxes2[..., 2:] * 0.5,
boxes2[..., :2] + boxes2[..., 2:] * 0.5], axis=-1)
boxes1 = tf.concat([tf.minimum(boxes1[..., :2], boxes1[..., 2:]),
tf.maximum(boxes1[..., :2], boxes1[..., 2:])], axis=-1)
boxes2 = tf.concat([tf.minimum(boxes2[..., :2], boxes2[..., 2:]),
tf.maximum(boxes2[..., :2], boxes2[..., 2:])], axis=-1)
boxes1_area = (boxes1[..., 2] - boxes1[..., 0]) * (boxes1[..., 3] - boxes1[..., 1])
boxes2_area = (boxes2[..., 2] - boxes2[..., 0]) * (boxes2[..., 3] - boxes2[..., 1])
left_up = tf.maximum(boxes1[..., :2], boxes2[..., :2]) # Top left
right_down = tf.minimum(boxes1[..., 2:], boxes2[..., 2:]) # The lower right
inter_section = tf.maximum(right_down - left_up, 0.0)
inter_area = inter_section[..., 0] * inter_section[..., 1]
union_area = boxes1_area + boxes2_area - inter_area
# Calculate the distance between two bounding boxes iou value
iou = inter_area / union_area
# Calculate the minimum closed convex surface C The coordinates of the upper left corner and the lower right corner
enclose_left_up = tf.minimum(boxes1[..., :2], boxes2[..., :2])
enclose_right_down = tf.maximum(boxes1[..., 2:], boxes2[..., 2:])
enclose = tf.maximum(enclose_right_down - enclose_left_up, 0.0)
# Calculate the minimum closed convex surface C The area of
enclose_area = enclose[..., 0] * enclose[..., 1]
# according to GIoU Formula calculation GIoU value
giou = iou - 1.0 * (enclose_area - union_area) / enclose_area
return giou
The intersection and union ratio of two frames
# The intersection and union ratio of two frames
def bbox_iou(self, boxes1, boxes2):
boxes1_area = boxes1[..., 2] * boxes1[..., 3]
boxes2_area = boxes2[..., 2] * boxes2[..., 3]
boxes1 = tf.concat([boxes1[..., :2] - boxes1[..., 2:] * 0.5,
boxes1[..., :2] + boxes1[..., 2:] * 0.5], axis=-1)
boxes2 = tf.concat([boxes2[..., :2] - boxes2[..., 2:] * 0.5,
boxes2[..., :2] + boxes2[..., 2:] * 0.5], axis=-1)
left_up = tf.maximum(boxes1[..., :2], boxes2[..., :2])
right_down = tf.minimum(boxes1[..., 2:], boxes2[..., 2:])
inter_section = tf.maximum(right_down - left_up, 0.0)
inter_area = inter_section[..., 0] * inter_section[..., 1]
union_area = boxes1_area + boxes2_area - inter_area
iou = 1.0 * inter_area / union_area
return iou
边栏推荐
- 分类TAB商品流多目标排序模型的演进
- 跨境电商是啥意思?主要是做什么的?业务模式有哪些?
- I used Kaitian platform to build an urban epidemic prevention policy inquiry system [Kaitian apaas battle]
- COMSOL--三维随便画--扫掠
- Pytorch training process was interrupted
- 【 YOLOv3中Loss部分计算】
- 15 methods in "understand series after reading" teach you to play with strings
- Redis集群(主从)脑裂及解决方案
- COMSOL -- three-dimensional graphics random drawing -- rotation
- 1.php的laravel创建项目
猜你喜欢
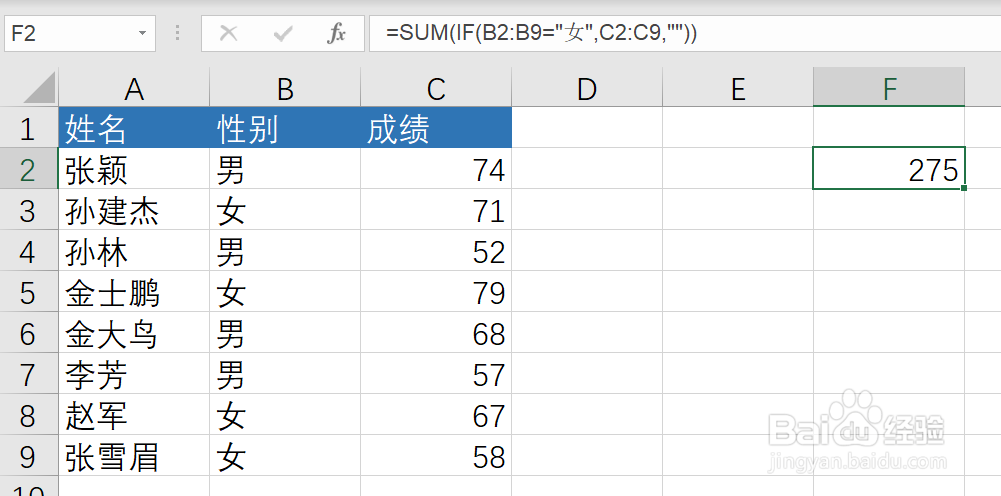
【Office】Excel中IF函数的8种用法
COMSOL--三维图形的建立

Harbor镜像仓库搭建

中非 钻石副石怎么镶嵌,才能既安全又好看?
【yolov3损失函数】

7 themes and 9 technology masters! Dragon Dragon lecture hall hard core live broadcast preview in July, see you tomorrow
AUTOCAD——遮罩命令、如何使用CAD对图纸进行局部放大
AutoCAD -- mask command, how to use CAD to locally enlarge drawings
go语言学习笔记-分析第一个程序
comsol--三维图形随便画----回转
随机推荐
XML解析
如何让你的产品越贵越好卖
liunx禁ping 详解traceroute的不同用法
Web API配置自定义路由
1个插件搞定网页中的广告
Risc-v-qemu-virt in FreeRTOS_ Scheduling opportunity of GCC
redis主从模式
【 YOLOv3中Loss部分计算】
Install esxi 6.0 interactively
redis集群中hash tag 使用
Guys, I tested three threads to write to three MySQL tables at the same time. Each thread writes 100000 pieces of data respectively, using F
Oneforall installation and use
Redis如何实现多可用区?
CDGA|数据治理不得不坚持的六个原则
管理多个Instagram帐户防关联小技巧大分享
POJ 3176-Cow Bowling(DP||记忆化搜索)
基于Lucene3.5.0怎样从TokenStream获得Token
Solve the grpc connection problem. Dial succeeds with transientfailure
ACID事务理论
爬虫(9) - Scrapy框架(1) | Scrapy 异步网络爬虫框架