当前位置:网站首页>绕任意轴旋转矩阵推导
绕任意轴旋转矩阵推导
2022-08-03 23:34:00 【122&&113】
该文是在学习 Physically Based Rendering 第2.7.6节绕任意轴旋转时对其公式的推导产生了兴趣。
首先,如图所示: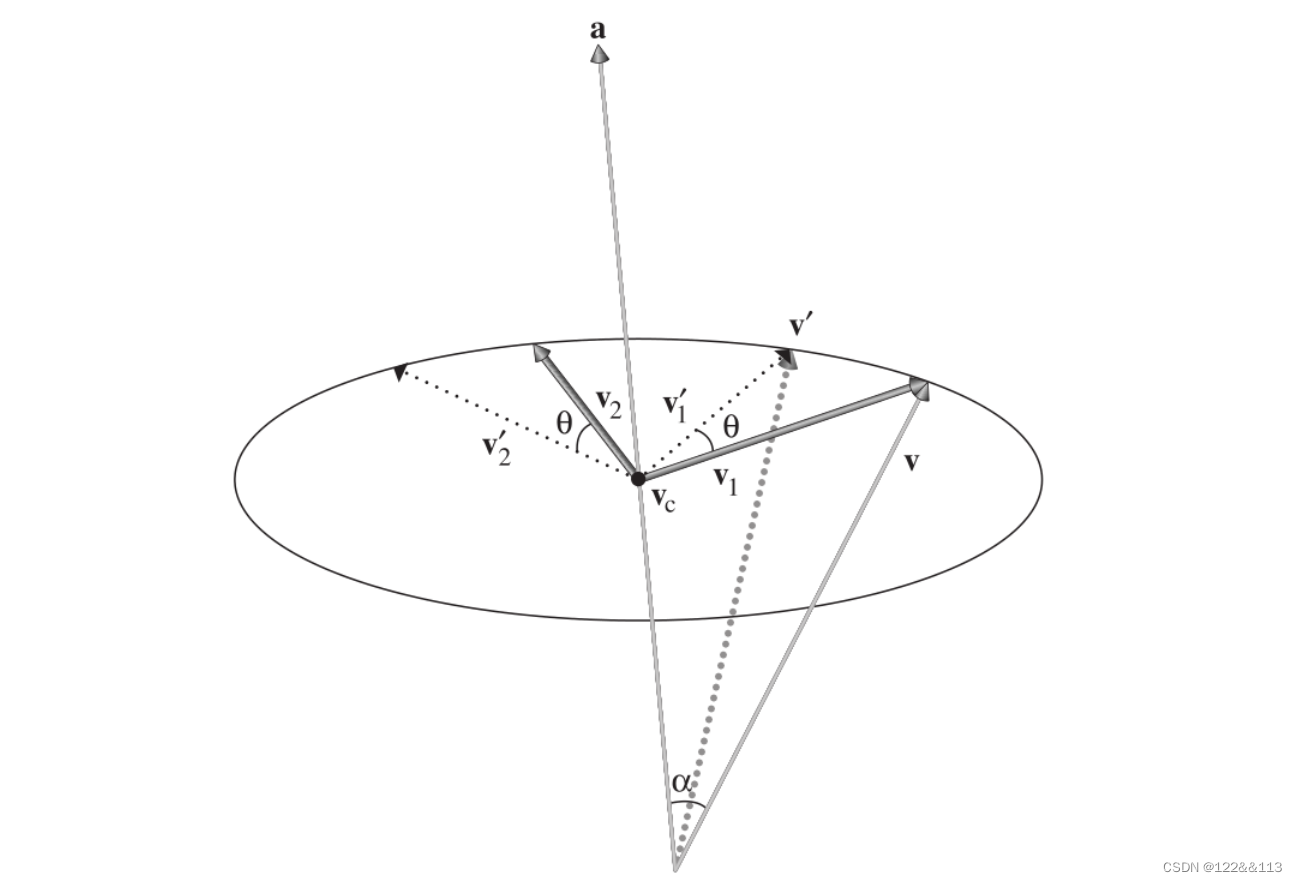
已知条件:
1). v \mathbf{v} v 是被旋转的向量。
2). a \mathbf{a} a 是围绕旋转的轴。
3). θ \theta θ 是旋转的角度。
解决思路:
通过构建坐标系 ( p , v 1 , v 2 ) (p,\mathbf{v_1},\mathbf{v_2}) (p,v1,v2) 获得绕该坐标系旋转的公式并应用到 ( 1 , 0 , 0 ) , ( 0 , 1 , 0 ) , ( 0 , 0 , 1 ) (1,0,0),(0,1,0),(0,0,1) (1,0,0),(0,1,0),(0,0,1) 的坐标系上即可获得最终应用的旋转矩阵。
假设条件:
1). a \mathbf{a} a 是单位向量,故之后用 a ^ \hat{\mathbf{a}} a^ 表示,即 ∥ a ^ ∥ = 1 \|\hat{\mathbf{a}}\|=1 ∥a^∥=1。
2). α \alpha α 为 v \mathbf{v} v 与 a ^ \hat{\mathbf{a}} a^ 的夹角。
求解:
构建向量 v 1 \mathbf{v_1} v1 ,注意全程需要结合图来理解。
v 1 = v − v c \mathbf{v_1} = \mathbf{v} - \mathbf{v_c} v1=v−vc
其中 v c = p r o j e c t ( v , a ^ ) \mathbf{v_c} = project(\mathbf{v}, \hat{\mathbf{a}}) vc=project(v,a^) ,即向量 v \mathbf{v} v 在向量 a ^ \hat{\mathbf{a}} a^ 上的投影,根据假设条件(1)和(2)可得下式:
v c = ( ∥ v ∥ cos α ) a ^ = ( ∥ v ∥ ∥ a ^ ∥ cos α ) a ^ = ( v ⋅ a ^ ) a ^ \begin{aligned} \mathbf{v_c} &= (\|\mathbf{v}\|\cos{\alpha})\hat{\mathbf{a}}\\ &= (\|\mathbf{v}\|\|\hat{\mathbf{a}}\|\cos{\alpha})\hat{\mathbf{a}} \\ &=(\mathbf{v}\cdot\hat{\mathbf{a}})\hat{\mathbf{a}} \end{aligned} vc=(∥v∥cosα)a^=(∥v∥∥a^∥cosα)a^=(v⋅a^)a^
故:
v 1 = v − ( v ⋅ a ^ ) a ^ \mathbf{v_1} = \mathbf{v} - (\mathbf{v}\cdot\hat{\mathbf{a}})\hat{\mathbf{a}} v1=v−(v⋅a^)a^由于 v c \mathbf{v_c} vc 是投影,故得到的 v 1 ⊥ a ^ \mathbf{v_1} \perp \hat{\mathbf{a}} v1⊥a^ ,因此相当于有了两个 basic vector,通过叉乘 我们可以得到第三个基向量 v 2 \mathbf{v_2} v2 ,注意这里是左手坐标系,因此因该用 v 1 × a ^ \mathbf{v_1}\times \hat{\mathbf{a}} v1×a^ 而不是 a ^ × v 1 \hat{\mathbf{a}}\times \mathbf{v_1} a^×v1,之前就是犯了这个错误,导致最后推出来的式子不对,区别可以看这篇文章:让人懵圈的左右手坐标系及Unity中的叉积
v 2 = v 1 × a ^ \mathbf{v_2} =\mathbf{v_1}\times \hat{\mathbf{a}} v2=v1×a^
这里可以通过该式获得一些隐含条件,而原书正是忽略了这些细节导致最后的公式得到的比较突然。
∥ v 2 ∥ = ∥ v 1 × a ^ ∥ ∥ v 2 ∥ = ∥ v 1 ∥ ∥ a ^ ∥ sin β \|\mathbf{v_2}\| = \|\mathbf{v_1}\times \hat{\mathbf{a}}\|\\ \|\mathbf{v_2}\| = \|\mathbf{v_1} \|\|\hat{\mathbf{a}}\|\sin{\beta} ∥v2∥=∥v1×a^∥∥v2∥=∥v1∥∥a^∥sinβ
其中如上所述, v 1 ⊥ a ^ \mathbf{v_1} \perp \hat{\mathbf{a}} v1⊥a^ ,故 β = π 2 \beta=\frac{\pi}{2} β=2π ,那么 ∥ v 2 ∥ = ∥ v 1 ∥ ∥ a ^ ∥ \|\mathbf{v_2}\| = \|\mathbf{v_1} \|\|\hat{\mathbf{a}}\| ∥v2∥=∥v1∥∥a^∥ ,又 ∥ a ^ ∥ = 1 \|\hat{\mathbf{a}}\|=1 ∥a^∥=1 ,则 ∥ v 2 ∥ = ∥ v 1 ∥ \|\mathbf{v_2}\| = \|\mathbf{v_1} \| ∥v2∥=∥v1∥现在有了三个基向量,如图,其中我们最终的目标如下:
v ′ = v c + v 1 ′ \mathbf{v'} = \mathbf{v_c}+\mathbf{v_1'} v′=vc+v1′
当前需要求解的是 v 1 ′ \mathbf{v_1'} v1′
这里也有一个隐含条件,因为向量 v \mathbf{v} v 绕 a ^ \hat{\mathbf{a}} a^ 轴旋转,且 ∥ v 2 ∥ = ∥ v 1 ∥ \|\mathbf{v_2}\| = \|\mathbf{v_1} \| ∥v2∥=∥v1∥,因此不管怎么角度怎么旋转,都在一个圆中,即 ∥ v 2 ∥ = ∥ v 1 ∥ = ∥ v 1 ′ ∥ \|\mathbf{v_2}\| = \|\mathbf{v_1} \| = \|\mathbf{v_1'}\| ∥v2∥=∥v1∥=∥v1′∥
现在来求解:
v 1 ′ = p r o j e c t ( v 1 ′ , v 1 ) + p r o j e c t ( v 1 ′ , v 2 ) = ∥ v 1 ′ ∥ cos θ v 1 ∥ v 1 ∥ + ∥ v 1 ′ ∥ sin θ v 2 ∥ v 2 ∥ = v 1 cos θ + v 2 sin θ \begin{aligned} \mathbf{v_1'} &= project(\mathbf{v_1'}, \mathbf{v_1})+project(\mathbf{v_1'}, \mathbf{v_2}) \\ &= \|\mathbf{v_1'}\|\cos{\theta}\frac{\mathbf{v_1}}{\|\mathbf{v_1}\|} + \|\mathbf{v_1'}\|\sin{\theta}\frac{\mathbf{v_2}}{\|\mathbf{v_2}\|} \\ &= \mathbf{v_1}\cos{\theta} + \mathbf{v_2}\sin{\theta} \end{aligned} v1′=project(v1′,v1)+project(v1′,v2)=∥v1′∥cosθ∥v1∥v1+∥v1′∥sinθ∥v2∥v2=v1cosθ+v2sinθ
上式中相当于把 v 1 ′ \mathbf{v_1'} v1′ 投影到两个基向量 v 1 , v 2 \mathbf{v_1, v_2} v1,v2 上,他俩相加等于 v 1 ′ \mathbf{v_1'} v1′ ,投影的时候由于 v 1 , v 2 \mathbf{v_1, v_2} v1,v2 不是单位向量,故需要归一化,又因为 ∥ v 2 ∥ = ∥ v 1 ∥ = ∥ v 1 ′ ∥ \|\mathbf{v_2}\| = \|\mathbf{v_1} \| = \|\mathbf{v_1'}\| ∥v2∥=∥v1∥=∥v1′∥ ,故消去 ∥ v 2 ∥ , ∥ v 1 ∥ , ∥ v 1 ′ ∥ \|\mathbf{v_2}\|, \|\mathbf{v_1} \| , \|\mathbf{v_1'}\| ∥v2∥,∥v1∥,∥v1′∥ 得到 v 1 ′ \mathbf{v_1'} v1′有了前面的铺垫,最终得到 v ′ \mathbf{v'} v′ 的式子:
v ′ = v c + v 1 ′ = v c + v 1 cos θ + v 2 sin θ \begin{aligned} \mathbf{v'} &= \mathbf{v_c}+\mathbf{v_1'} \\ &= \mathbf{v_c} + \mathbf{v_1}\cos{\theta} + \mathbf{v_2}\sin{\theta} \end{aligned} v′=vc+v1′=vc+v1cosθ+v2sinθ
式子推导完成后,我们需要获得旋转矩阵的一般表达。
假设 v = ( 1 , 0 , 0 ) \mathbf{v} = (1,0,0) v=(1,0,0) , a ^ = ( a x , a y , a z ) \hat{\mathbf{a}} = (a_x,a_y,a_z) a^=(ax,ay,az)
v c = ( v ⋅ a ^ ) a ^ = ( a x 2 , a x a y , a x a z ) \begin{aligned} \mathbf{v_c} &= (\mathbf{v}\cdot\hat{\mathbf{a}})\hat{\mathbf{a}} \\ &=(a_x^2,a_xa_y,a_xa_z) \end{aligned} vc=(v⋅a^)a^=(ax2,axay,axaz)
v 1 = v − ( v ⋅ a ^ ) a ^ = ( 1 − a x 2 , − a x a y , − a x a z ) \begin{aligned} \mathbf{v_1} &= \mathbf{v} - (\mathbf{v}\cdot\hat{\mathbf{a}})\hat{\mathbf{a}} \\ &=(1-a_x^2,-a_xa_y,-a_xa_z) \end{aligned} v1=v−(v⋅a^)a^=(1−ax2,−axay,−axaz)
v 2 = v 1 × a ^ = ( − a x a y a z + a x a y a z , ( 1 − a x 2 ) a z + a x 2 a z , − ( 1 − a x 2 ) a y + a x 2 a y ) = ( 0 , a z , − a y ) \begin{aligned} \mathbf{v_2} &=\mathbf{v_1}\times \hat{\mathbf{a}} \\ &=(-a_xa_ya_z+a_xa_ya_z,(1-a_x^2)a_z+a_x^2a_z,-(1-a_x^2)a_y+a_x^2a_y)\\ &= (0, a_z, -a_y) \end{aligned} v2=v1×a^=(−axayaz+axayaz,(1−ax2)az+ax2az,−(1−ax2)ay+ax2ay)=(0,az,−ay)
v ′ = v c + v 1 ′ = v c + v 1 cos θ + v 2 sin θ = ( a x 2 , a x a y , a x a z ) + ( 1 − a x 2 , − a x a y , − a x a z ) cos θ + ( 0 , a z , − a y ) sin θ = ( a x 2 + cos θ − a x 2 cos θ , a x a y − a x a y cos θ + a z sin θ , a x a z − a x a z cos θ − a y sin θ ) = [ a x 2 ( 1 − cos θ ) + cos θ , a x a y ( 1 − cos θ ) + a z sin θ , a x a z ( 1 − cos θ ) − a y sin θ ] \begin{aligned} \mathbf{v'} &= \mathbf{v_c}+\mathbf{v_1'} \\ &= \mathbf{v_c} + \mathbf{v_1}\cos{\theta} + \mathbf{v_2}\sin{\theta}\\ &= (a_x^2,a_xa_y,a_xa_z) + (1-a_x^2,-a_xa_y,-a_xa_z)\cos{\theta} + (0, a_z, -a_y)\sin{\theta} \\ &= (a_x^2 + \cos{\theta}-a_x^2\cos{\theta}, a_xa_y-a_xa_y\cos{\theta}+a_z\sin{\theta}, a_xa_z-a_xa_z\cos{\theta}-a_y\sin{\theta}) \\ &=[a_x^2(1-\cos{\theta}) + \cos{\theta}, a_xa_y(1-\cos{\theta}) +a_z\sin{\theta},a_xa_z(1-\cos{\theta}) - a_y\sin{\theta}] \end{aligned} v′=vc+v1′=vc+v1cosθ+v2sinθ=(ax2,axay,axaz)+(1−ax2,−axay,−axaz)cosθ+(0,az,−ay)sinθ=(ax2+cosθ−ax2cosθ,axay−axaycosθ+azsinθ,axaz−axazcosθ−aysinθ)=[ax2(1−cosθ)+cosθ,axay(1−cosθ)+azsinθ,axaz(1−cosθ)−aysinθ]
设置旋转矩阵为 R \mathbf{R} R ,则 R v = v ′ \mathbf{R}\mathbf{v}=\mathbf{v'} Rv=v′
即
[ x a y a z a x b y b z b x c y c z c ] [ 1 0 0 ] = [ a x 2 ( 1 − cos θ ) + cos θ a x a y ( 1 − cos θ ) + a z sin θ a x a z ( 1 − cos θ ) − a y sin θ ] \begin{bmatrix} x_a & y_a & z_a \\ x_b & y_b & z_b \\ x_c & y_c & z_c \end{bmatrix} \begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix} = \begin{bmatrix} a_x^2(1-\cos{\theta}) + \cos{\theta} \\ a_xa_y(1-\cos{\theta}) + a_z\sin{\theta} \\ a_xa_z(1-\cos{\theta}) - a_y\sin{\theta} \end{bmatrix} ⎣⎡xaxbxcyaybyczazbzc⎦⎤⎣⎡100⎦⎤=⎣⎡ax2(1−cosθ)+cosθaxay(1−cosθ)+azsinθaxaz(1−cosθ)−aysinθ⎦⎤
通过上式可以得到旋转矩阵的第一列向量,即
R = [ x a y a z a x b y b z b x c y c z c ] = [ a x 2 ( 1 − cos θ ) + cos θ y a z a a x a y ( 1 − cos θ ) + a z sin θ y b z b a x a z ( 1 − cos θ ) − a y sin θ y c z c ] \mathbf{R}= \begin{bmatrix} x_a & y_a & z_a \\ x_b & y_b & z_b \\ x_c & y_c & z_c \end{bmatrix} =\begin{bmatrix} a_x^2(1-\cos{\theta}) + \cos{\theta} & y_a & z_a \\ a_xa_y(1-\cos{\theta}) + a_z\sin{\theta} & y_b & z_b \\ a_xa_z(1-\cos{\theta}) - a_y\sin{\theta} & y_c & z_c \end{bmatrix} R=⎣⎡xaxbxcyaybyczazbzc⎦⎤=⎣⎡ax2(1−cosθ)+cosθaxay(1−cosθ)+azsinθaxaz(1−cosθ)−aysinθyaybyczazbzc⎦⎤
同上,我们可以设 v = ( 0 , 1 , 0 ) , ( 0 , 0 , 1 ) \mathbf{v} = (0,1,0),(0,0,1) v=(0,1,0),(0,0,1) 来得到另外两个列向量的表达式。
最终的矩阵形式如下:
R = [ a x 2 ( 1 − cos θ ) + cos θ a x a y ( 1 − cos θ ) − a z sin θ a x a z ( 1 − cos θ ) + a y sin θ a x a y ( 1 − cos θ ) + a z sin θ a y 2 ( 1 − cos θ ) + cos θ a y a z ( 1 − cos θ ) − a x sin θ a x a z ( 1 − cos θ ) − a y sin θ a y a z ( 1 − cos θ ) + a x sin θ a z 2 ( 1 − cos θ ) + cos θ ] \mathbf{R} =\begin{bmatrix} a_x^2(1-\cos{\theta}) + \cos{\theta} & a_xa_y(1-\cos{\theta}) - a_z\sin{\theta} & a_xa_z(1-\cos{\theta}) + a_y\sin{\theta} \\ a_xa_y(1-\cos{\theta}) + a_z\sin{\theta} & a_y^2(1-\cos{\theta}) + \cos{\theta} & a_ya_z(1-\cos{\theta}) - a_x\sin{\theta} \\ a_xa_z(1-\cos{\theta}) - a_y\sin{\theta} & a_ya_z(1-\cos{\theta}) + a_x\sin{\theta} & a_z^2(1-\cos{\theta}) + \cos{\theta} \end{bmatrix} R=⎣⎡ax2(1−cosθ)+cosθaxay(1−cosθ)+azsinθaxaz(1−cosθ)−aysinθaxay(1−cosθ)−azsinθay2(1−cosθ)+cosθayaz(1−cosθ)+axsinθaxaz(1−cosθ)+aysinθayaz(1−cosθ)−axsinθaz2(1−cosθ)+cosθ⎦⎤
PBRT源码:
Transform Rotate(Float theta, const Vector3f &axis) {
Vector3f a = Normalize(axis);
Float sinTheta = std::sin(Radians(theta));
Float cosTheta = std::cos(Radians(theta));
Matrix4x4 m;
// Compute rotation of first basis vector
m.m[0][0] = a.x * a.x + (1 - a.x * a.x) * cosTheta;
m.m[0][1] = a.x * a.y * (1 - cosTheta) - a.z * sinTheta;
m.m[0][2] = a.x * a.z * (1 - cosTheta) + a.y * sinTheta;
m.m[0][3] = 0;
// Compute rotations of second and third basis vectors
m.m[1][0] = a.x * a.y * (1 - cosTheta) + a.z * sinTheta;
m.m[1][1] = a.y * a.y + (1 - a.y * a.y) * cosTheta;
m.m[1][2] = a.y * a.z * (1 - cosTheta) - a.x * sinTheta;
m.m[1][3] = 0;
m.m[2][0] = a.x * a.z * (1 - cosTheta) - a.y * sinTheta;
m.m[2][1] = a.y * a.z * (1 - cosTheta) + a.x * sinTheta;
m.m[2][2] = a.z * a.z + (1 - a.z * a.z) * cosTheta;
m.m[2][3] = 0;
return Transform(m, Transpose(m));
}
边栏推荐
- Fluorescein-PEG-CLS, cholesterol-polyethylene glycol-fluorescein scientific research reagent
- libnet
- 一文搞定 SQL Server 执行计划
- Creo 9.0二维草图的诊断:着色封闭环
- Cloud platform construction solutions
- Code Casual Recording Notes_Dynamic Programming_416 Segmentation and Subsetting
- RSS订阅微信公众号初探-feed43
- 栈的压入、弹出序列
- JS get parameter value of URL hyperlink
- 七夕活动浪漫上线,别让网络拖慢和小姐姐的开黑时间
猜你喜欢
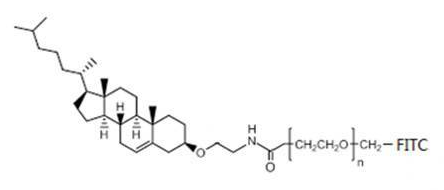
Fluorescein-PEG-CLS,胆固醇-聚乙二醇-荧光素科研试剂
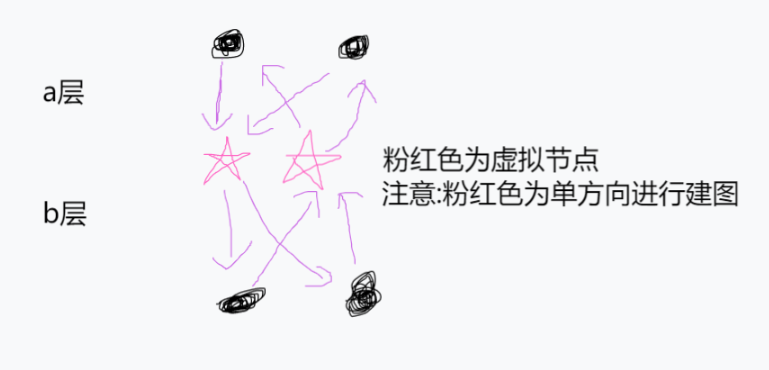
图论-虚拟节点分层建图
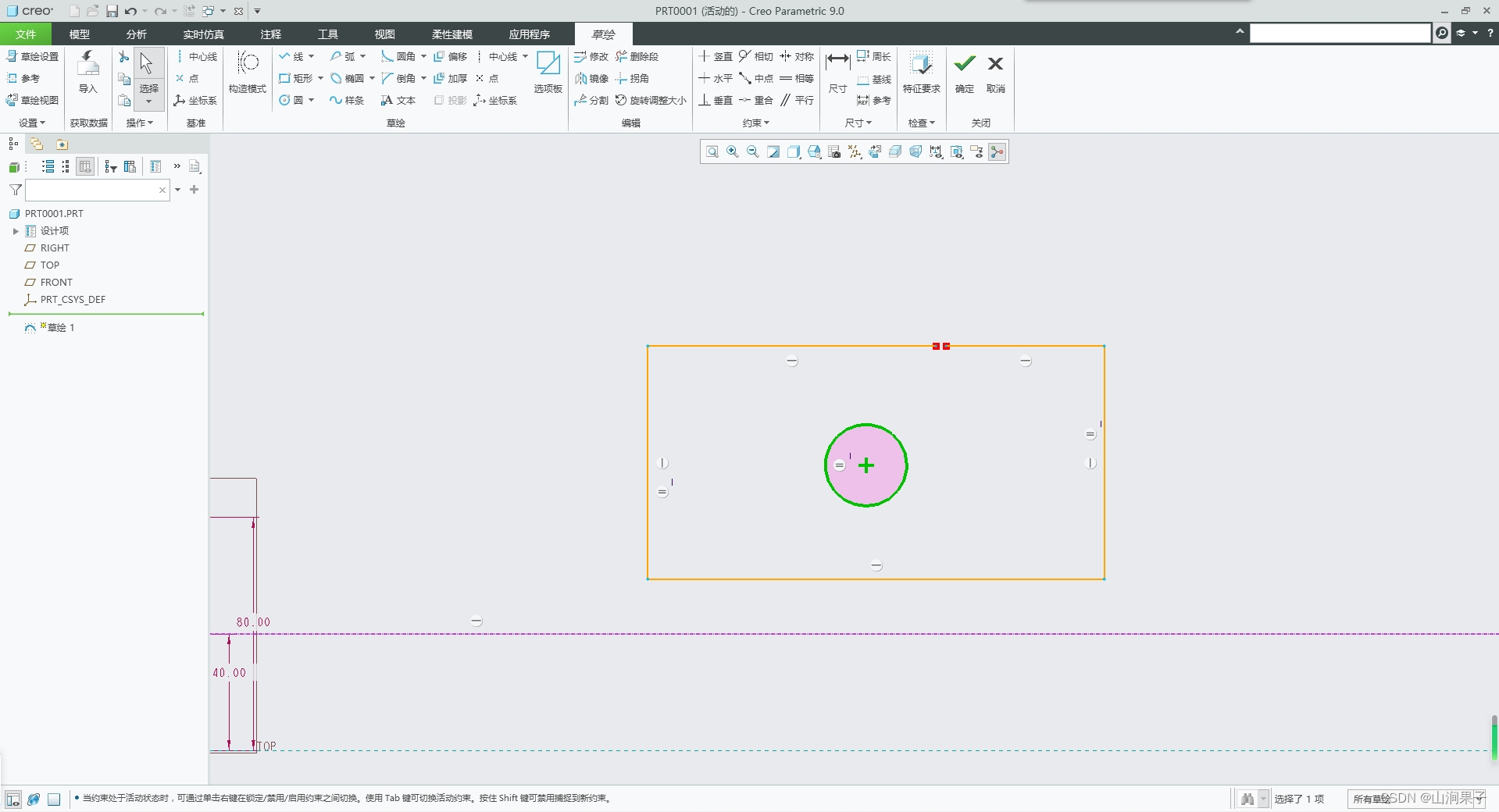
Creo 9.0二维草图的诊断:加亮开放端点
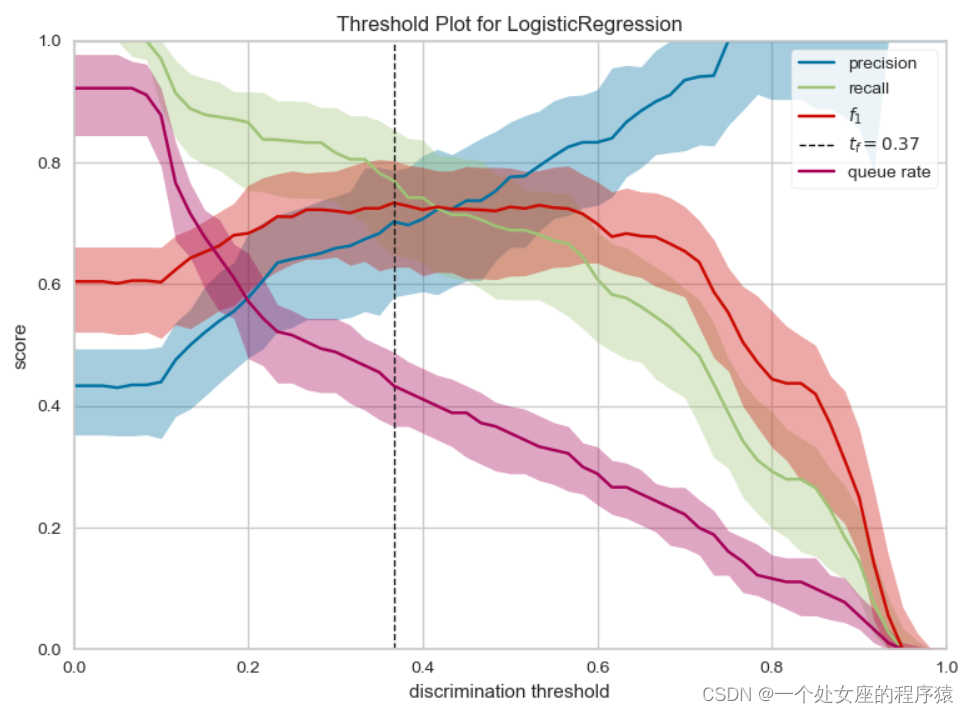
ML之yellowbrick:基于titanic泰坦尼克是否获救二分类预测数据集利用yellowbrick对LoR逻辑回归模型实现可解释性(阈值图)案例
牛客2022 暑期多校3 H Hacker(SAM + 线段树查询区间内部最大子段和)
2021年数据泄露成本报告解读
冰河又一MySQL力作出版(文末送书)!!
OpenCV 图像拼接
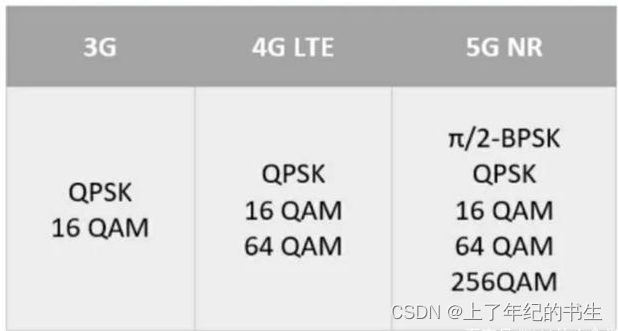
射频芯片(RFIC)的协议之5G及其调制
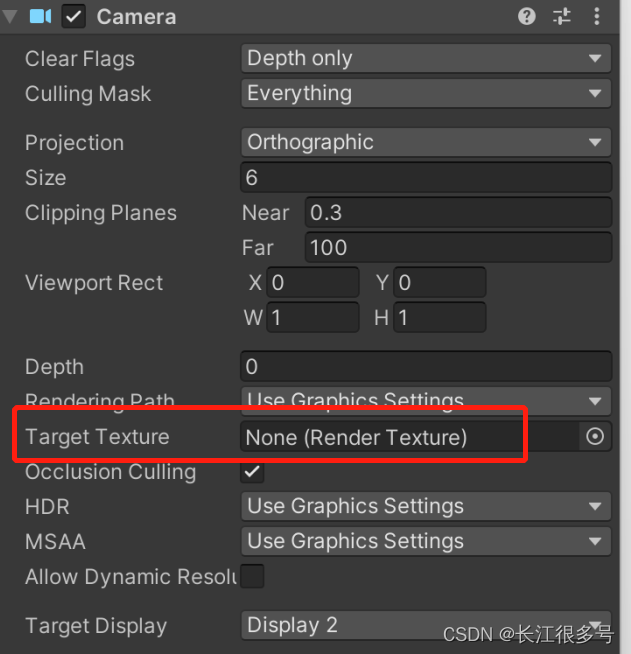
Unity intercepts 3D images and the implementation of picture-in-picture PIP
随机推荐
The principle and use of AOSP CameraLatencyHistogram
2021年数据泄露成本报告解读
- the skip/skipif Pytest learning
Creo 9.0二维草图的诊断:加亮开放端点
ts用法大全
RSS订阅微信公众号初探-feed43
Jmeter-断言
Creo 9.0创建几何点
V8中的快慢数组(附源码、图文更易理解)
OPC UA 与IEC61499 深度融合(1)
【LeetCode】最长回文子序列(动态规划)
2022/8/3 Exam Summary
Unity2021 releases WebGL fog effect disappearing problem
CAS:178744-28-0,mPEG-DSPE,DSPE-mPEG,甲氧基-聚乙二醇-磷脂酰乙醇胺供应
走迷宫 BFS
SPOJ 2774 Longest Common Substring(两串求公共子串 SAM)
完全二叉树问题
逆波兰表达式求值
【OpenCV图像处理】 图像拼接技术
libnet