当前位置:网站首页>ROS learning (IX): referencing custom message types in header files
ROS learning (IX): referencing custom message types in header files
2022-07-06 07:44:00 【biter0088】
The following describes a method of referencing custom message types in header files
1、 Custom message type
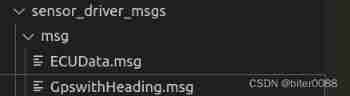
The custom message package name is :sensor_driver_msgs
The custom message type is named :GpswithHeading.msg
The file organization is :
2、 Reference in the header file
When referenced in files of other packages , It can be referenced in the header file , The format is as follows , Quoted here with “.h” ending :
#include <sensor_driver_msgs/GpswithHeading.h> // Reference the customized message type in the header file Be careful : At this time, it is already in other packages CMakeLists.txt It contains sensor_driver_msgs package
find_package(catkin REQUIRED COMPONENTS
xxx
sensor_driver_msgs
xxx
)
...
catkin_package(
INCLUDE_DIRS include
LIBRARIES xxx
CATKIN_DEPENDS xxx sensor_driver_msgs
# DEPENDS system_lib
)
...
add_dependencies(xxx_node sensor_driver_msgs_generate_messages_cpp)
边栏推荐
- Leecode-c language implementation -15 Sum of three ----- ideas to be improved
- Document 2 Feb 12 16:54
- leecode-C語言實現-15. 三數之和------思路待改進版
- Ble of Jerry [chapter]
- 数据治理:元数据管理篇
- octomap averageNodeColor函数说明
- Qualitative risk analysis of Oracle project management system
- Inspiration from the recruitment of bioinformatics analysts in the Department of laboratory medicine, Zhujiang Hospital, Southern Medical University
- Rust language - receive command line parameter instances
- 上线APS系统,破除物料采购计划与生产实际脱钩的难题
猜你喜欢
![Ble of Jerry [chapter]](/img/00/27486ad68bf491997d10e387c32dd4.png)
Ble of Jerry [chapter]
![[MySQL learning notes 30] lock (non tutorial)](/img/9b/1e27575d83ff40bebde118b925f609.png)
[MySQL learning notes 30] lock (non tutorial)
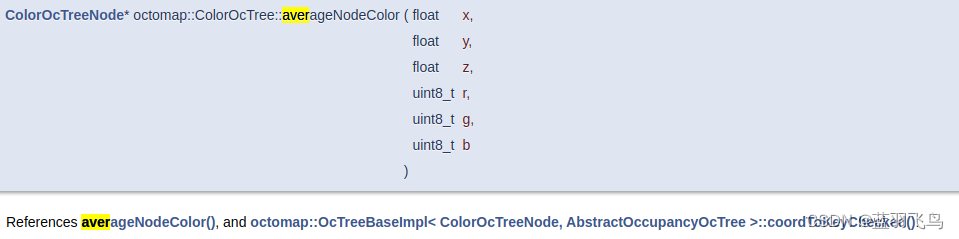
octomap averageNodeColor函数说明
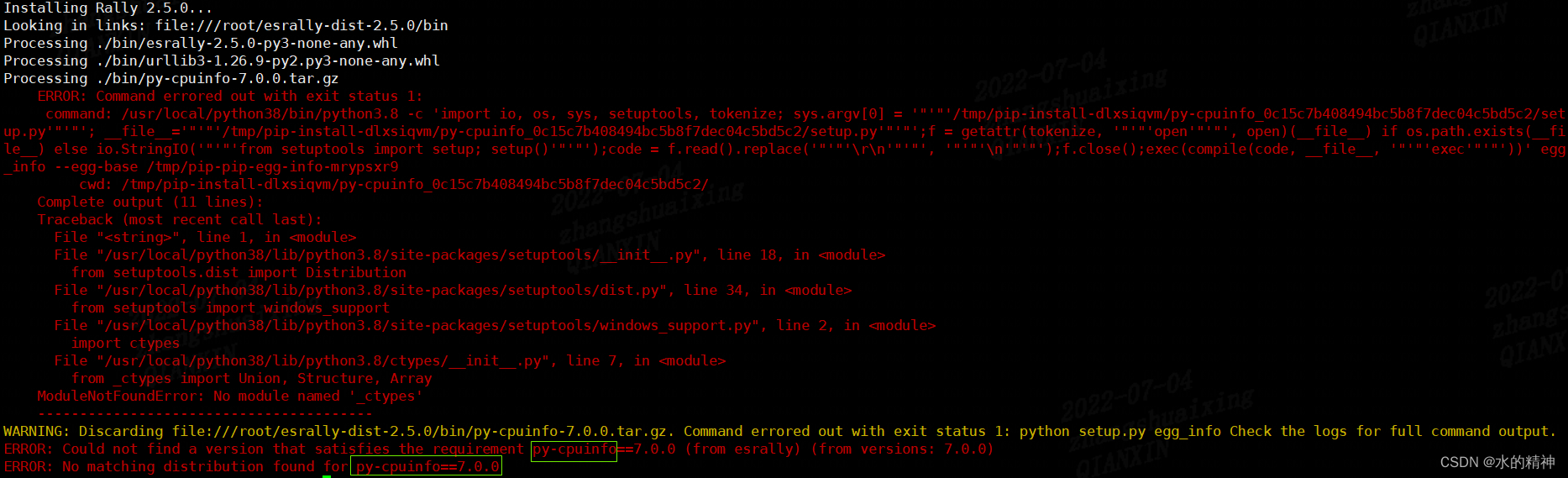
Esrally domestic installation and use pit avoidance Guide - the latest in the whole network

数字经济时代,如何保障安全?
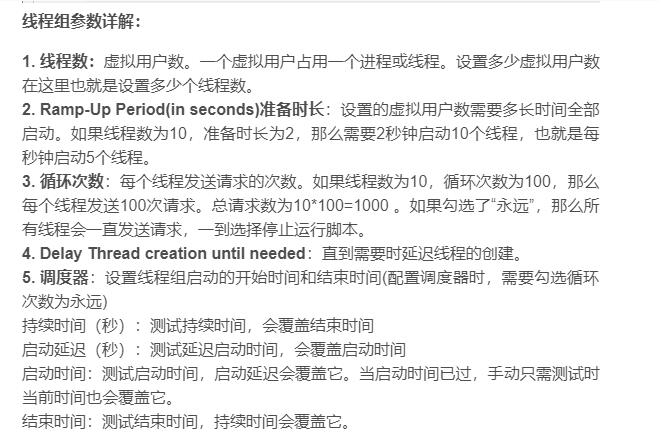
JMeter performance test steps practical tutorial
![DataX self check error /datax/plugin/reader/_ drdsreader/plugin. Json] does not exist](/img/17/415e66d67afb055e94a966de25c2bc.png)
DataX self check error /datax/plugin/reader/_ drdsreader/plugin. Json] does not exist

合规、高效,加快药企数字化转型,全新打造药企文档资源中心
Bugku CTF daily question: do you want seeds? Blackmailed
Significance and measures of encryption protection for intelligent terminal equipment
随机推荐
Launch APS system to break the problem of decoupling material procurement plan from production practice
Ble of Jerry [chapter]
word中把带有某个符号的行全部选中,更改为标题
js对象获取属性的方法(.和[]方式)
Cf1036c class numbers solution
Onie supports pice hard disk
[cf gym101196-i] waif until dark network maximum flow
C intercept string
[CF Gym101196-I] Waif Until Dark 网络最大流
Ali's redis interview question is too difficult, isn't it? I was pressed on the ground and rubbed
Description of octomap averagenodecolor function
实现精细化生产, MES、APS、ERP必不可少
C # display the list control, select the file to obtain the file path and filter the file extension, and RichTextBox displays the data
Leecode-c language implementation -15 Sum of three ----- ideas to be improved
MES, APS and ERP are essential to realize fine production
Sélectionnez toutes les lignes avec un symbole dans Word et changez - les en titre
TS 体操 &(交叉运算) 和 接口的继承的区别
解决方案:智慧工地智能巡檢方案視頻監控系統
数据治理:元数据管理篇
软件开发的一点随记