当前位置:网站首页>[ROS] The software package of the industrial computer does not compile
[ROS] The software package of the industrial computer does not compile
2022-08-02 14:18:00 【CynalFly】

Is the software package of the industrial computer not compiled?
1. Reason for the problem
After searching, it is found that the system time of the industrial computer is wrong, which is caused by the time disorder when there is no connection to the Internet for a long time.
As for why the code cannot be compiled, it is due to the compilation rules:
Last Modified>This Modified: Not Compilingthis modification time>current system time: not compiling
2. Solutions
is very simple, directly modify the server system time: sudo data -s [date] [time].
For example:
sudo date -s "2022-7-31 20:00:00"边栏推荐
猜你喜欢

世界上最大的开源基金会 Apache 是如何运作的?
海明校验码纠错设计原理
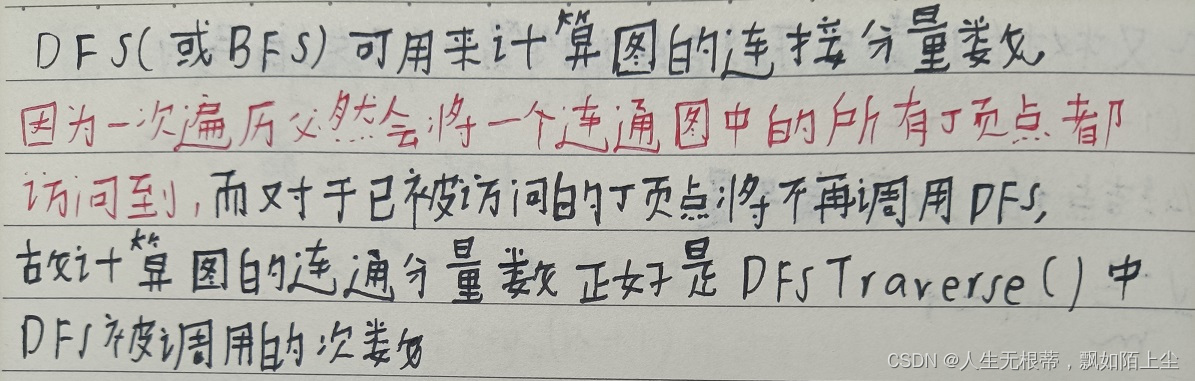
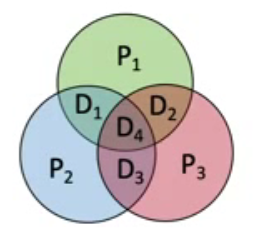
数据机构---第六章图---图的遍历---选择题
Supervision strikes again, what about the market outlook?2021-05-22
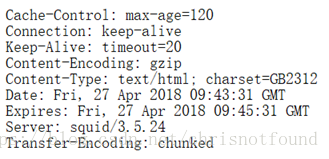
理解TCP长连接(Keepalive)
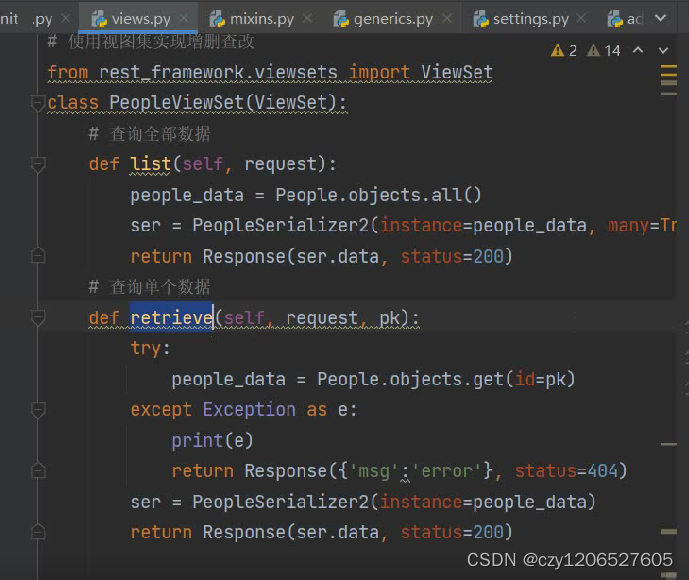
第十四单元 视图集及路由
第五单元 保持状态

Break the limit of file locks and use storage power to help enterprises grow new momentum
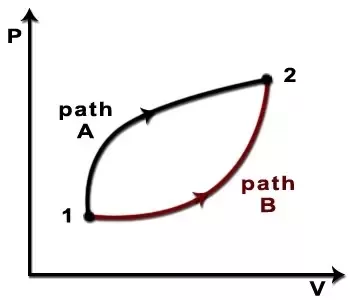
不精确微分/不完全微分(Inexact differential/Imperfect differential)
关于市场后市的发展预测? 2021-05-23
随机推荐
关于密码加密的一点思路
Swagger 的使用
Unit 4 Routing Layer
About the development forecast of the market outlook?2021-05-23
Break the limit of file locks and use storage power to help enterprises grow new momentum
logback源码阅读(一)获取ILoggerFactory、Logger
8576 顺序线性表的基本操作
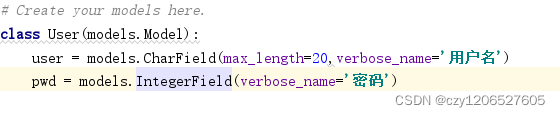
Unit 7 ORM table relationships and operations
Diodes and their applications
第三单元 视图层
Raft对比ZAB协议
跑跑yolov5吧
动手学ocr(一)
rpm包的卸载与安装[通俗易懂]
RKMPP API安装使用总结
[ROS]roscd和cd的区别
瑞吉外卖笔记——第10讲Swagger
What are the file encryption software?Keep your files safe
ZABBIX配置邮件报警和微信报警
Data Organization---Chapter 6 Diagram---Graph Traversal---Multiple Choice Questions