
边栏推荐
- 2020 "Lenovo Cup" National College programming online Invitational Competition and the third Shanghai University of technology programming competition
- notepad++
- 【日常训练】1200. 最小绝对差
- [daily training] 1200 Minimum absolute difference
- [code practice] [stereo matching series] Classic ad census: (5) scan line optimization
- Hello everyone, welcome to my CSDN blog!
- AdaBoost use
- 编辑器-vi、vim的使用
- 生成对抗网络
- 多元线性回归(梯度下降法)
猜你喜欢
![[daiy4] copy of JZ35 complex linked list](/img/bc/ce90bb3cb6f52605255f1d6d6894b0.png)
[daiy4] copy of JZ35 complex linked list
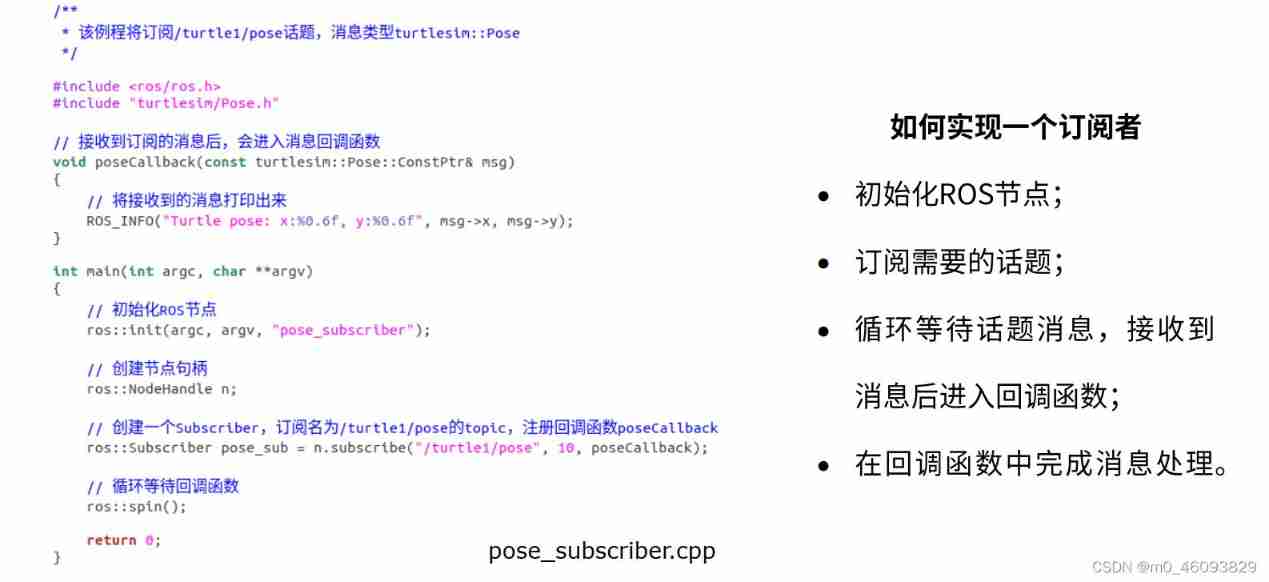
Programming implementation of subscriber node of ROS learning 3 subscriber
![Introduction Guide to stereo vision (3): Zhang calibration method of camera calibration [ultra detailed and worthy of collection]](/img/d8/39020b1ce174299f60b6f278ae0b91.jpg)
Introduction Guide to stereo vision (3): Zhang calibration method of camera calibration [ultra detailed and worthy of collection]
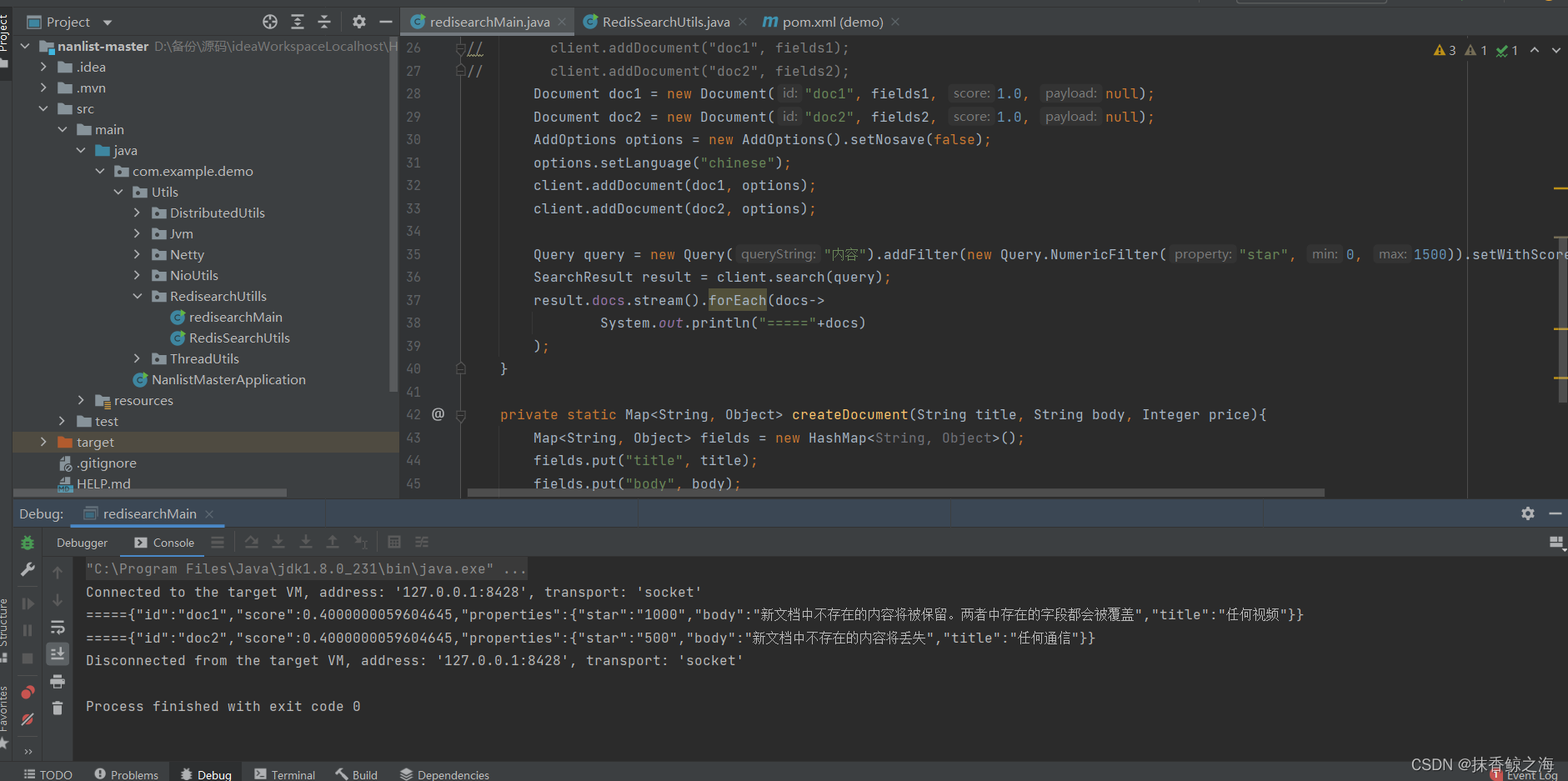
Redis实现高性能的全文搜索引擎---RediSearch

Halcon clolor_ pieces. Hedv: classifier_ Color recognition
![Introduction Guide to stereo vision (5): dual camera calibration [no more collection, I charge ~]](/img/68/6bfa390b0bedcdbc4afba2f9bd9c0f.jpg)
Introduction Guide to stereo vision (5): dual camera calibration [no more collection, I charge ~]
![Rebuild my 3D world [open source] [serialization-3] [comparison between colmap and openmvg]](/img/7d/e7370e757c18b3dbb47e633703c346.jpg)
Rebuild my 3D world [open source] [serialization-3] [comparison between colmap and openmvg]
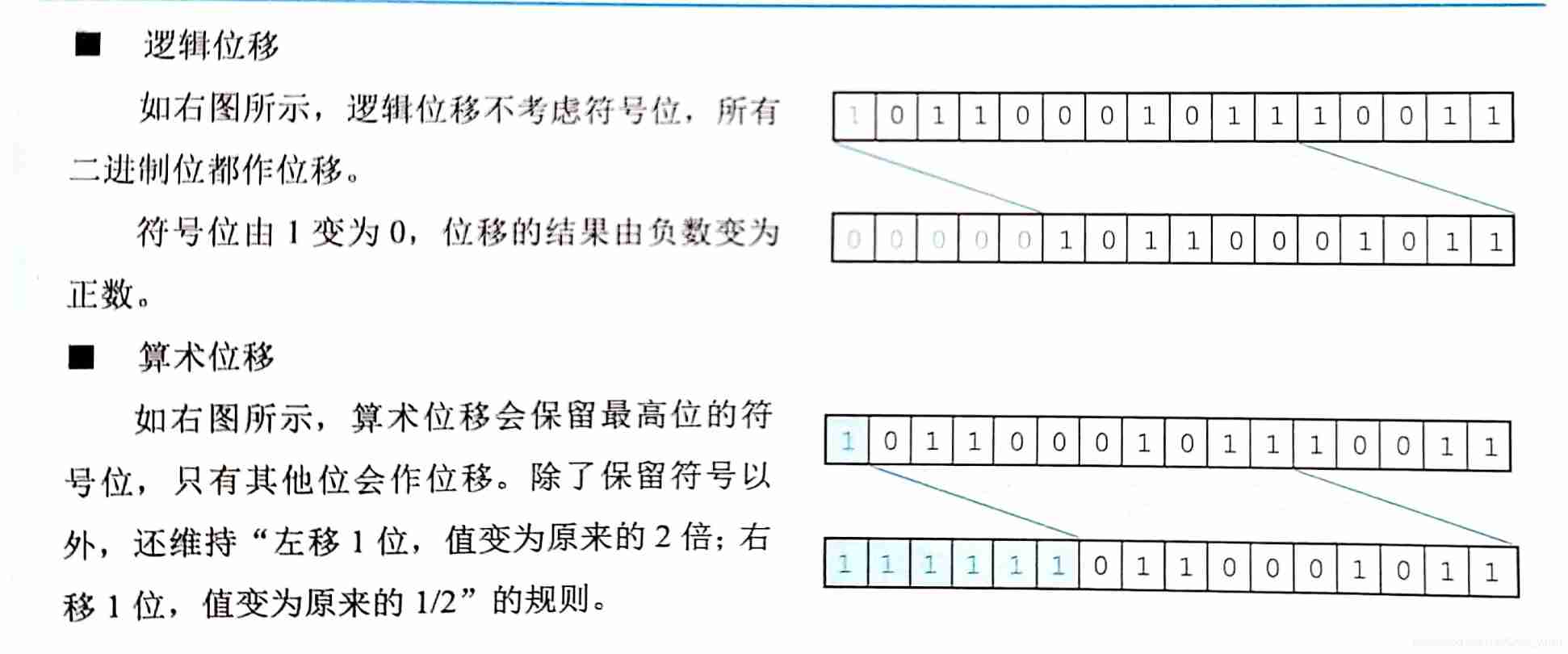
Shift operation of complement
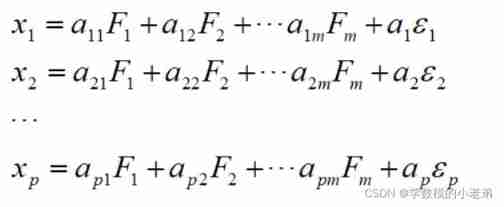
Mathematical modeling: factor analysis

Programming implementation of ROS learning 2 publisher node
随机推荐
资源变现小程序添加折扣充值和折扣影票插件
Solutions of ordinary differential equations (2) examples
Mengxin summary of LCs (longest identical subsequence) topics
File server migration scheme of a company
AUTOSAR从入门到精通100讲(103)-dbc文件的格式以及创建详解
Introduction Guide to stereo vision (5): dual camera calibration [no more collection, I charge ~]
Yolov4 target detection backbone
Ros-11 common visualization tools
LLVM之父Chris Lattner:为什么我们要重建AI基础设施软件
Halcon Chinese character recognition
Digital analog 1: linear programming
Pytorch entry record
Halcon shape_ trans
Mengxin summary of LIS (longest ascending subsequence) topics
Array, date, string object method
asp.net(c#)的货币格式化
容易混淆的基本概念 成员变量 局部变量 全局变量
JS asynchronous error handling
location search 属性获取登录用户名
C#【必备技能篇】ConfigurationManager 类的使用(文件App.config的使用)