当前位置:网站首页>Programming implementation of ROS learning 2 publisher node
Programming implementation of ROS learning 2 publisher node
2022-07-05 08:45:00 【m0_ forty-six million ninety-three thousand eight hundred and t】
One . Overview of the topic release process :
1. Create topic file .cpp/.py
2. compile .cpp The file needs to be compiled ,.py File is not required
3. Configure environment variables
4. Execute the release topic file
Two 、 The specific process is as follows :
2.1 Create topic file
In the function package of the corresponding workspace Src Next , Create topic file , If you use c++ Write , Namely .cpp file , use py Writing is .py file .
The document consists of at least four parts :
1. initialization ROS node
2. towards Ros Master Register node information , Including the topic name and topic message type (ROS Official or customized messages , How to view ros The message structure provided by the system is detailed in the document :ROS Study 3 Custom message _m0_46093829 The blog of -CSDN Blog )
3. Create message data ( Whether it's official or customized , In the message type file (.msg file ) Only variables and their data types are declared in , So you need to wait for variables here ......)
4. Circulate messages at a certain frequency
See the following for specific examples , This routine is Gu Yueju ROS21 Tell me an example .

2.2 compile
After saving the file , It's time to compile , Be careful cpp The file needs to be compiled ,py File is not required . The specific compilation method is :
2.2.1 Set Compilation Rules
Go back to the function package directory , find CMakeLists.txt( Set Compilation Rules ), Then copy the following two lines of code to Install above
add_executable( File name src/ File name .cpp)# Set the name of the code file to be compiled and the generated executable , That is, which program file is compiled into an executable file
target_link_libraries(velocity_publisher${catkin_LIBRARIES})# Set up link library , Put your executable file and ROS Make a link to the library in .
2.2.2 catkin_make
After modification, you can return to the root directory of the workspace to compile .catkin_make
2.3 Configure environment variables
Compile and then use source Configure an environment variable OK 了 .source devel/setup.bash
The specific compilation and configuration environment variables are in ROS Learning notes 1 In the introduction .
3、 ... and 、 Execute the topic file to publish the topic :
rosrun Folder name file name
边栏推荐
- Go dependency injection -- Google open source library wire
- Bluebridge cup internet of things competition basic graphic tutorial - clock selection
- Infected Tree(树形dp)
- Run菜单解析
- Pytorch entry record
- 轮子1:QCustomPlot初始化模板
- 多元线性回归(梯度下降法)
- Bit operation related operations
- Five design details of linear regulator
- Some pitfalls of win10 network sharing
猜你喜欢
Hello everyone, welcome to my CSDN blog!
![[matlab] matlab reads and writes Excel](/img/80/78e4c7fcd27473526e480d4b930e2c.jpg)
[matlab] matlab reads and writes Excel
C# LINQ源码分析之Count
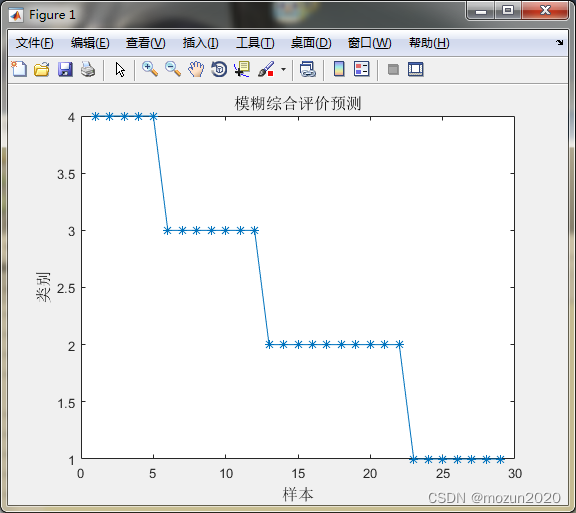
Matlab tips (28) fuzzy comprehensive evaluation

Guess riddles (8)
猜谜语啦(7)
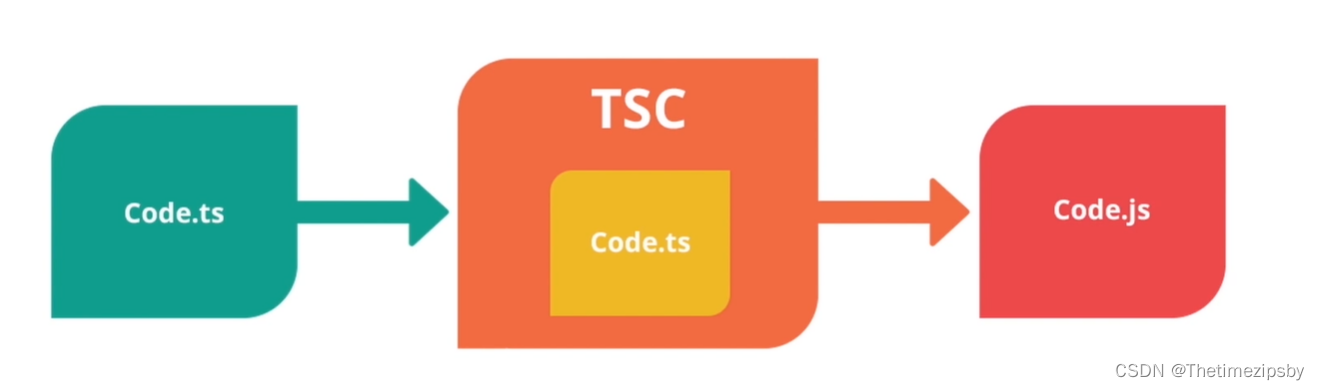
Typescript hands-on tutorial, easy to understand
Halcon blob analysis (ball.hdev)
How to manage the performance of R & D team?
![[noi simulation] juice tree (tree DP)](/img/19/bc71e8dc3958e4cb87b31423a74617.png)
[noi simulation] juice tree (tree DP)
随机推荐
My university
猜谜语啦(5)
leetcode - 445. Add two numbers II
Typical low code apaas manufacturer cases
Run菜单解析
Example 008: 99 multiplication table
Five design details of linear regulator
Lori remote control LEGO motor
【日常训练--腾讯精选50】557. 反转字符串中的单词 III
Halcon Chinese character recognition
Halcon clolor_ pieces. Hedv: classifier_ Color recognition
Infix expression evaluation
Numpy 小坑:维度 (n, 1) 和 维度 (n, ) 数组相加运算后维度变为 (n, n)
Business modeling of software model | vision
Digital analog 1: linear programming
Business modeling of software model | overview
319. 灯泡开关
轮子1:QCustomPlot初始化模板
U8g2 drawing
深度学习模型与湿实验的结合,有望用于代谢通量分析