当前位置:网站首页>ROS bridge notes (05) - Carla_ ackermann_ Control function package (convert Ackermann messages into carlaegovehiclecontrol messages)
ROS bridge notes (05) - Carla_ ackermann_ Control function package (convert Ackermann messages into carlaegovehiclecontrol messages)
2022-07-07 08:07:00 【wohu1104】
Official website :https://carla.readthedocs.io/projects/ros-bridge/en/latest/carla_ackermann_control/
Reference resources :https://blog.csdn.net/dfman1978/article/details/125077551
carla_ackermann_control Package usage Ackermann messages control CARLA vehicle . The package will Ackermann messages Convert to CarlaEgoVehicleControl news .
It is from CARLA Read vehicle information , And pass this information to a person based on Python Of PID controller , be called simple-pid , To control acceleration and speed .
stay ros_bridge in , Besides using manual_control Bao Lai directly uses the keyboard to control the simulation car , You can also use ackermann( Ackerman ) To control . stay carla and autoware In the process of joint simulation ,autoware The final control information is to be converted into ackermann Control command , Finally, control the simulation vehicle .
1. Configuration parameters
In the use of ROS 1 and ROS 2 when , Can be in The configuration file Initial setting parameters in , Pass... At run time ROS 1 Dynamically reconfigure parameters dynamic_reconfigure.
2. Test control messages
adopt topic /carla/<ROLE NAME>/ackermann_cmd Send commands to the trolley to test the settings . for example , Run the following command , Name the role as ego_vehicle Self vehicle with 10 rice / Move forward at the speed of seconds :
rostopic pub /carla/ego_vehicle/ackermann_cmd ackermann_msgs/AckermannDrive \
"{steering_angle: 0.0, steering_angle_velocity: 0.0, speed: 10, acceleration: 0.0, jerk: 0.0}" -r 10
Or let the vehicle 1.22 The angle of the arc moves forward when turning :
rostopic pub /carla/ego_vehicle/ackermann_cmd ackermann_msgs/AckermannDrive \
"{steering_angle: 1.22, steering_angle_velocity: 0.0, speed: 10, acceleration: 0.0, jerk: 0.0}" -r 10
After the above command is executed , adopt rostopic Command view , The topic The vehicle will not move without subscribers .
[email protected]:~/tool$ rostopic info /carla/ego_vehicle/ackermann_cmd
Type: ackermann_msgs/AckermannDrive
Publishers:
* /rostopic_16525_1657090091755 (http://wohu-pc:39319/)
Subscribers: None
[email protected]:~/tool$
among /carla/ego_vehicle/ackermann_cmd It was sent ackermann command , The node parses this command , And then convert to ros_bridge Message formats that nodes can recognize :/carla/ego_vehicle/vehicle_conttrol_cmd, issue /carla_ros_bridge node .
Can be in carla-ros-bridge/catkin_ws/src/ros-bridge/carla_ros_bridge/src/carla_ros_bridge/ego_vehicle.py See in the code
self.control_subscriber = node.new_subscription(
CarlaEgoVehicleControl,
self.get_topic_prefix() + "/vehicle_control_cmd",
lambda data: self.control_command_updated(data, manual_override=False),
qos_profile=10)
self.manual_control_subscriber = node.new_subscription(
CarlaEgoVehicleControl,
self.get_topic_prefix() + "/vehicle_control_cmd_manual",
lambda data: self.control_command_updated(data, manual_override=True),
qos_profile=10)
The real execution function is control_command_updated, It reads as follows :
def control_command_updated(self, ros_vehicle_control, manual_override):
""" Receive a CarlaEgoVehicleControl msg and send to CARLA This function gets called whenever a ROS CarlaEgoVehicleControl is received. If the mode is valid (either normal or manual), the received ROS message is converted into carla.VehicleControl command and sent to CARLA. This bridge is not responsible for any restrictions on velocity or steering. It's just forwarding the ROS input to CARLA :param manual_override: manually override the vehicle control command :param ros_vehicle_control: current vehicle control input received via ROS :type ros_vehicle_control: carla_msgs.msg.CarlaEgoVehicleControl :return: """
if manual_override == self.vehicle_control_override:
vehicle_control = VehicleControl()
vehicle_control.hand_brake = ros_vehicle_control.hand_brake
vehicle_control.brake = ros_vehicle_control.brake
vehicle_control.steer = ros_vehicle_control.steer
vehicle_control.throttle = ros_vehicle_control.throttle
vehicle_control.reverse = ros_vehicle_control.reverse
vehicle_control.manual_gear_shift = ros_vehicle_control.manual_gear_shift
vehicle_control.gear = ros_vehicle_control.gear
self.carla_actor.apply_control(vehicle_control)
self._vehicle_control_applied_callback(self.get_id())
The notes clearly explain receive CarlaEgoVehicleControl news , Send to CARLA.
self.carla_actor.apply_control(vehicle_control)
This function is to control the simulation vehicle .
3. summary
The package will Ackermann messages Convert to CarlaEgoVehicleControl News , Actually ROS Bridge Is used in CarlaEgoVehicleControl Message sent to CARLA Of , So if it is ROS And Autoware Then you should use this package , If it is docking with other systems , such as Apollo, Then just Apollo The corresponding message of is transformed into CarlaEgoVehicleControl The format is just .
4. ROS API
4.1 Subscriptions
| Topic | Type | Description |
|---|---|---|
| /carla//ackermann_cmd | ackermann_msgs.AckermannDrive | Subscriber for steering commands |
4.2 Publications
| Topic | Type | Description |
|---|---|---|
| /carla//ackermann_control/control_info | carla_ackermann_control.EgoVehicleControlInfo | The current values used within the controller (useful for debugging) |
边栏推荐
- C语言二叉树与建堆
- 运放电路的反馈电阻上并联一个电容是什么作用
- 2022焊工(初级)判断题及在线模拟考试
- LeetCode 90:子集 II
- Linux server development, redis protocol and asynchronous mode
- Zsh shell adds automatic completion and syntax highlighting
- Empire CMS collection Empire template program general
- 【VHDL 并行语句执行】
- 【数字IC验证快速入门】17、SystemVerilog学习之基本语法4(随机化Randomization)
- 调用 pytorch API完成线性回归
猜你喜欢
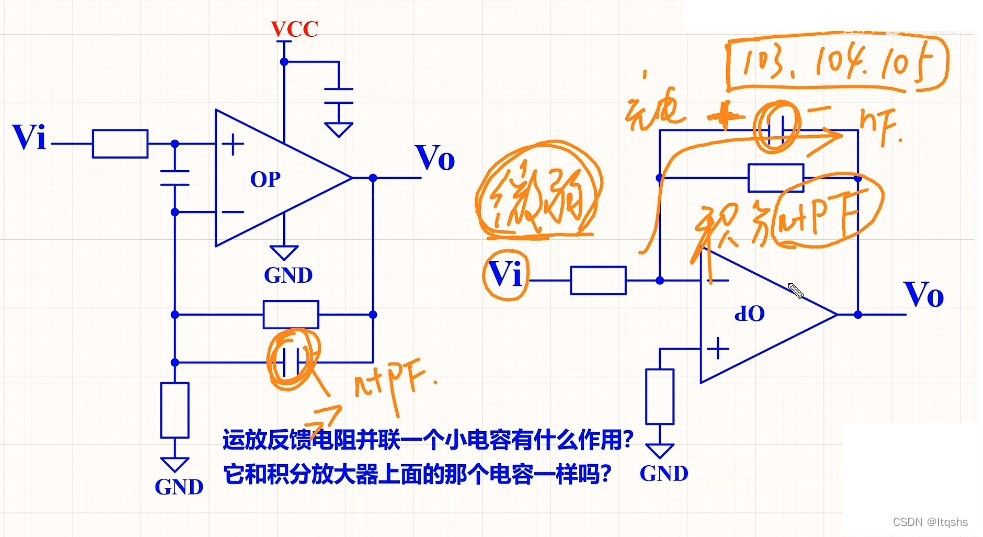
运放电路的反馈电阻上并联一个电容是什么作用
追风赶月莫停留,平芜尽处是春山
Linux server development, redis protocol and asynchronous mode
Network learning (II) -- Introduction to socket

JSON data flattening pd json_ normalize
Who has docker to install MySQL locally?
Open source ecosystem | create a vibrant open source community and jointly build a new open source ecosystem!

【數字IC驗證快速入門】15、SystemVerilog學習之基本語法2(操作符、類型轉換、循環、Task/Function...內含實踐練習)

快解析内网穿透助力外贸管理行业应对多种挑战
微信小程序基本组件使用介绍
随机推荐
Record a stroke skin bone error of the skirt
Chip information website Yite Chuangxin
【数字IC验证快速入门】17、SystemVerilog学习之基本语法4(随机化Randomization)
青龙面板-今日头条
[UVM practice] Chapter 2: a simple UVM verification platform (2) only driver verification platform
Thinkcmf6.0安装教程
快解析内网穿透为文档加密行业保驾护航
Thinkcmf6.0 installation tutorial
Recursive method constructs binary tree from middle order and post order traversal sequence
[UVM foundation] what is transaction
Most elements
2022 Inner Mongolia latest advanced fire facility operator simulation examination question bank and answers
C语言队列
Example of file segmentation
Dedecms collects content without writing rules
【數字IC驗證快速入門】15、SystemVerilog學習之基本語法2(操作符、類型轉換、循環、Task/Function...內含實踐練習)
[advanced digital IC Verification] command query method and common command interpretation of VCs tool
大视频文件的缓冲播放原理以及实现
Recursive method to construct binary tree from preorder and inorder traversal sequence
Paddlepaddle 29 dynamically modify the network structure without model definition code (relu changes to prelu, conv2d changes to conv3d, 2D semantic segmentation model changes to 3D semantic segmentat