当前位置:网站首页>3D激光slam:LeGO-LOAM---地面点提取方法及代码分析
3D激光slam:LeGO-LOAM---地面点提取方法及代码分析
2022-08-02 10:00:00 【华为云】
前言
地面点提取方法
LeGO-LOAM中前端改进中很重要的一点就是充分利用地面点,本片博客主要讲解 如何进行地面点提取
如下图所示,相邻的两个scan的同一列,打在地面上,形成两个点A和B。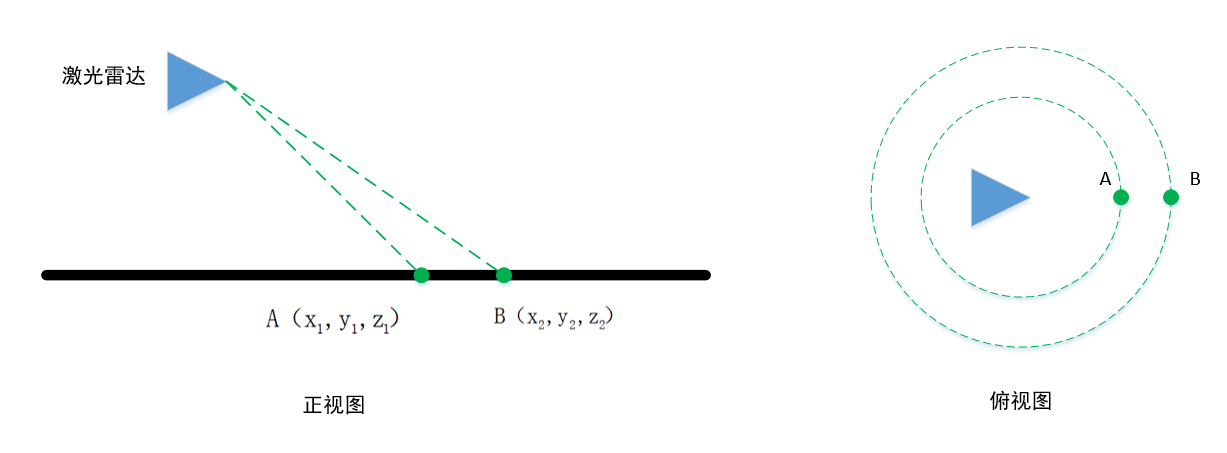
它们的垂直高度差为h,这个值在理想情况(雷达水平安装,地面是水平的)接近于0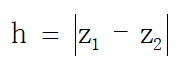
水平距离差d
和水平面的夹角为
如果为地面点,在理想情况下,这个角点接近0.
但是雷达的安装不会完全水平,并且地面也不是平的,因此这个角度会大于0,LeGO-LOAM设置的是10°。
即小于10°被判断为地面点
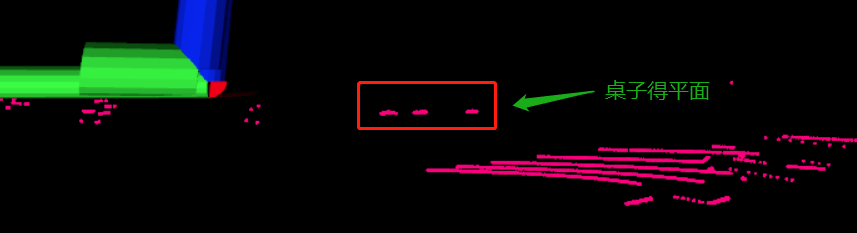
这种地面点的提取算法有些过于简单,还可以结合激光雷达安装高度,等其它信息进行判断。例如下面这种情况,也会被判断为地面点: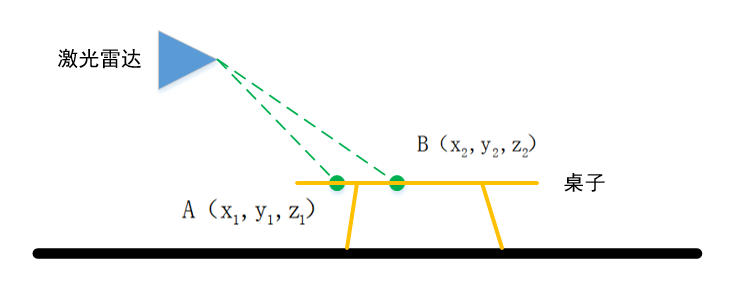
代码分析
LeGO-LOAM的地面提取的代码在 imageProjection.cpp 中 groundRemoval 函数
void groundRemoval(){ size_t lowerInd, upperInd; float diffX, diffY, diffZ, angle;lowerInd, upperInd 是相邻scan上点的索引值
diffX, diffY, diffZ, angle 是 dx dy dz 水平角
for (size_t j = 0; j < Horizon_SCAN; ++j){//遍历水平方向的点 360/0.2 1800个点 for (size_t i = 0; i < groundScanInd; ++i){//groundScanInd 为8 地面点不能在上面嵌套两个for循环, 列要在前面,因为要计算同一列的值
第一行,遍历水平方向的点 360/0.2 1800个点
第二行,groundScanInd 为8 地面点不能在上面
lowerInd = j + ( i )*Horizon_SCAN;//下面的点 upperInd = j + (i+1)*Horizon_SCAN;//上面的点计算的两个点的索引
Horizon_SCAN为1800,
if (fullCloud->points[lowerInd].intensity == -1 || fullCloud->points[upperInd].intensity == -1){ // no info to check, invalid points groundMat.at<int8_t>(i,j) = -1;//标志位 至-1 continue; } 判断两个点是否有效,点无效的话intensity为-1
有一个点无效的话 标志位 至-1
diffX = fullCloud->points[upperInd].x - fullCloud->points[lowerInd].x;//dx diffY = fullCloud->points[upperInd].y - fullCloud->points[lowerInd].y;//dy diffZ = fullCloud->points[upperInd].z - fullCloud->points[lowerInd].z;//dz angle = atan2(diffZ, sqrt(diffX*diffX + diffY*diffY) ) * 180 / M_PI;//计算水平角度计算 dx dy dz 和水平角,就是这个公式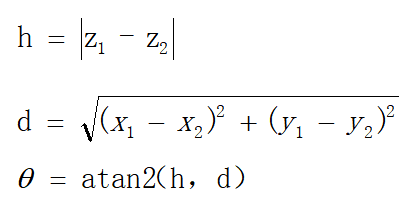
if (abs(angle - sensorMountAngle) <= 10){ groundMat.at<int8_t>(i,j) = 1; groundMat.at<int8_t>(i+1,j) = 1; } } }sensorMountAngle 是 liadr 是和水平面的倾斜角
这里就是把那两个点的水平角,和10°做比较,判断是不是地面点
如何使把标志位 至 1
for (size_t i = 0; i < N_SCAN; ++i){ for (size_t j = 0; j < Horizon_SCAN; ++j){ if (groundMat.at<int8_t>(i,j) == 1 || rangeMat.at<float>(i,j) == FLT_MAX){ labelMat.at<int>(i,j) = -1;//labelMat 至为 -1 ,不参与后续线特征和面特征的提取 } } }判断完地面点后,再遍历每个点,
如过该点是 地面点或者无效点,则把 labelMat 上的该点标志位至-1 .
labelMat 至为 -1 ,不参与后续线特征和面特征的提取
//地面点可视化 if (pubGroundCloud.getNumSubscribers() != 0){//如果有节点要订阅这个地面点的topic 再进行发布 for (size_t i = 0; i <= groundScanInd; ++i){ for (size_t j = 0; j < Horizon_SCAN; ++j){ if (groundMat.at<int8_t>(i,j) == 1) groundCloud->push_back(fullCloud->points[j + i*Horizon_SCAN]);//把点加在 地面点点云中 之后会发布出去 } } } }最后进行地面点得可视化
如果有节点要订阅这个地面点的topic 再进行发布
遍历0-groundScanInd 上得每个点,判断如果是地面点,则添加该点到 groundCloud 中
之后会被发布出去
发布得在这个地方
// original dense ground cloud if (pubGroundCloud.getNumSubscribers() != 0){ pcl::toROSMsg(*groundCloud, laserCloudTemp); laserCloudTemp.header.stamp = cloudHeader.stamp; laserCloudTemp.header.frame_id = "base_link"; pubGroundCloud.publish(laserCloudTemp); }topic得名称是/ground_cloud
pubGroundCloud = nh.advertise<sensor_msgs::PointCloud2> ("/ground_cloud", 1);gazebo测试
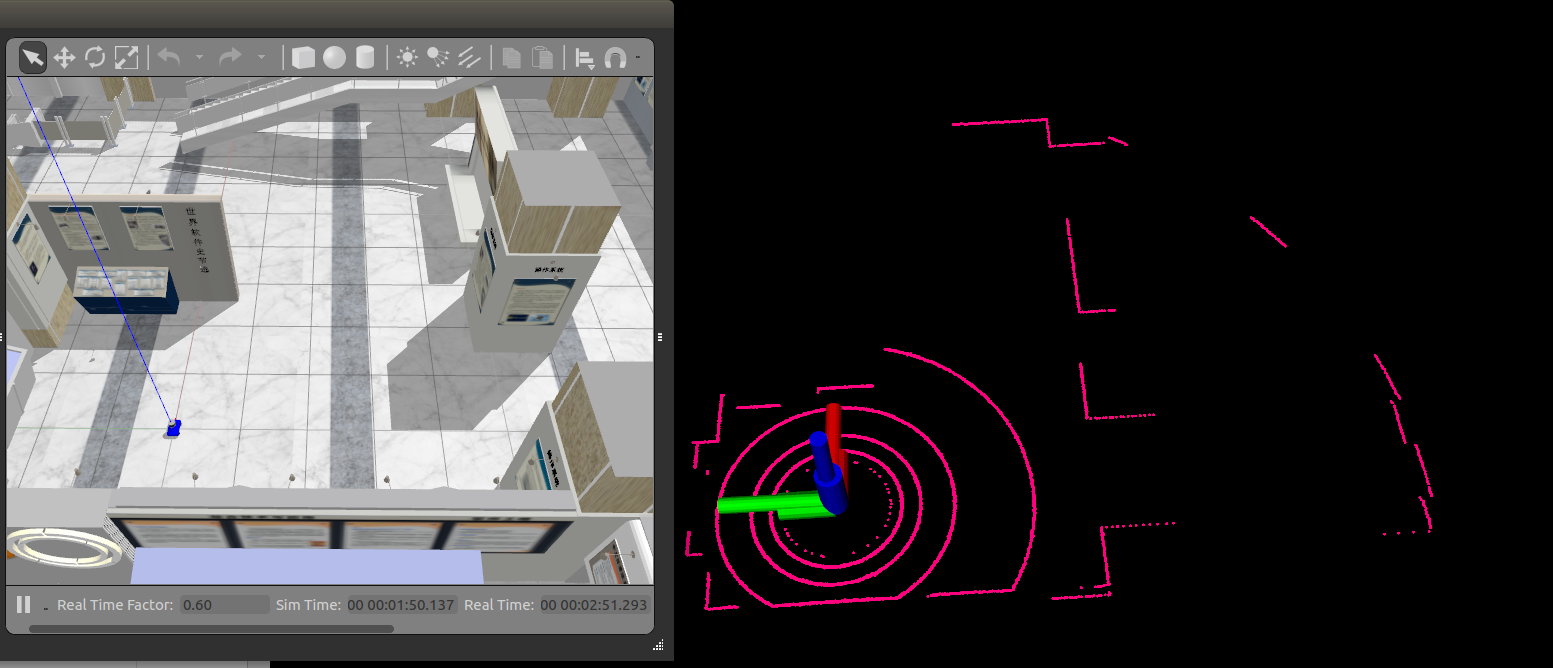
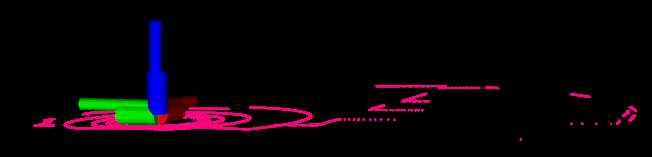
效果还是挺好得,没有出现异常点
但是由于没有加入高度得判断,在前面里说得这种情况则会出现问题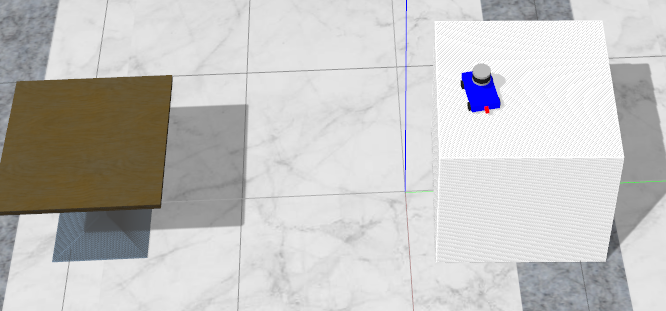
边栏推荐
- The realization of the list
- You Only Hypothesize Once: 用旋转等变描述子估计变换做点云配准(已开源)
- 【技术分享】OSPFv3基本原理
- c#反射和特性
- R语言使用ggpubr包的ggtexttable函数可视化表格数据(直接绘制表格图或者在图像中添加表格数据)、设置theme主题参数自定义表格中表头内容的填充色(使用colnames.style参数)
- iNFTnews | Seeing the two sides of the metaverse, what is the true Internet and the Internet of value?
- 未知内容监控
- 向量点积(Dot Product),向量叉积(Cross Product)
- 软件测试与质量 之白盒测试
- 基于列表的排队与叫号系统
猜你喜欢

基于列表的排队与叫号系统
【新版干货书】深度伪造 (DeepFakes):创造,检测和影响

Do you agree with this view?Most businesses are digitizing just to ease anxiety

用汇编实现爱心特效【七夕来袭】

The k-nearest neighbor method in the notes of Li Hang's "Statistical Learning Methods"
软件测试与质量 之白盒测试
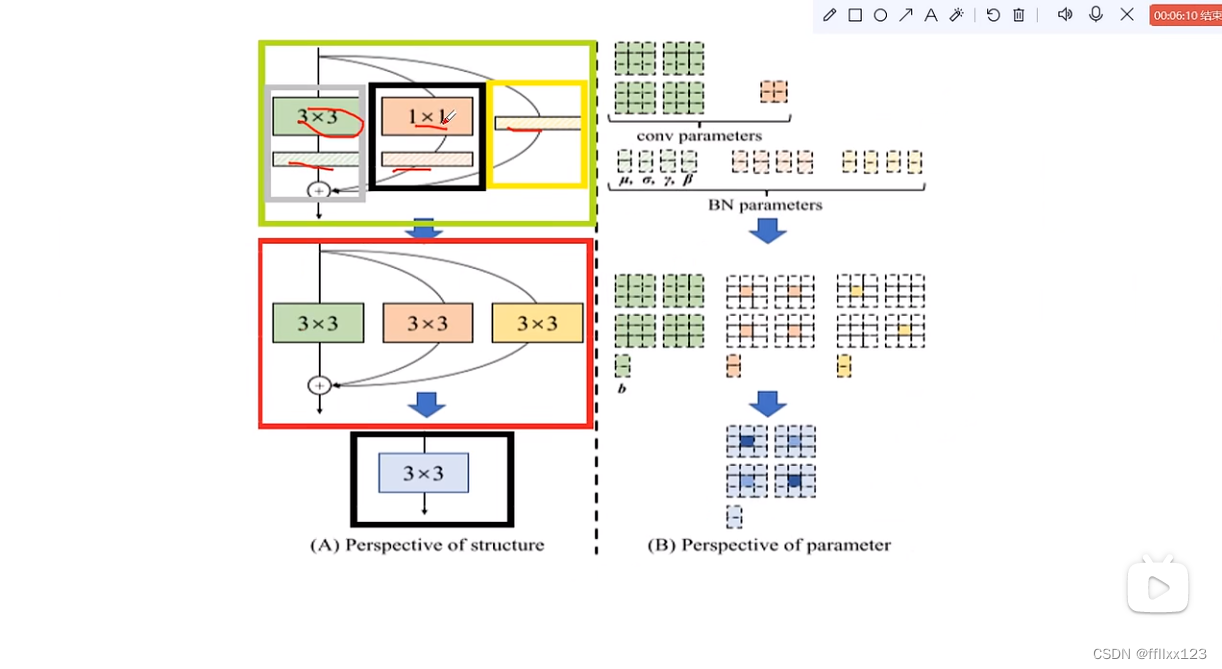
yolov7创新点

李航《统计学习方法》笔记之监督学习Supervised learning
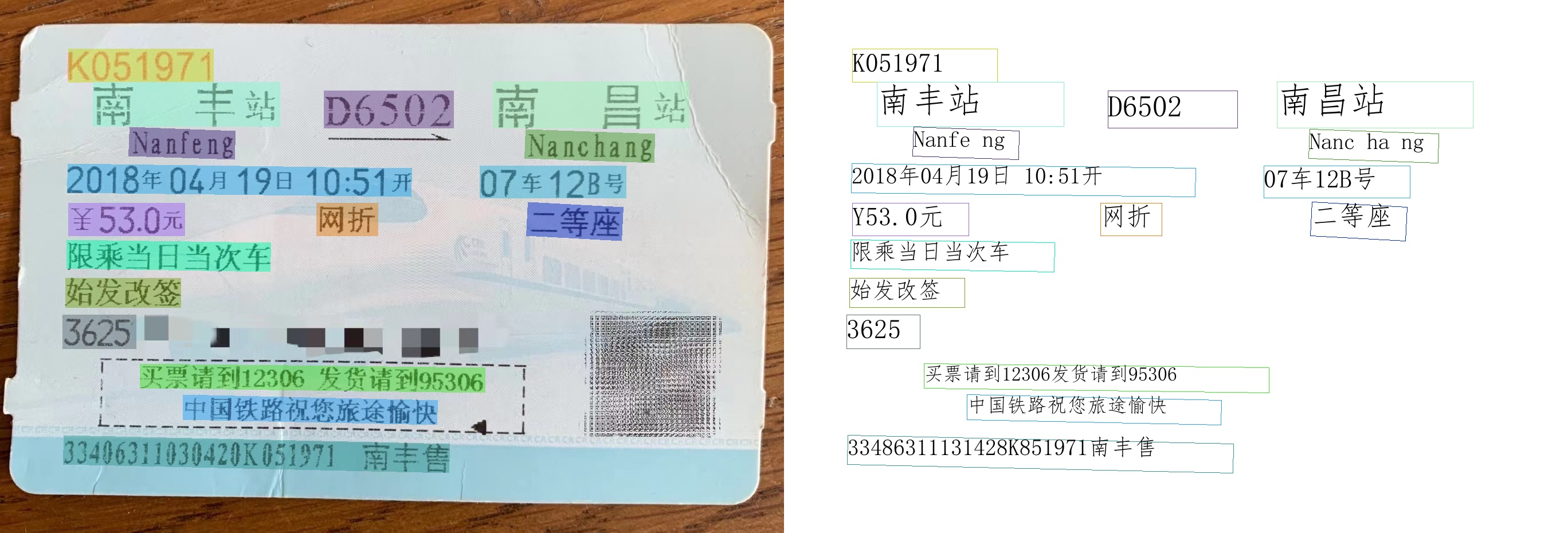
一款优秀的中文识别库——ocr
The realization of the list
随机推荐
You Only Hypothesize Once: 用旋转等变描述子估计变换做点云配准(已开源)
软件工程国考总结——选择题
Verilog的随机数系统任务----$random
使用较广泛的安全测试工具有哪些?
第十五章 多线程
R language ggplot2 visualization: use the ggbarplot function of the ggpubr package to visualize the stacked bar plot, the lab.pos parameter specifies the position of the numerical label of the bar cha
【云原生】快出数量级的性能是怎样炼成的?就提升了亿点点
神通数据库,批量插入数据的时候失败
typeinfo类型支持库学习
众城优选系统开发功能
Long battery life or safer?Seal and dark blue SL03 comparison shopping guide
iNFTnews | 看见元宇宙的两面,何谓全真互联网和价值互联网?
一款优秀的中文识别库——ocr
HikariCP数据库连接池,太快了!
The R language uses the ggtexttable function of the ggpubr package to visualize the table data (draw the table directly or add the table data to the image), set the theme parameter to customize the fi
Linux系统卸载,安装,升级,迁移clickHouse数据库
R语言ggplot2可视化:使用ggpubr包的ggtexttable函数可视化表格数据(直接绘制表格图或者在图像中添加表格数据)、使用tbody_add_border为表格中的表头添加外侧框线
8月份的.NET Conf 活动 专注于 .NET MAUI
HikariCP database connection pool, too fast!
李航《统计学习方法》笔记之朴素贝叶斯法