当前位置:网站首页>Data playback partner rviz+plotjuggler
Data playback partner rviz+plotjuggler
2022-07-02 06:05:00 【Hermit_ Rabbit】
Plotjuggler brief introduction
PlotJuggler Is a similar to rqt_plot Based on the Qt Data visualization tools for . but PlotJuggler Have more powerful and easy-to-use functions . You can import a text file and let it display the data in the text file . You can also import ros Of bag package , It can automatically parse bag Data in the package . And can be played back bag Packet data , And then use Rviz To display data .PlotJuggler There are many functions of , Here are just a few functions I often use . It should be enough to cope with the daily robot development and debugging work .
Plotjuggler Official website :
github Address :
https://github.com/facontidavide/PlotJuggler
install Plotjuggler
Pay attention to the , If it's coordination ROS1 To use , Recommended installation PlotJuggler 2.X.X, If it's coordination ROS2 To use , It is recommended to install PlotJuggler 3.X.X.
Based on binary AppImage Files installed
You can download it directly on the binary file download page .
Download Web page :https://github.com/facontidavide/PlotJuggler/releases
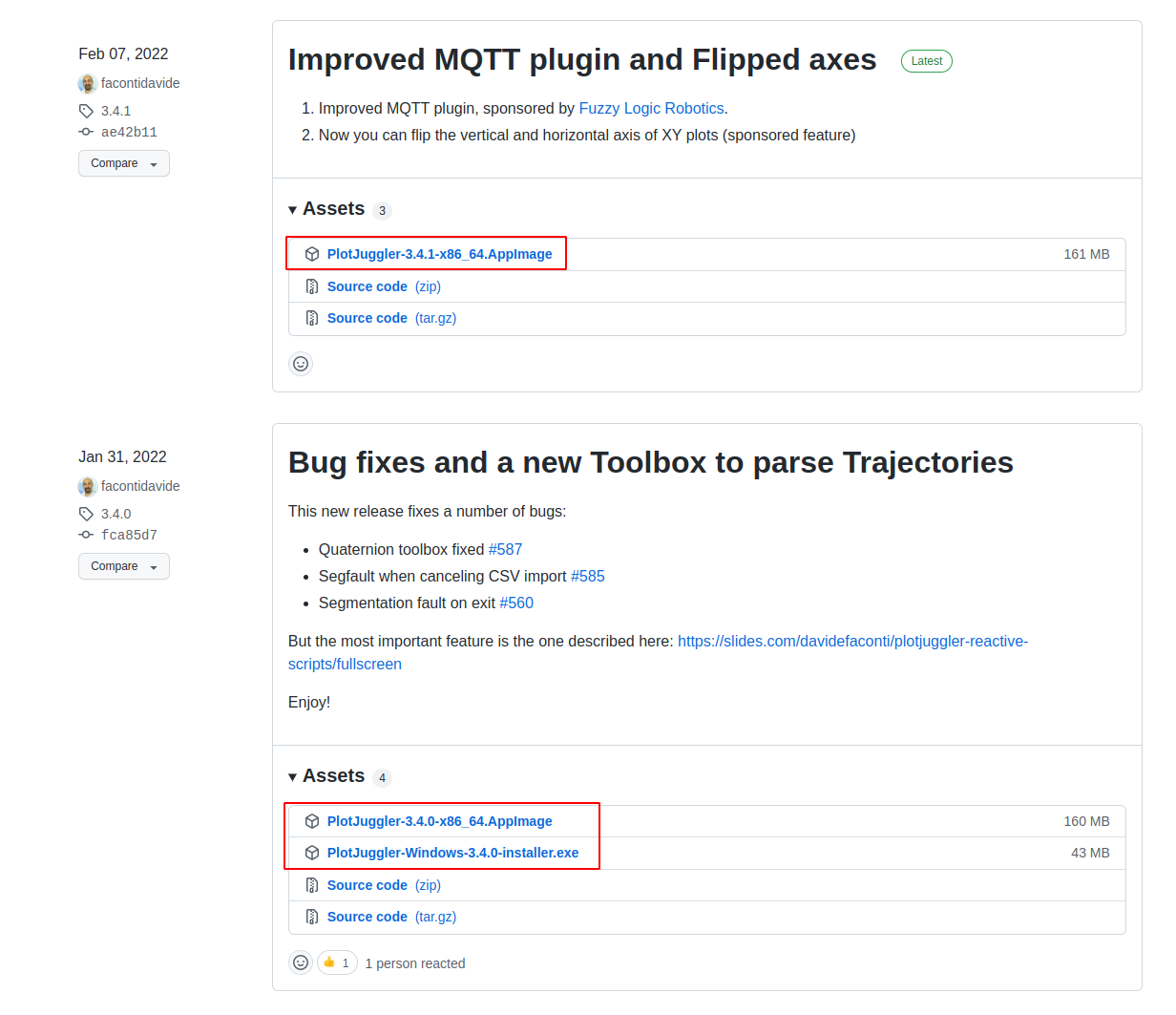
After downloading the file, you need to add execution permission to the file , Then double click to open and use .
ROS Binary installation ( recommend )
Use the following command :
sudo apt install ros-${ROS_DISTRO}-plotjuggler-ros
function Plotjuggler
about ROS1
rosrun plotjuggler plotjuggler
about ROS2
ros2 run plotjuggler plotjuggler
You can also use this command when upgrading a new version
sudo apt-get update
sudo apt install ros-${ROS_DISTRO}-plotjuggler-ros
Source code installation
In this way , You may be right Plotjuggler The code of . There are two cases of source code compilation , And ROS Irrelevant source code compilation and Need and ROS Joint use of source code compilation .
If you pull github The code is slow , Try to use github Download acceleration tools https://ghproxy.com/ .
- And ROS Irrelevant source code compilation
Cloning of warehouse
git clone https://github.com/facontidavide/PlotJuggler.git
Install pre compile dependencies
sudo apt -y install qtbase5-dev libqt5svg5-dev libqt5websockets5-dev libqt5opengl5-dev libqt5x11extras5-dev libprotoc-dev
compiling
mkdir build; cd build
cmake ..
make
sudo make install
Be careful : Compiling in this way is not ROS Related plug-ins .
- Need and ROS Joint use of source code compilation
about ROS1
- Create a workspace and pull the code
mkdir -p ~/ws_plotjuggler/src
cd ~/ws_plotjuggler/src
git clone https://ghproxy.com/https://github.com/PlotJuggler/plotjuggler_msgs.git
git clone https://ghproxy.com/https://github.com/facontidavide/PlotJuggler.git
git clone https://ghproxy.com/https://github.com/PlotJuggler/plotjuggler-ros-plugins.git
- Resolve dependencies and compile
cd ~/ws_plotjuggler
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
catkin_make
- start-up
Plotjuggler
source devel/setup.bash
roslaunch plotjuggler_ros plotjuggler.launch
about ROS2 Galactic
- Create a workspace and pull the code
mkdir -p ~/ws_plotjuggler/src
cd ~/ws_plotjuggler/src
git clone https://ghproxy.com/https://github.com/PlotJuggler/plotjuggler_msgs.git -b ros2
git clone https://ghproxy.com/https://github.com/facontidavide/PlotJuggler.git
git clone https://ghproxy.com/https://github.com/PlotJuggler/plotjuggler-ros-plugins.git -b galactic
- Resolve dependencies and compile
cd ~/ws_plotjuggler
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
colcon build
- start-up
Plotjuggler
source install/setup.bash
ros2 run plotjuggler plotjuggler
use Plotjuggler Show robot path
Save the robot trajectory as CSV file
Use the following example code to store the position of the robot . Other data can be stored in a similar way .
#include <fstream>
#include <ios>
#include <iostream>
#include <string>
#include <vector>
struct Pose
{
double x;
double y;
}
void saveCvsFile(std::string file_name, std::vector<Pose> path)
{
std::ofstream outfile;
outfile.open(file_name.c_str(), std::ios::trunc);
outfile << "x"
<< ","
<< "y"
<< ","
<< "yaw"
<< ","
<< "num" << std::endl;
int num_count = 0;
for (int i = 0; i < path->size(); ++i)
{
outfile << path->at(i).x << "," << path->at(i).y << ","
<< path->at(i).yaw << "," << num_count << std::endl;
num_count++;
}
outfile.close();
}
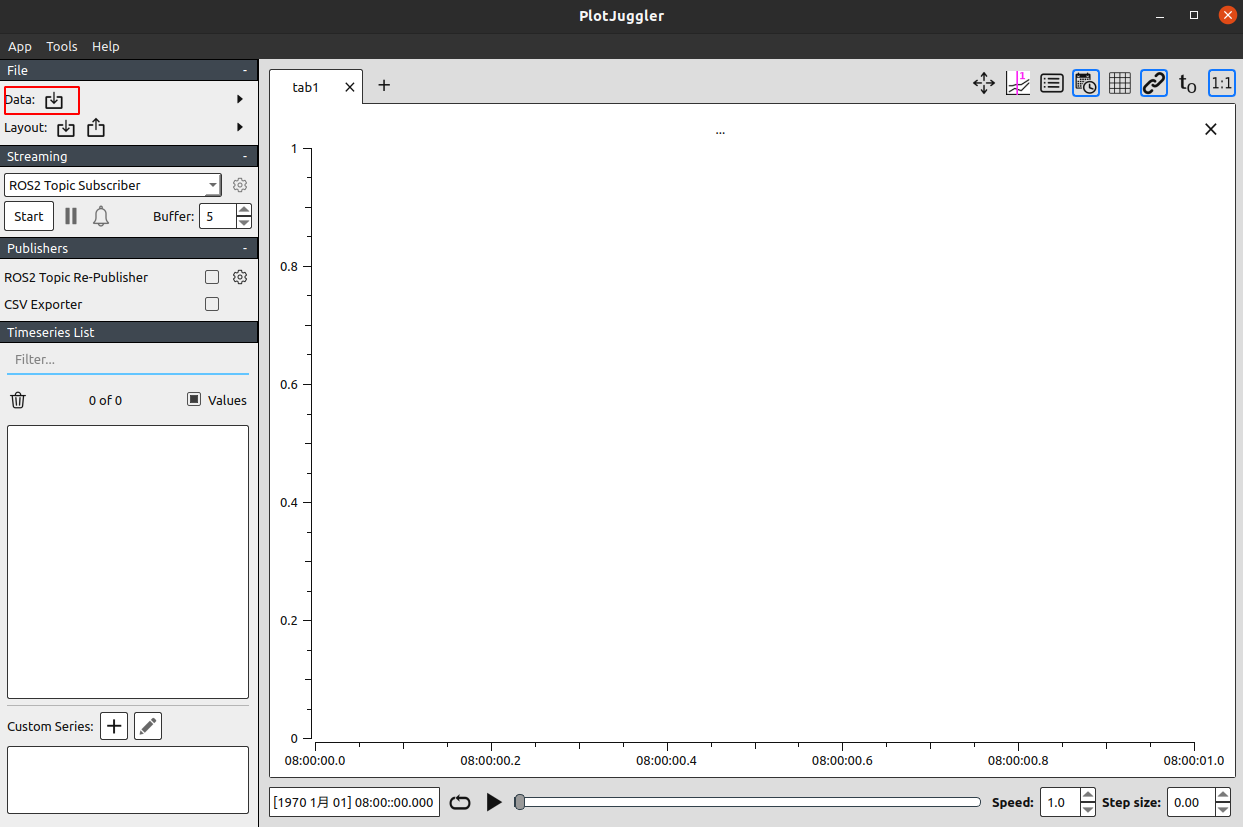
Plotjuggler Show CSV File path
open Plotjuggler, Choose Data load CSV file .
choice num As x Axis
Show ROS bag Data in
Recording bag The order of
ros2 bag record -o bagname Topic name
Example :
ros2 bag record -o turtlebot /turtle1/cmd_vel /turtle1/pose
Plotguggler load ROS2 bag
Here to load ROS2 Records of the bag For example . about ROS1 bag, The operation process is similar .
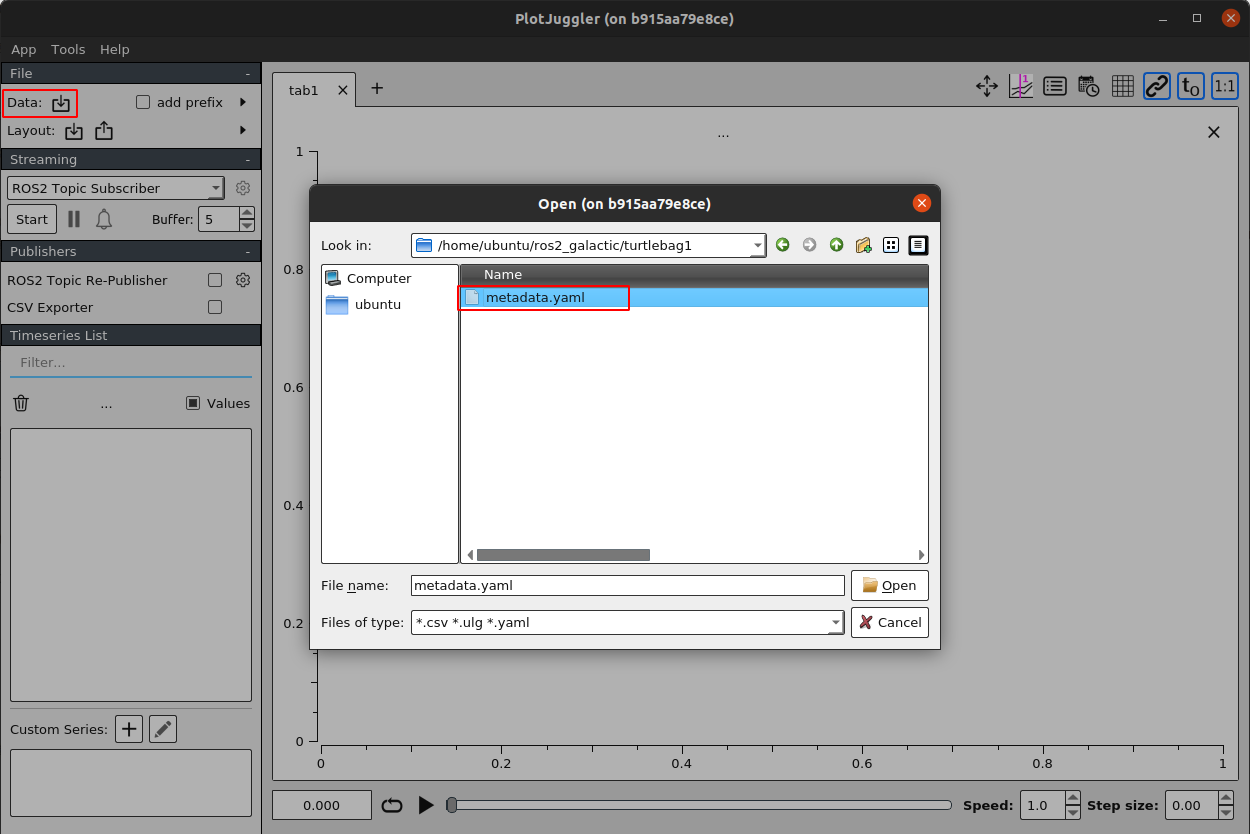
ros bag The data in is recorded in chronological order , So in Plotguggler You can drag the progress bar to view the data content at different time points . This function is too convenient for debugging .
subscribe ROS topic of conversation
Click below to start Button to start subscribing to topic data , Click on stop End topic subscription . Then you can see the recorded data at the bottom left .

Plotguggler The playback ROS2 bag,Rviz Display the data
At present, this function is in ROS2 There are still problems in the environment .Plotguggler Of github Relevant have been opened in Issue, But the author doesn't seem to revise it completely . There is still the problem of collapse .Plotguggler 2.x.x The version of is in ROS1 It can be used normally in the environment . Drag the progress bar , The recorded topic data can be played at any rhythm .
Issue website :
边栏推荐
猜你喜欢



随机推荐
Keepalived installation, use and quick start
数据库学习总结5
Vscode paste image plugin saves image path settings
深度学习分类网络--VGGNet
CNN visualization technology -- detailed explanation of cam & grad cam and concise implementation of pytorch
ROS2----LifecycleNode生命周期节点总结
数据回放伴侣Rviz+plotjuggler
Brain and cognitive neuroscience matlab psychoolbox cognitive science experimental design - experimental design 4
经典文献阅读之--Deformable DETR
借力 Google Cloud 基础设施和着陆区,构建企业级云原生卓越运营能力
Go 学习笔记整合
PHP development and testing WebService (soap) -win
深度学习分类网络 -- AlexNet
从设计交付到开发,轻松畅快高效率!
复杂 json数据 js前台解析 详细步骤《案例:一》
[C language] simple implementation of mine sweeping game
Stc8h8k Series Assembly and c51 Real combat - NIXIE TUBE displays ADC, Key Series port reply Key number and ADC value
The official zero foundation introduction jetpack compose Chinese course is coming!
Flutter 混合开发: 开发一个简单的快速启动框架 | 开发者说·DTalk
php父类(parent)