当前位置:网站首页>ROS2——初识ROS2(一)
ROS2——初识ROS2(一)
2022-07-05 06:35:00 【我与nano】
ROS2操作系统
前言
在学校的时候学习了ROS1,但是随着ROS2的慢慢普及,ROS1的1缺点便显现了出来,趁着暑假时间,来学习一下ROS2。
一、智能机器人时代
机器人的发展横跨七八十年,经历了三个重要时期。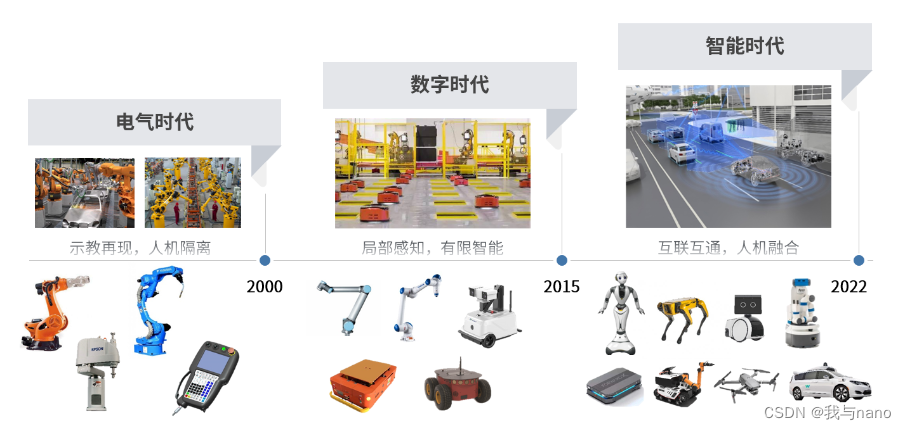
2000年前,机器人主要应用于工业生产,俗称工业机器人,由示教器操控,帮助工厂释放劳动力,此时的机器人并没有太多智能而言,完全按照人类的命令执行动作,更加关注电气层面的驱动器、伺服电机、减速机、控制器等设备,这是机器人的电气时代。
2000年后,计算机和视觉技术逐渐应用,机器人的类型不断丰富,出现了AGV、视觉检测等应用,此时的机器人传感器更加丰富,但是依然缺少自主思考的过程,智能化有限,只能感知局部环境,这是机器人的数字时代,不过这也是机器人大时代的前夜。
2015年之后,随着人工智能技术的快速发展,机器人成为了AI技术的最佳载体,家庭服务机器人、送餐机器人、四足仿生机器狗、自动驾驶汽车等应用呈井喷状爆发,智能机器人时代正式拉开序幕。
二、ROS的诞生
智能时代,机器人正在向全场景的高度智能化方向进化,这对机器人开发提出了巨大挑战,机器人操作系统ROS应用而生。
对于越来越复杂的智能机器人系统,已经不是一个人或者一个团队可以独立完成的,如何高效开发机器人,是技术层面上非常重要的一个问题,针对这个问题,一群斯坦福大学的有志青年尝试给出一个答案,那就是机器人操作系统。
三、ROS的发展
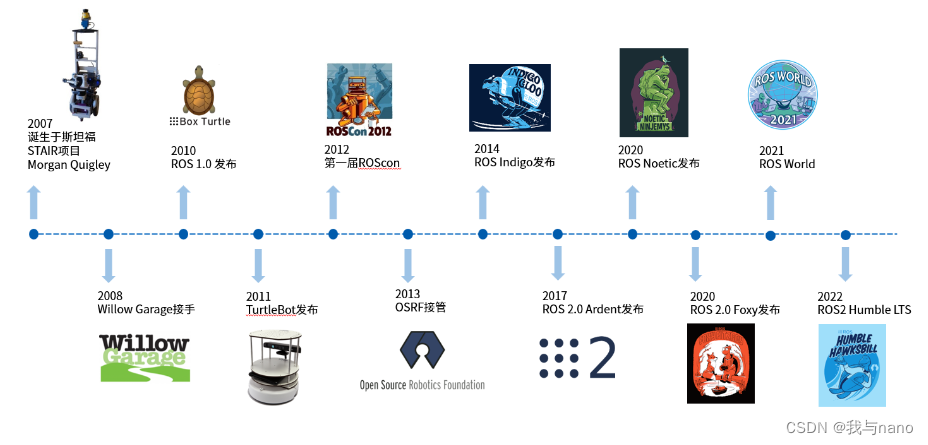
回到时间轴的起点,ROS的创始团队原本只想做一款个人服务机器人,万万没想到,ROS被越来越多机器人使用,受限于当初设计的局限性,ROS的问题也逐渐暴露。为了能够真正设计一款适用于所有机器人的操作系统,ROS2在2017年底正式发布,历经多年迭代,我们终于在2022年5月底,迎来了ROS2第一个长期支持版——ROS2 Humble,ROS2已经成熟,我们也进入了一个全新的ROS2时代。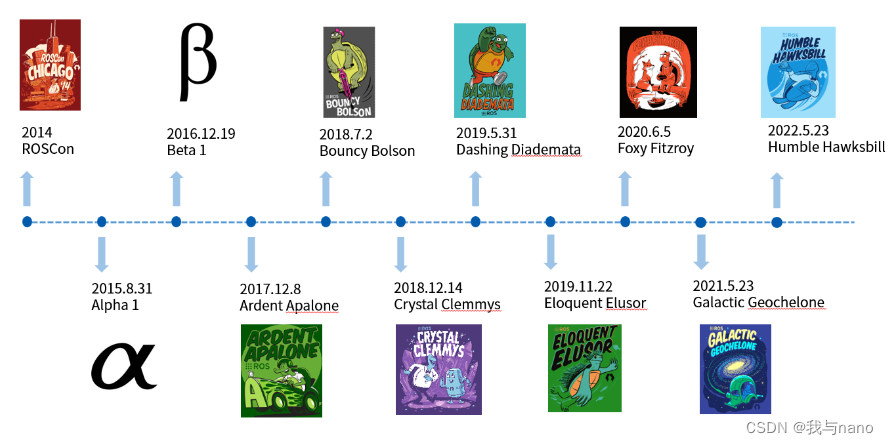
四、ROS的特点
ROS怀揣“提高机器人软件复用率”的目标,促使社区快速发展和繁荣,时至今日,ROS已经广泛用于各种机器人的开发,无论是机械臂、移动机器人、水下机器人,还是人形机器人、复合机器人,统统都可以看到ROS的身影,ROS已经成为机器人领域的普遍标准。
提高机器人软件复用率,这个目标简单来讲就是不要重新造轮子。
五、ROS的社区
社区是ROS快速发展的核心动力,什么是社区呢?其实就是ROS相关资源的整合方式,比如wiki说明、问答网站、应用源码、论坛讨论等都算是社区中的元素。
ROS全球社区有几个重要网站:
answers.ros.org,这是一个ROS问答网站,大家可以在上边提出任何关于ROS的问题,全球很多开发者都很乐意回答我们的问题;
wiki.ros.org,这是ROS的维基百科,记录了ROS教程和各种功能包的使用;
discourse.ros.org,这是ROS论坛,关于ROS开发的新鲜事都可以在这里发表和查看,比如ROS的活动、新功能包的发布等等。
index.ros.org,是ROS各种资源的一个索引网站;
packages.ros.org,是ROS功能包存储的数据库。
总结
跟着古月学完了ROS1,每一篇博客都是为了记录自己的学习生活,想深入了解的可以去b站看古月的视频讲解。
怕什么真理无穷,进一寸有一寸的欢喜。
边栏推荐
- 将webApp或者H5页面打包成App
- Time is fast, please do more meaningful things
- Game theory acwing 893 Set Nim game
- Interval problem acwing 906 Interval grouping
- Cookie、Session、JWT、token四者间的区别与联系
- Cloud native related technology learning
- Marvell 88e1515 PHY loopback mode test
- Speedtree01 generator properties
- Game theory acwing 891 Nim games
- PHY驱动调试之 --- MDIO/MDC接口22号和45号条款(一)
猜你喜欢
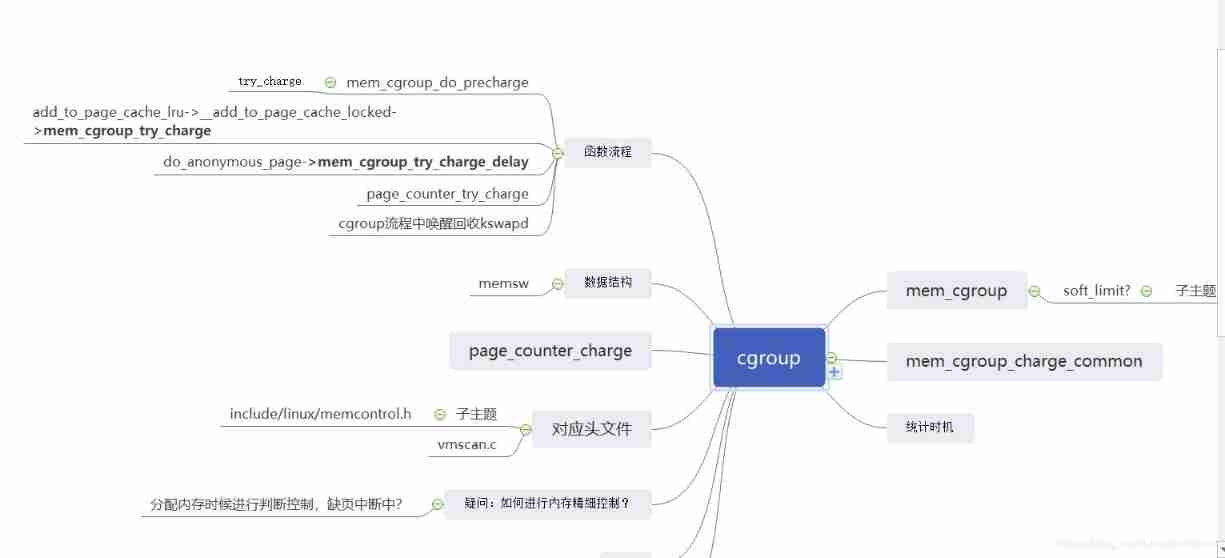
cgroup_ memcg
![[MySQL 8.0 does not support capitalization of table names - corresponding scheme]](/img/ea/a1e0722c43f56aff3e79f95c99ba8a.png)
[MySQL 8.0 does not support capitalization of table names - corresponding scheme]

5. Oracle TABLESPACE
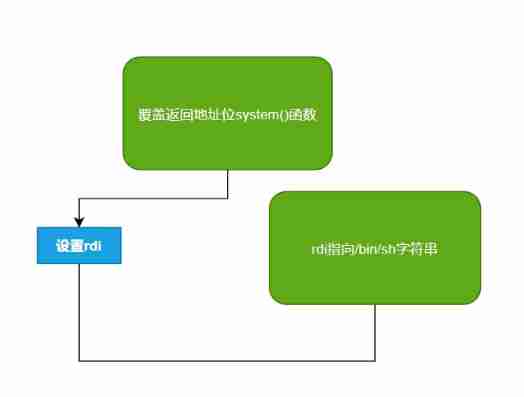
Ret2xx---- common CTF template proposition in PWN
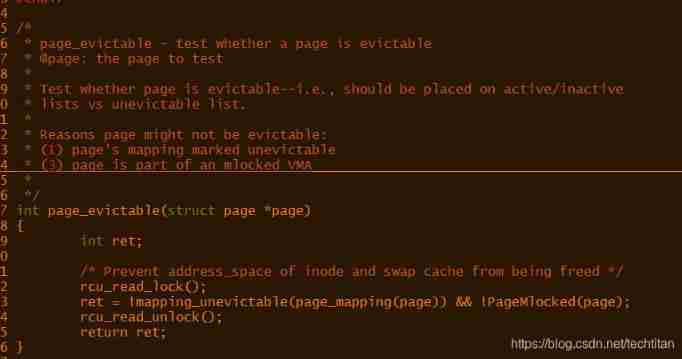
Page type
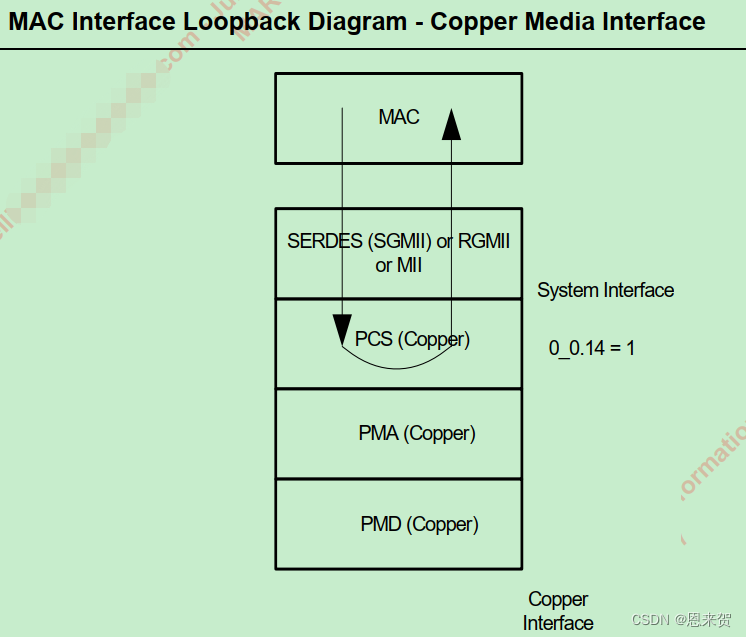
Marvell 88e1515 PHY loopback mode test

Redis-01.初识Redis
Utf8 encoding

namespace

Rehabilitation type force deduction brush question notes D1
随机推荐
Find the combination number acwing 888 Find the combination number IV
Find the combination number acwing 887 Find combination number III
Redis-01. First meet redis
Game theory acwing 893 Set Nim game
5. Oracle TABLESPACE
Find the combination number acwing 889 01 sequence meeting conditions
‘mongoexport‘ 不是内部或外部命令,也不是可运行的程序 或批处理文件。
cgroup_ memcg
Huawei bracelet, how to add medicine reminder?
About vscode, "code unreachable" will be displayed when calling sendline series functions with pwntools“
Database mysql all
How to answer when you encounter a jet on CSDN?
Use the Paping tool to detect TCP port connectivity
Game theory acwing 892 Steps Nim game
vsCode创建自己的代码模板
The “mode“ argument must be integer. Received an instance of Object
Xavier CPU & GPU 高负载功耗测试
ADG5412FBRUZ-RL7应用 双电源模拟开关和多路复用器IC
Mutual transformation between two-dimensional array and sparse array (sparse matrix)
Xavier CPU & GPU high load power consumption test