当前位置:网站首页>YOLOX中的SimOTA
YOLOX中的SimOTA
2022-07-31 05:16:00 【Cassiel_cx】
1、确定正样本候选区域(调用get_in_boxes_info确定候选区域)
将gt里面的点或者在center_radius范围内的点作为候选正样本点
def get_in_boxes_info(
self,
gt_bboxes_per_image,
expanded_strides,
x_shifts,
y_shifts,
total_num_anchors,
num_gt,
):
expanded_strides_per_image = expanded_strides[0]
x_shifts_per_image = x_shifts[0] * expanded_strides_per_image
y_shifts_per_image = y_shifts[0] * expanded_strides_per_image
x_centers_per_image = (
(x_shifts_per_image + 0.5 * expanded_strides_per_image)
.unsqueeze(0)
.repeat(num_gt, 1)
) # [n_anchor] -> [n_gt, n_anchor]
y_centers_per_image = (
(y_shifts_per_image + 0.5 * expanded_strides_per_image)
.unsqueeze(0)
.repeat(num_gt, 1)
)
gt_bboxes_per_image_l = (
(gt_bboxes_per_image[:, 0] - 0.5 * gt_bboxes_per_image[:, 2])
.unsqueeze(1)
.repeat(1, total_num_anchors)
)
gt_bboxes_per_image_r = (
(gt_bboxes_per_image[:, 0] + 0.5 * gt_bboxes_per_image[:, 2])
.unsqueeze(1)
.repeat(1, total_num_anchors)
)
gt_bboxes_per_image_t = (
(gt_bboxes_per_image[:, 1] - 0.5 * gt_bboxes_per_image[:, 3])
.unsqueeze(1)
.repeat(1, total_num_anchors)
)
gt_bboxes_per_image_b = (
(gt_bboxes_per_image[:, 1] + 0.5 * gt_bboxes_per_image[:, 3])
.unsqueeze(1)
.repeat(1, total_num_anchors)
)
b_l = x_centers_per_image - gt_bboxes_per_image_l
b_r = gt_bboxes_per_image_r - x_centers_per_image
b_t = y_centers_per_image - gt_bboxes_per_image_t
b_b = gt_bboxes_per_image_b - y_centers_per_image
bbox_deltas = torch.stack([b_l, b_t, b_r, b_b], 2)
is_in_boxes = bbox_deltas.min(dim=-1).values > 0.0
is_in_boxes_all = is_in_boxes.sum(dim=0) > 0
# in fixed center
center_radius = 2.5
gt_bboxes_per_image_l = (gt_bboxes_per_image[:, 0]).unsqueeze(1).repeat(
1, total_num_anchors
) - center_radius * expanded_strides_per_image.unsqueeze(0)
gt_bboxes_per_image_r = (gt_bboxes_per_image[:, 0]).unsqueeze(1).repeat(
1, total_num_anchors
) + center_radius * expanded_strides_per_image.unsqueeze(0)
gt_bboxes_per_image_t = (gt_bboxes_per_image[:, 1]).unsqueeze(1).repeat(
1, total_num_anchors
) - center_radius * expanded_strides_per_image.unsqueeze(0)
gt_bboxes_per_image_b = (gt_bboxes_per_image[:, 1]).unsqueeze(1).repeat(
1, total_num_anchors
) + center_radius * expanded_strides_per_image.unsqueeze(0)
c_l = x_centers_per_image - gt_bboxes_per_image_l
c_r = gt_bboxes_per_image_r - x_centers_per_image
c_t = y_centers_per_image - gt_bboxes_per_image_t
c_b = gt_bboxes_per_image_b - y_centers_per_image
center_deltas = torch.stack([c_l, c_t, c_r, c_b], 2)
is_in_centers = center_deltas.min(dim=-1).values > 0.0
is_in_centers_all = is_in_centers.sum(dim=0) > 0
# in boxes and in centers
is_in_boxes_anchor = is_in_boxes_all | is_in_centers_all
is_in_boxes_and_center = (
is_in_boxes[:, is_in_boxes_anchor] & is_in_centers[:, is_in_boxes_anchor]
)
return is_in_boxes_anchor, is_in_boxes_and_center2、计算候选正样本点与gt间的iou
fg_mask, is_in_boxes_and_center = self.get_in_boxes_info(
gt_bboxes_per_image,
expanded_strides,
x_shifts,
y_shifts,
total_num_anchors,
num_gt,
)
bboxes_preds_per_image = bboxes_preds_per_image[fg_mask]
cls_preds_ = cls_preds[batch_idx][fg_mask]
emb_preds_ = emb_preds[batch_idx][fg_mask]
obj_preds_ = obj_preds[batch_idx][fg_mask]
num_in_boxes_anchor = bboxes_preds_per_image.shape[0]
if mode == "cpu":
gt_bboxes_per_image = gt_bboxes_per_image.cpu()
bboxes_preds_per_image = bboxes_preds_per_image.cpu()
pair_wise_ious = bboxes_iou(gt_bboxes_per_image, bboxes_preds_per_image, False)3、在候选正样本点间计算cost
gt_cls_per_image = (
F.one_hot(gt_classes.to(torch.int64), self.num_classes)
.float()
.unsqueeze(1)
.repeat(1, num_in_boxes_anchor, 1)
)
pair_wise_ious_loss = -torch.log(pair_wise_ious + 1e-8)
if mode == "cpu":
cls_preds_, emb_preds_, obj_preds_ = cls_preds_.cpu(), emb_preds_.cpu(), obj_preds_.cpu()
cls_preds_ = (
cls_preds_.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
* obj_preds_.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
)
pair_wise_cls_loss = F.binary_cross_entropy(
cls_preds_.sqrt_(), gt_cls_per_image, reduction="none"
).sum(-1)
del cls_preds_
cost = (
pair_wise_cls_loss
+ 3.0 * pair_wise_ious_loss
+ 100000.0 * (~is_in_boxes_and_center)
)
(
num_fg,
gt_matched_classes,
pred_ious_this_matching,
matched_gt_inds,
) = self.dynamic_k_matching(cost, pair_wise_ious, gt_classes, num_gt, fg_mask)
del pair_wise_cls_loss, cost, pair_wise_ious, pair_wise_ious_loss4、求出预测框与每个gt之间前n_candidate_k个最大iou值并求和取整,作为dynamic_k。从候选正样本点中选取dynamic_k个cost最小的点作为最终的正样本点
def dynamic_k_matching(self, cost, pair_wise_ious, gt_classes, num_gt, fg_mask):
# Dynamic K
# ---------------------------------------------------------------
matching_matrix = torch.zeros_like(cost)
ious_in_boxes_matrix = pair_wise_ious
n_candidate_k = min(10, ious_in_boxes_matrix.size(1))
topk_ious, _ = torch.topk(ious_in_boxes_matrix, n_candidate_k, dim=1)
dynamic_ks = torch.clamp(topk_ious.sum(1).int(), min=1)
for gt_idx in range(num_gt):
_, pos_idx = torch.topk(
cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
)
matching_matrix[gt_idx][pos_idx] = 1.0
del topk_ious, dynamic_ks, pos_idx
anchor_matching_gt = matching_matrix.sum(0)
if (anchor_matching_gt > 1).sum() > 0:
_, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
matching_matrix[:, anchor_matching_gt > 1] *= 0.0
matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
fg_mask_inboxes = matching_matrix.sum(0) > 0.0
num_fg = fg_mask_inboxes.sum().item()
fg_mask[fg_mask.clone()] = fg_mask_inboxes
matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
gt_matched_classes = gt_classes[matched_gt_inds]
pred_ious_this_matching = (matching_matrix * pair_wise_ious).sum(0)[
fg_mask_inboxes
]
return num_fg, gt_matched_classes, pred_ious_this_matching, matched_gt_inds
5、使用步骤4求出的正负样本来计算分类、回归损失
边栏推荐
猜你喜欢

flutter 混合开发 module 依赖

Tencent Cloud GPU Desktop Server Driver Installation
微信小程序源码获取与反编译方式
Global scope and function scope in js

What is the difference between NFT and digital collection?

qt:cannot open C:\Users\某某某\AppData\Local\Temp\main.obj.15576.16.jom for write
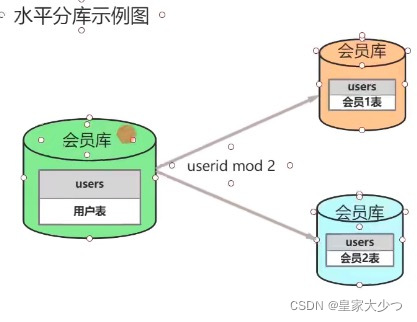
How MySQL - depots table?A look at will understand
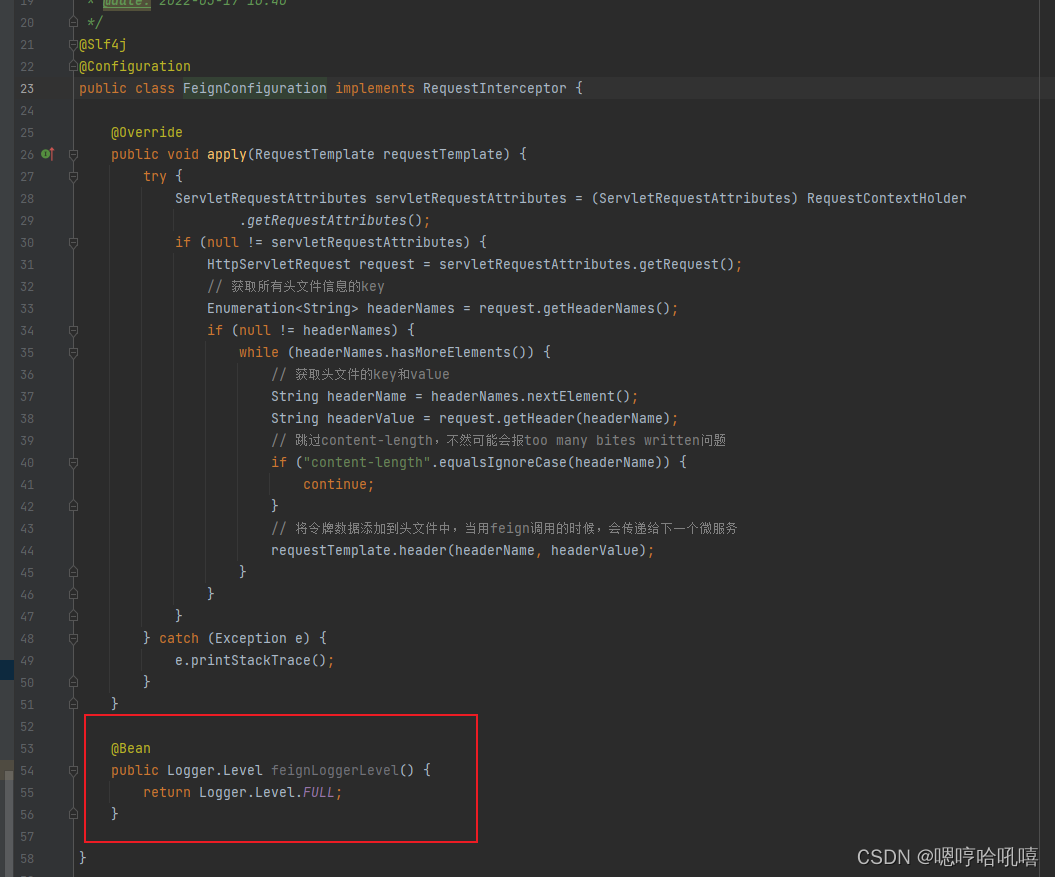
The feign call fails, JSON parse error Illegal character ((CTRL-CHAR, code 31)) only regular white space (r

UiBot has an open Microsoft Edge browser and cannot perform the installation
Common JVM interview questions and answers
随机推荐
jenkins +miniprogram-ci upload WeChat applet with one click
VS通过ODBC连接MYSQL(二)
qt:cannot open C:\Users\XX\AppData\Local\Temp\main.obj.15576.16.jom for write
Nmap的下载与安装
VS通过ODBC连接MYSQL(一)
A simple bash to powershell case
Markdown 帮助文档
cocos2d-x-3.2 image graying effect
cocos2d-x-3.2 不能混合颜色修改
Flow control statement in js
VTK环境配置
安装Multisim出现 No software will be installed or removed解决方法
TransactionTemplate 事务编程式写法
Understanding of objects and functions in js
Tencent Cloud Lightweight Server deletes all firewall rules
js中的break与continue退出
flutter arr dependencies
SSH自动重连脚本
cocos2d-x 实现跨平台的目录遍历
Navicat从本地文件中导入sql文件