当前位置:网站首页>Wired network IP address of VMware shared host
Wired network IP address of VMware shared host
2022-07-07 13:58:00 【On the way_ continue】
When practicing and debugging the mechanical arm , You need to connect the teaching pendant of the manipulator with the network port of the notebook to communicate with the manipulator to do Development .
One 、 Set the laptop IP Address and manipulator IP The address is in the same network segment .
Robot arm teaching device Ip The address is 10. 210.51.10, The subnet mask is 255.0.0.0.( At the end of the teaching pendant IP Address can be customized )
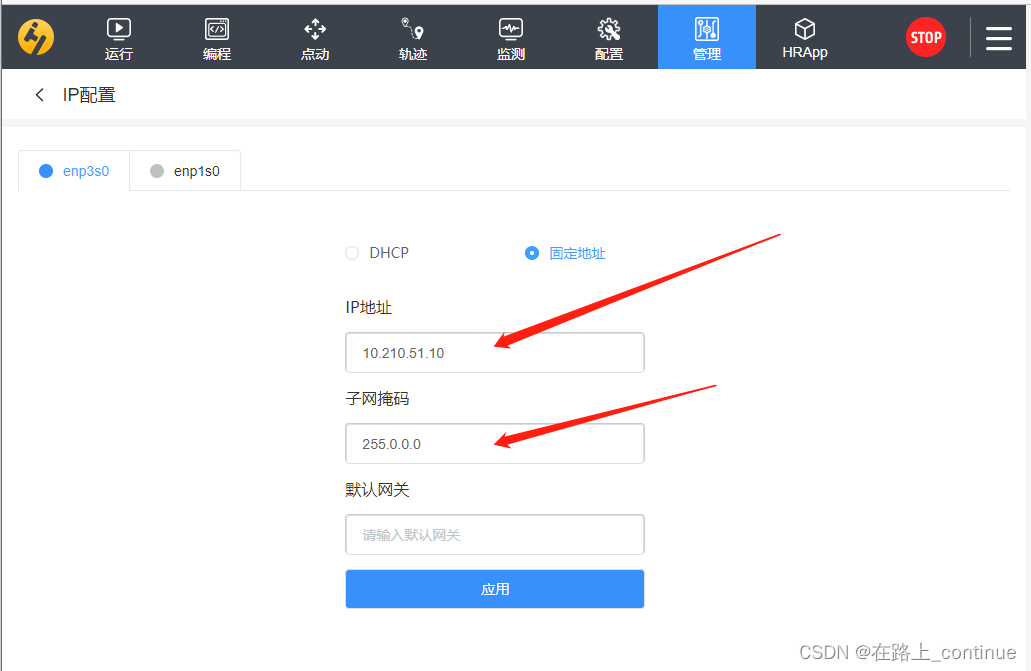
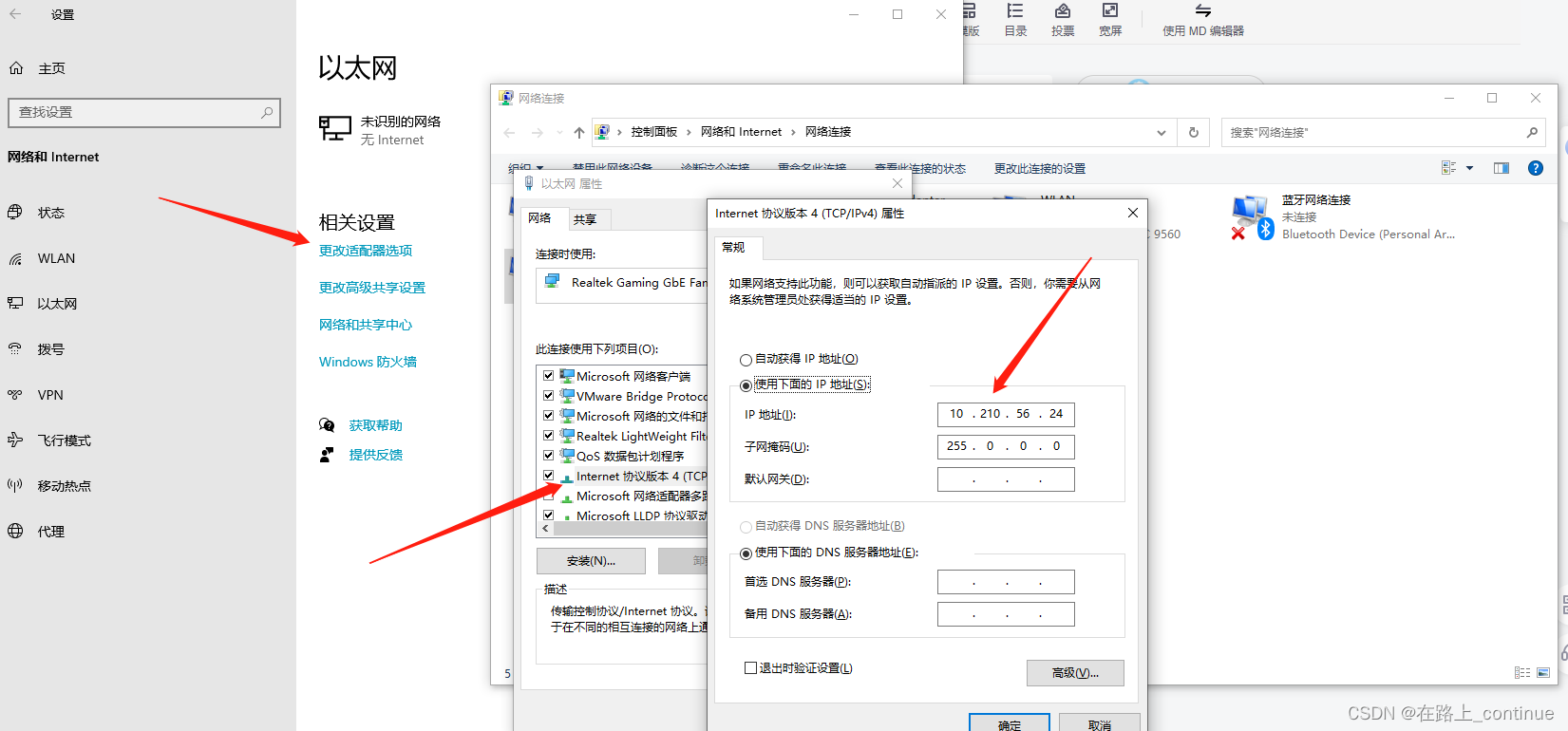
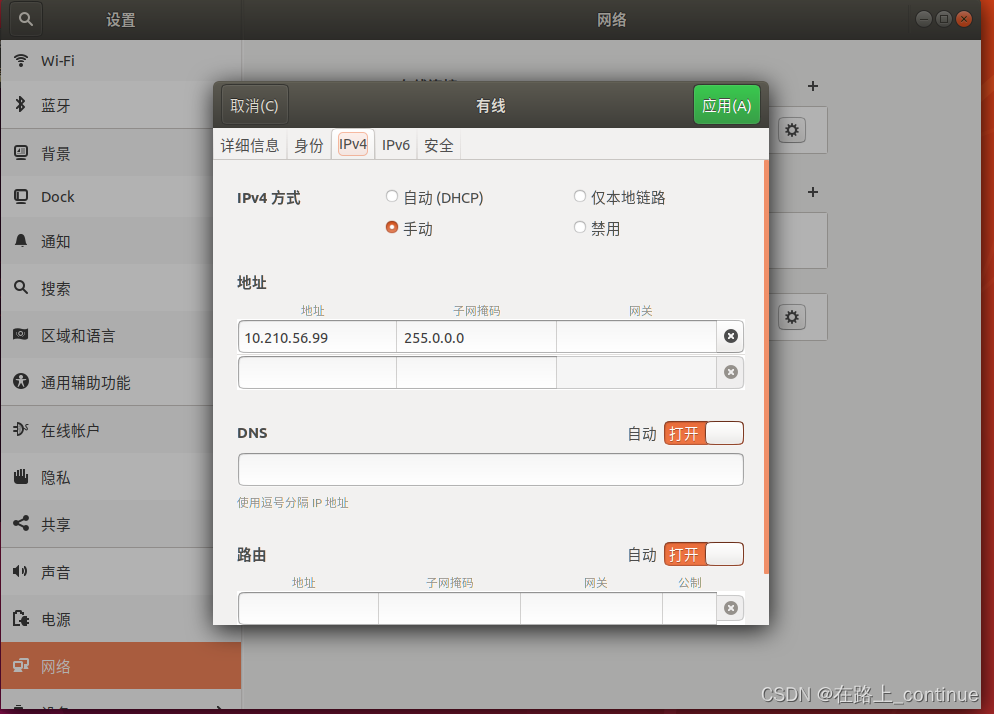
Then set the computer IP Address , Modify the interface Iipv4 Address , The specific operation process is as follows .
About IP Introduction of network segment , You can refer to the link : What is? A.B.C Class network How to distinguish and divide _qijitao The blog of -CSDN Blog _abc The Internet
Use here A This kind of network segment is because the default network segment of the manufacturer is C Class , But the test failed anyway , So change to A Class segment .
Two 、 Set up a network of virtual machines
It mainly modifies the network adapter tab of the virtual machine , The following figure is not modified :
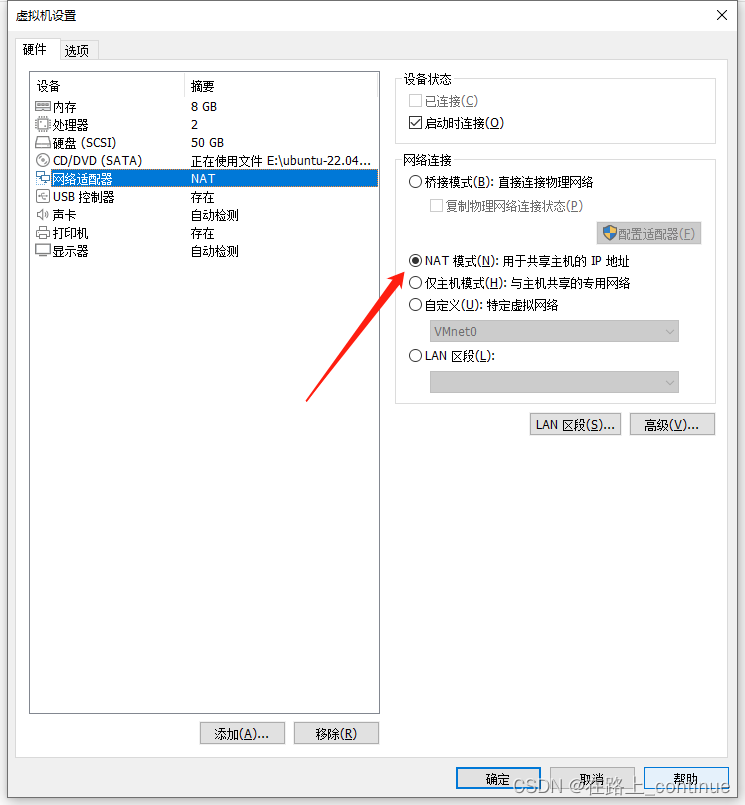
The settings above are the default settings for installing virtual , Under normal circumstances, you can surf the Internet normally , Now let's modify the network mode , The specific modification method is as follows :
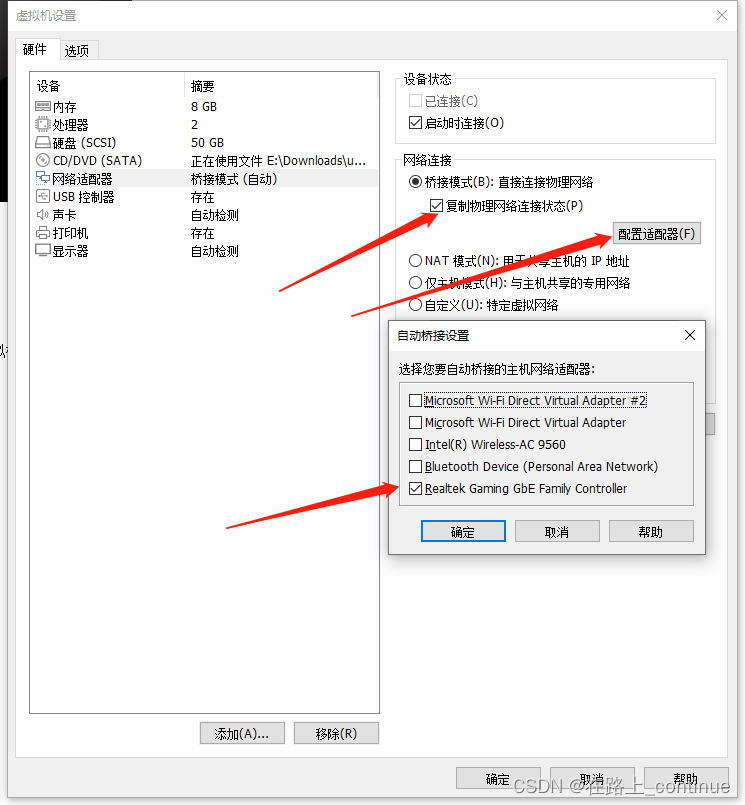
Personally test that the above modification method is effective .
Modify the network settings of the virtual machine , take IP Address acquisition is changed to manual acquisition .
The above steps to modify the network , After the modification is completed, it is best to restart the virtual machine before it takes effect .
3、 ... and 、 test
Used on the virtual end ping The tool tests whether the network from the manipulator teaching pendant is smooth :
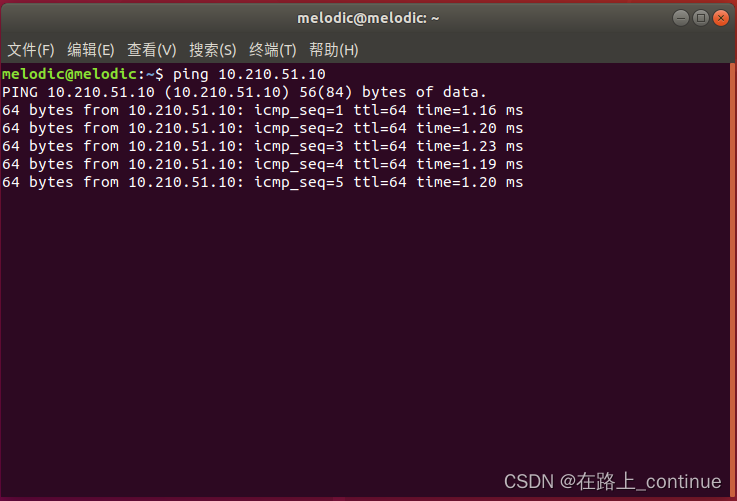
The test passed , In this way, the virtual machine can be used to compare the robot arm provided by the manufacturer SDK Developed or used ROS Development .
边栏推荐
- Laravel5 call to undefined function openssl cipher iv length() 报错 PHP7开启OpenSSL扩展失败
- 1. Deep copy 2. Call apply bind 3. For of in differences
- Beginner XML
- 使用day.js让时间 (显示为几分钟前 几小时前 几天前 几个月前 )
- Vmware 与主机之间传输文件
- 交付效率提升52倍,运营效率提升10倍,看《金融云原生技术实践案例汇编》(附下载)
- C语言数组相关问题深度理解
- Mathématiques avancées - - chapitre 8 différenciation des fonctions multivariables 1
- How to make join run faster?
- 属性关键字Aliases,Calculated,Cardinality,ClientName
猜你喜欢
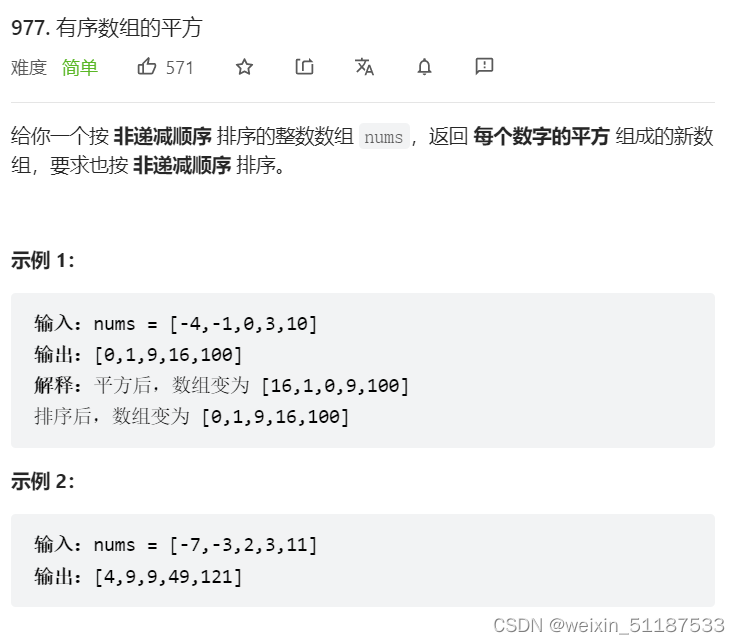
2022-7-6 Leetcode 977.有序数组的平方
XML文件的解析操作
2022-7-7 Leetcode 844. Compare strings with backspace
2022-7-7 Leetcode 34. Find the first and last positions of elements in a sorted array

MySQL error 28 and solution
![Introduction to database system - Chapter 1 introduction [conceptual model, hierarchical model and three-level mode (external mode, mode, internal mode)]](/img/35/5224252624cc76f42cbd0fd5c81d8c.png)
Introduction to database system - Chapter 1 introduction [conceptual model, hierarchical model and three-level mode (external mode, mode, internal mode)]
566. Reshaping the matrix

Getting started with cinnamon applet
数据库系统概论-第一章绪论【概念模型、层次模型和三级模式(外模式、模式、内模式)】
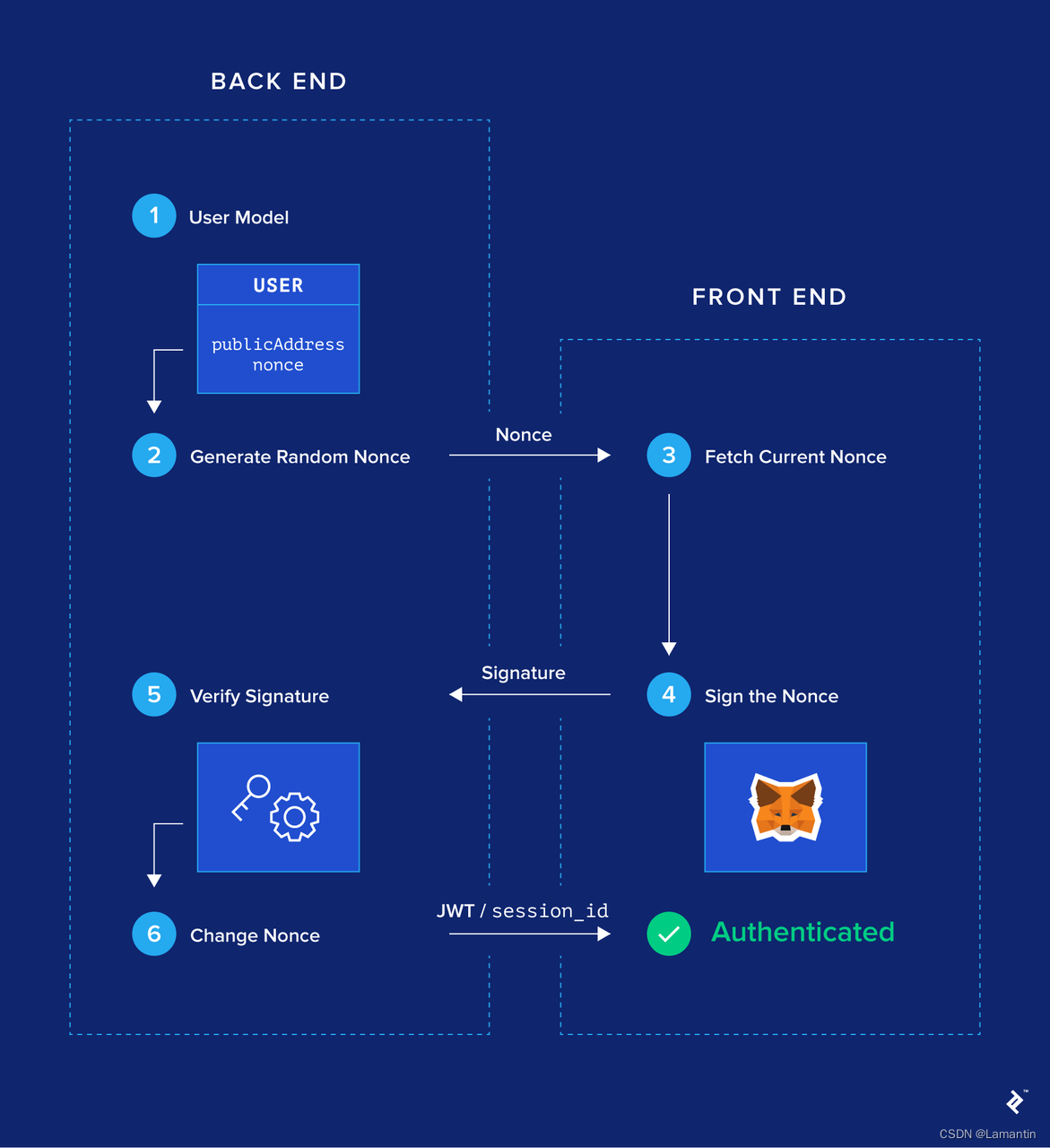
DID登陆-MetaMask
随机推荐
请问指南针股票软件可靠吗?交易股票安全吗?
The meaning of variables starting with underscores in PHP
Fast development board pinctrl and GPIO subsystem experiment for itop-imx6ull - modify the device tree file
DID登陆-MetaMask
C语言数组相关问题深度理解
Laravel5 call to undefined function OpenSSL cipher IV length() error php7 failed to open OpenSSL extension
. Net core about redis pipeline and transactions
干货|总结那些漏洞工具的联动使用
ROS机器人更换新雷达需要重新配置哪些参数
Lavarel之环境配置 .env
Indoor ROS robot navigation commissioning record (experience in selecting expansion radius)
566. Reshaping the matrix
requires php ~7.1 -> your PHP version (7.0.18) does not satisfy that requirement
Thread pool reject policy best practices
室内ROS机器人导航调试记录(膨胀半径的选取经验)
为租客提供帮助
Getting started with cinnamon applet
Redis只能做缓存?太out了!
【日常训练】648. 单词替换
Navicat run SQL file import data incomplete or import failed