当前位置:网站首页>STM32 and motor development (upper system)
STM32 and motor development (upper system)
2022-07-02 10:30:00 【Embedded - old fee】
【 Statement : copyright , Welcome to reprint , Do not use for commercial purposes . Contact mailbox :feixiaoxing @163.com】
The motor itself is generally developed with PID perhaps FOC Accomplished . however , As a system , stay stm32 Before , There is usually a host system , This host system usually runs linux System or windows System . If it is linux System , Generally, there are various soc; If it is windows System , It is commonly pc Computer. .
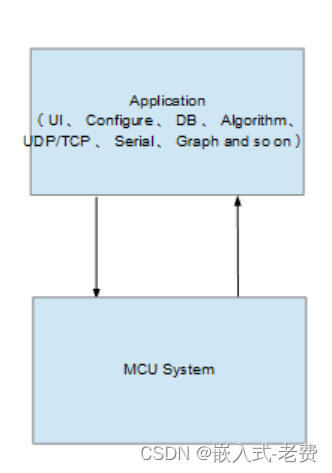
To illustrate how the motor control system interacts with the upper layer , We can take the writing machine as an explanation . The writer usually takes pc Treat as a host , After preprocessing the image , Generate control commands one by one . These orders , Send to... Through serial port stm32, After serial port analysis 、 interpolation 、 Speed planning 、x/y/z After control , The corresponding image can be printed by writing with a pen . Similar methods can also be used for carving 、3d Printing and other occasions .
With the above instructions , We can try to understand , What actions a host system needs to do ;
a) Scan image ;
b) Grayscale processing ;
c) Generate control instructions ;
d) Send these instructions to mcu;
e) Receive execution results , Feed progress back to the screen .
It says a writing machine . We can change the scene , Like robots . Suppose there is such a robot with three wheels , The front is the driving wheel , It can move forward 、 back off 、 Spin around , Behind it is the driven wheel , There is no control . If the design goal is to make this robot from A Go to B spot , So what should it do ? Generally speaking , It can be broken down into several steps ,
a) Using the search algorithm , Search for a road without obstacles ;
b) According to the requirements of minimum turning radius, this road shall be treated in sections , There is a minimum distance requirement ;
c) Then according to the speed limit conditions, the entry speed of each section is planned 、 Exit speed 、 Entrance angle 、 Exit angle ;
d) Add path information 、 Turning radius information 、 Speed information 、 Angle information 、 Send segmented information mcu;
e) Receive the execution result circularly , Pass the progress in real time log Print out .
Through the above two systems , We find that the upper system pays more attention to the overall layout of the algorithm . When the algorithm is finished , Give it all to mcu To execute . therefore , Control is mcu The strengths of , The algorithm is not . After all ,mcu The frequency and performance of are there , You can't expect mcu Do something beyond its ability .
The actual application range of motor is very wide , No matter in the field of consumption 、 Industry 、 Military industry , They play a huge role . Controlling the motor is only the first step , The most important thing is to use the upper system to generate control instructions , Send to motor , Let it work properly to meet our needs , This is the fundamental purpose of learning motor , You can't learn motors just to learn motors . Different scenarios , Control requirements are also different , For example, some require faster , Some requirements are more accurate , Some require lower costs , Each scenario has its own specific constraints , These can only be practiced and felt constantly in work .
边栏推荐
- AutoCAD - layer Linetype
- 快速做出原型
- Mock Server基本使用方法
- Deep understanding of redis cache avalanche / cache breakdown / cache penetration
- Basic usage of mock server
- Notes de base sur les plans illusoires d'IA (triés en 10 000 mots)
- Applet development summary
- Blender camera surround motion, animation rendering, video synthesis
- Pytest framework implements pre post
- [unity3d] cannot correctly obtain the attribute value of recttransform, resulting in calculation error
猜你喜欢
UE5——AI追逐(蓝图、行为树)

Notes de base sur les plans illusoires d'IA (triés en 10 000 mots)
![[ue5] blueprint making simple mine tutorial](/img/87/d0bec747a6b6276d63a315f88745ec.png)
[ue5] blueprint making simple mine tutorial
Applet development summary
Blender stone carving

sqoop创建job出现的一系列问题解决方法
Blender体积雾
![[jetbrain rider] an exception occurred in the construction project: the imported project](/img/4b/7847282735f3cc3f8f5c559a9c2493.png)
[jetbrain rider] an exception occurred in the construction project: the imported project "d:\visualstudio2017\ide\msbuild\15.0\bin\roslyn\microsoft.csh" was not found
Blender多鏡頭(多機比特)切換
allure--常用配置项
随机推荐
MPLS experiment
[pit avoidance guide] pit encountered by unity3d project when accessing Tencent bugly tool
Blender石头雕刻
SAP Spartacus express checkout design
两数之和,求目标值
Understand the composition of building energy-saving system
webUI自动化学习
MySQL -- time zone / connector / driver type
Aiphacode is not a substitute for programmers, but a tool for developers
【Unity3D】嵌套使用Layout Group制作拥有动态子物体高度的Scroll View
Project practice, redis cluster technology learning (IX)
Project practice, redis cluster technology learning (VIII)
Ue5 - AI pursuit (blueprint, behavior tree)
Blender体积雾
pytest框架实现前后置
[illusory] weapon slot: pick up weapons
Sum the two numbers to find the target value
【Visual Studio】每次打开一个Unity3D的脚本,都会自动重新打开一个新的VS2017
Unreal material editor foundation - how to connect a basic material
Blender ocean production