当前位置:网站首页>Quick completion guide of manipulator (10): accessible workspace
Quick completion guide of manipulator (10): accessible workspace
2022-07-07 04:00:00 【Lie on me】
Directory :
Quick completion guide of mechanical arm ( zero ): Main contents and analysis methods of the guide
Quick completion guide of mechanical arm ( One ): The development of manipulator
Quick completion guide of mechanical arm ( Two ): Application of mechanical arm
Quick completion guide of mechanical arm ( 3、 ... and ): Mechanical structure of mechanical arm
Quick completion guide of mechanical arm ( Four ): Reducer of key components of mechanical arm
Quick completion guide of mechanical arm ( 5、 ... and ): End actuators
Quick completion guide of mechanical arm ( 6、 ... and ): Stepper motor driver
Quick completion guide of mechanical arm ( 7、 ... and ): Description method of robot arm posture
Quick completion guide of mechanical arm ( 8、 ... and ): Kinematic modeling ( standard DH Law )
Quick completion guide of mechanical arm ( Nine ): Forward kinematics analysis
Quick completion guide of mechanical arm ( Ten ): Reachable workspace
******************** Here is the main body ********************
stay guide ( Nine ) in , We have obtained a six degree of freedom manipulator Forward kinematics equation , By substituting joint variables into the equation, the position and posture of the end of the manipulator can be obtained . Now we know the rotatable range of each joint , that , At the same time, we can also get all the positions that the end of the manipulator can reach , We call this set of possible locations as Reachable workspace , And this is also an important parameter index of the manipulator .
Used in the guide MATLAB Medium Robotic Toolbox hold-all ( It's not official Robotics System Toolbox ) Kinematic simulation of the manipulator , The reachable workspace of the manipulator is obtained by Monte Carlo method, which is easy to implement and runs fast .

One 、 Joint space and drive space
Joint space description and driver space description are two methods used to describe the pose of manipulator .
1. Joint space
For one with n For a manipulator with three degrees of freedom , The positions of all its connecting rods can be determined by a group n Joint variables are confirmed
set . Such a set of variables is often called nx1 Joint vector . The space composed of all joint vectors is called Joint space .
2. Drive space
up to now , We have always assumed that every joint is directly driven by some kind of driver . However , This is not the case for many industrial robots , Sometimes we also use two drivers to drive a joint in a differential way , Sometimes, a linear driver is used to drive the rotating joint through a four-bar linkage .
In these cases , You need to consider the drive space . Because the sensor that measures the joint change of the manipulator is usually installed on the driver , Therefore, in some calculations, the joint vector must be expressed as a set of driver functions , Drive vector . The space composed of all drive vectors is called Drive space .
Two 、 working space (workspace)
working space (workspace) It is when all the joints of the manipulator perform all the possible movements , A collection of the origin positions of the end effector coordinate system . The workspace can be divided into Can be up to (reachable) working space And flexible (dexterous) working space .
Workspace is Co., LTD. 、 closed 、 coherent Of . Because joints are rotating or moving , It is easy to know that the workspace is composed of a plane 、 spherical 、 Composed of surface elements such as ring and cylinder . Manipulator manufacturers will give the workspace of the manipulator in the form of top view and flat view in the data manual , It is the basic element needed to evaluate the performance of the robot in the expected application .
1. Reachable workspace
The set of target points reached by the manipulator end effector in more than one direction is Reachable workspace .
2. Flexible workspace
The set of target points that the manipulator can reach in any direction is Flexible workspace .
3. Programming realization of reachable workspace calculation of manipulator
% Monte Carlo method simulates the reachable workspace of the manipulator
% Liu lie
radian1 = pi/180;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Definition DH Parameters %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Liu lie %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
d1 = 169.77;
d2 = 0;
d3 = 0;
d4 = -222.63;
d5 = 0;
d6 = -36.25;
% Mechanical arm link length parameter a
a1 = 64.2;
a2 = 305;
a3 = 0;
a4 = 0;
a5 = 0;
a6 = 0;
% Parameters of joint deflection angle of manipulator alpha
alpha1 = -90 * radian1;
alpha2 = 0 * radian1;
alpha3 = 90 * radian1;
alpha4 = -90 * radian1;
alpha5 = 90 * radian1;
alpha6 = 0 * radian1;
% Define joint angle limits
lim1_min = -170 * radian1; lim1_max = 170 * radian1; % The joints 1(-170,170)
lim2_min = -132 * radian1; lim2_max = 0 * radian1; % The joints 2(-132,0)
lim3_min = 1 * radian1; lim3_max = 141 * radian1; % The joints 3(1,141)
lim4_min = -165 * radian1; lim4_max = 165 * radian1; % The joints 4(-165,165)
lim5_min = -105 * radian1; lim5_max = 105 * radian1; % The joints 5(-105,105)
lim6_min = -155 * radian1; lim6_max = 155 * radian1; % The joints 6(-155,155)
% Define the range of joint rotation
lim1 = lim1_max - lim1_min;
lim2 = lim2_max - lim2_min;
lim3 = lim3_max - lim3_min;
lim4 = lim4_max - lim4_min;
lim5 = lim5_max - lim5_min;
lim6 = lim6_max - lim6_min;
% Define each link and joint type , The default is to rotate the joint
% θ d a α Angle limit Joint offset
L(1)=Link([ 0 d1 a1 alpha1]); L(1).qlim=[lim1_min,lim1_max];
L(2)=Link([ 0 d2 a2 alpha2]); L(2).qlim=[lim2_min,lim2_max];
L(3)=Link([ 0 d3 a3 alpha3]); L(3).qlim=[lim3_min,lim3_max]; L(3).offset=-pi/2;
L(4)=Link([ 0 d4 a4 alpha4]); L(4).qlim=[lim4_min,lim4_max];
L(5)=Link([ 0 d5 a5 alpha5]); L(5).qlim=[lim5_min,lim5_max];
L(6)=Link([ 0 d6 a6 alpha6]); L(6).qlim=[lim6_min,lim6_max]; L(6).offset=pi;
% Combine the above connecting rods
AR3=SerialLink(L,'name','AR3');
% Displays the number of manipulator joints and D_H parameter list
%AR3:: 6 axis, RRRRRR, stdDH, slowRNE
AR3.display();
% Use Monte Carlo method to draw the workspace of the manipulator
N=15000;
theta1 = ( lim1_min + (lim1 * rand(N,1)) );
theta2 = ( lim2_min + (lim2 * rand(N,1)) );
theta3 = ( lim3_min + (lim3 * rand(N,1)) );
theta4 = ( lim4_min + (lim4 * rand(N,1)) );
theta5 = ( lim5_min + (lim5 * rand(N,1)) );
theta6 = ( lim6_min + (lim6 * rand(N,1)) );
for n = 1:N
theta = [theta1(n),theta2(n),theta3(n),theta4(n),theta5(n),theta6(n)];
workspace = AR3.fkine(theta);
plot3(workspace.t(1),workspace.t(2),workspace.t(3),'b.','markersize',1);
hold on;
end
AR3.plot(theta); % Animation display
% Real time display of robots
AR3.teach();The specific programming process is : First, according to the definition in the previous chapter Kinematic parameters of manipulator Yes Robotic Toolbox Assignment of relevant parameters of the manipulator in the toolbox , In order to build the simulation model of the manipulator ; next , Generate 30000 Random joint variables , Substitute Forward kinematics equation To solve the ; Last , Mark the points representing the reachable position of the end effector in three-dimensional space , The dot matrix formed can represent the Reachable workspace , The running effect of the program is shown in the figure below .
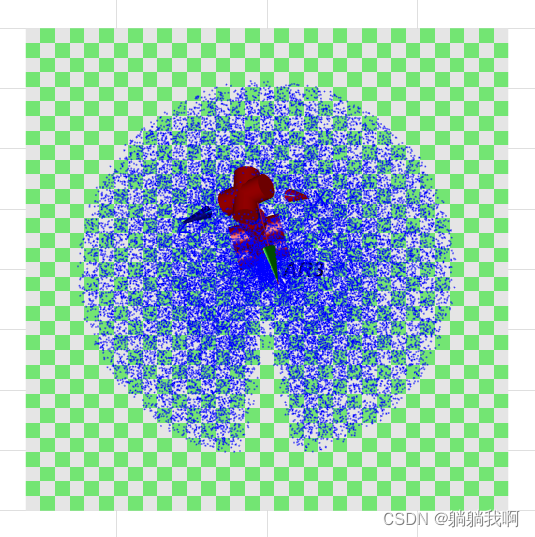 | 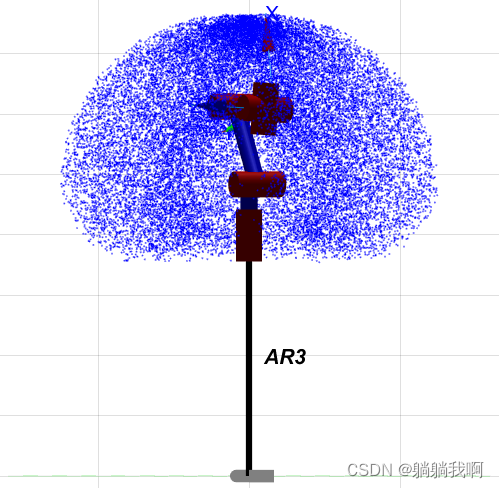 | 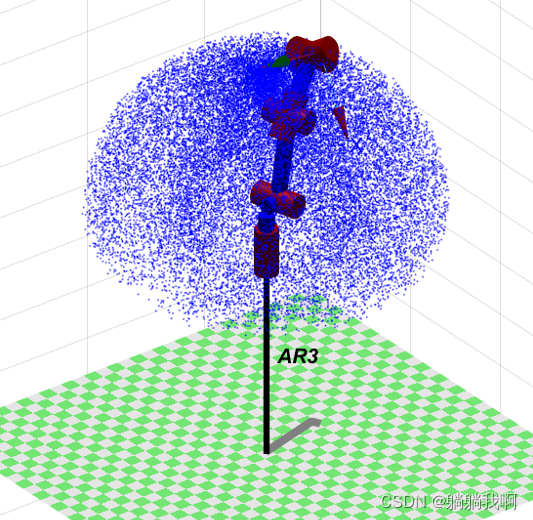 |
边栏推荐
- codeforces每日5题(均1700)-第七天
- Kbone与小程序跨端开发的一些思考
- 【OA】Excel 文档生成器: Openpyxl 模块
- [leetcode] 450 and 98 (deletion and verification of binary search tree)
- What is Ba? How about Ba? What is the relationship between Ba and Bi?
- 你心目中的数据分析 Top 1 选 Pandas 还是选 SQL?
- HW notes (II)
- 复杂因子计算优化案例:深度不平衡、买卖压力指标、波动率计算
- 浅谈网络安全之文件上传
- Clock in during winter vacation
猜你喜欢



随机推荐
ABAP Dynamic Inner table Group cycle
[dpdk] dpdk sample source code analysis III: dpdk-l3fwd_ 001
Redis源码学习(30),字典学习,dict.h
web服务性能监控方案
PHP 实现根据概率抽奖
SQL injection -day15
Baidu map JS development, open a blank, bmapgl is not defined, err_ FILE_ NOT_ FOUND
ERROR: Could not build wheels for pycocotools which use PEP 517 and cannot be installed directly
Delete data in SQL
如何检测mysql代码运行是否出现死锁+binlog查看
Ggplot facet detail adjustment summary
史上最全学习率调整策略lr_scheduler
Gpt-3 is a peer review online when it has been submitted for its own research
使用切面实现记录操作日志
【安全攻防】序列化与反序列,你了解多少?
Class常量池与运行时常量池
SSL证书部署
【knife-4j 快速搭建swagger】
Introduction to opensea platform developed by NFT trading platform (I)
Simple implementation of AVL tree insertion and verification operations