当前位置:网站首页>Opencv learning notes - linear filtering: box filtering, mean filtering, Gaussian filtering
Opencv learning notes - linear filtering: box filtering, mean filtering, Gaussian filtering
2022-07-04 14:33:00 【cc_ rong】
Smoothing ( blurred )
Generally used Reduce noise or distortion on the image . When reducing the image resolution , Use smoothing .
Eliminating noise components in an image is called Image smoothing or Filtering operation .
The purpose of image filtering is :
1、 Extract the feature of the object as the feature pattern of image recognition ;
2、 In order to meet the requirements of image processing , Eliminate the noise in image digitization .
Smooth filtering It's low-frequency enhanced spatial filtering technology . It has two purposes :
1、 Fuzzy ; 2、 Eliminate noise .
Common image smoothing operation methods :
linear :
Box filtering ---------BoxBlur function
Mean filtering ( Neighborhood average filtering )---------Blur function
Gauss filtering ---------GaussianBlur function
nonlinear :
median filtering ---------medianBlur function
Bilateral filtering ---------bilateralFilter function
Linear filter
Linear filters are often used to eliminate unwanted frequencies in input signals or to select a desired frequency from many frequencies .
Common linear filters are as follows :
low pass filter : Allow low frequencies to pass through ;
High pass filter : Allow high frequency passage ;
Bandpass filter : Allow a certain range of frequencies to pass ;
Band stop filter : Prevent a certain range of frequencies from passing and allow other frequencies to pass ;
All pass filter : Allow all frequencies to pass through , Just change the phase relationship ;
Notch filter : Prevent a narrow frequency range from passing through , It is a special band stop filter .
Box filtering
boxBlur function sources\modules\imgproc\src Under the smooth.cpp
void boxFilter(InputArray src, OutputArray dst, int ddepth, Size ksize, Point anchor = Point(-1,-1), bool normalize = true, int borderType = BORDER_DEFAULT )Parameters 1,src, The input image , Source image , fill Mat Class object . This function is independent of the channel , And can Process pictures with any number of channels . Be careful , The depth of the image to be processed should be CV_8U、CV_16U、 CV_16S、CV_32F as well as CV_64F One of .
Parameters 2,dst, The target image , Need the same size and type as the source image .
Parameters 3,ddepth, The depth of the output image ,-1 Represents the depth of the original image , namely src.depth().
Parameters 4,ksize, The size of the kernel . It's usually used Size(w, h) To represent the size of the kernel , among w For pixel width ,h by Pixel height .Size(3, 3) It means 3 x 3 The nuclear size of ,Size(5, 5) It means 5 x 5 The nuclear size of .
Parameters 5,anchor, Represents an anchor ( The point that is smoothed ). The default value is Point(-1,-1). If the coordinate of this point is negative If it's worth it , It means that the center of the core is the anchor point , So the default value is Point(-1,-1) Indicates that this anchor is in the core heart .
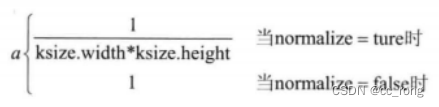
Parameters 6,normalize, The default value is true, Indicates whether the kernel is normalized by its region (normalized)
Parameters 7,borderType, Some kind of boundary pattern used to infer pixels outside the image . The default value is : BORDER_DEFAULT, Generally not used .
boxFilter The kernel representation of the function :
among
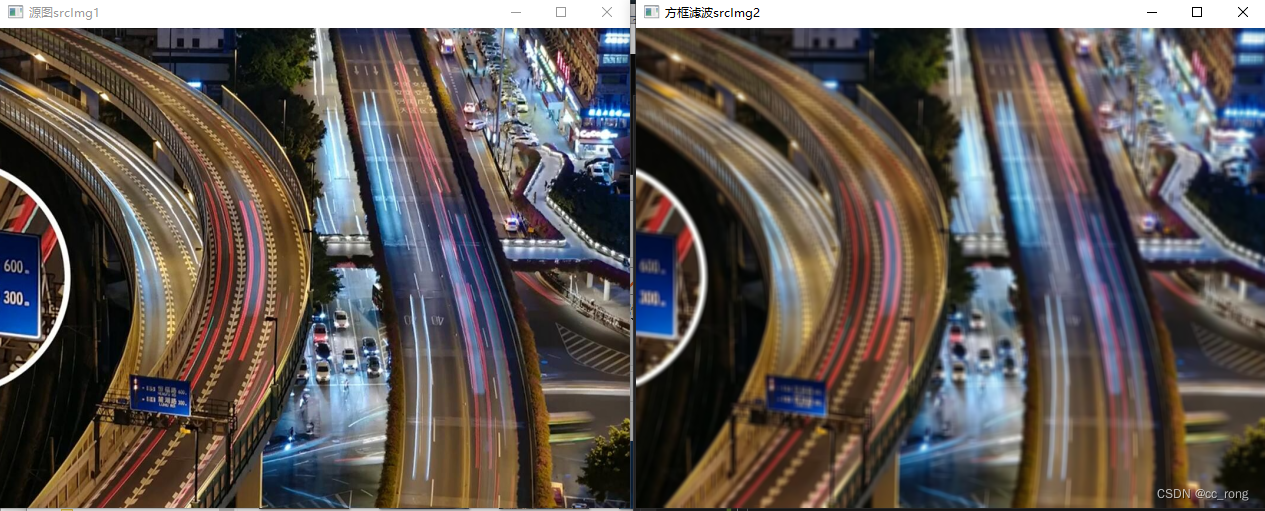
According to the effect :
ksize The bigger it is , The more blurred the picture is .
Code :
Mat srcImg1; Mat srcImg2; srcImg1 = imread("E:\\img\\logo3.png"); imshow(" Source graph srcImg1", srcImg1); boxFilter(srcImg1, srcImg2, -1, Size(14, 18)); imshow(" Box filtering srcImg2", srcImg2);

Mean filtering
Each pixel of the output image of the mean filter is the average value of the corresponding pixel of the input image in the kernel window ( All pixels are weighted equally ), That is, normalized block filtering .Mean filtering is A typical linear filtering algorithm . The main method is Neighborhood averaging , That is to use the average value of each pixel in an image area to replace the value of each pixel in the original image .defects :Cannot protect image details well , While denoising the image, it also destroys the details of the image , Make the image blurred , It can't remove the noise very well .void blur(InputArray src, outputArraydst, Size ksize, Point anchor = Point(-1, -1), int borderType = BORDER_DEFAULT)Parameters 1, The input image , Source image ,Mat Class object . This function is independent of the channel , And can handle any Picture of the number of channels . Be careful , The depth of the image to be processed should be CV_8U、CV_16U、CV_16S、 CV_32F as well as CV_64F One of .
Parameters 2, Target image , Need the same size and type as the source image . It can be used Mat::Clone, Take the source image as the model plate , To initialize the target graph .
Parameters 3, The size of the kernel . It's usually used Size(w, h) To represent the size of the kernel , among w For pixel width ,h Is pixel high degree .Size(3,3) It means 3x3 The nuclear size of ,Size(5,5) It means 5x5 The nuclear size of .
Parameters 4, Represents an anchor ( The point that is smoothed ). The default value is Point(-1,-1). If the coordinates of this point are negative , It means that the center of the core is the anchor point , So the default value is Point(-1,-1) It means that the anchor is in the center of the core .
Parameters 5, Some kind of boundary pattern used to infer pixels outside the image . The default value is BORDER_DEFAULT, Generally do not make use .
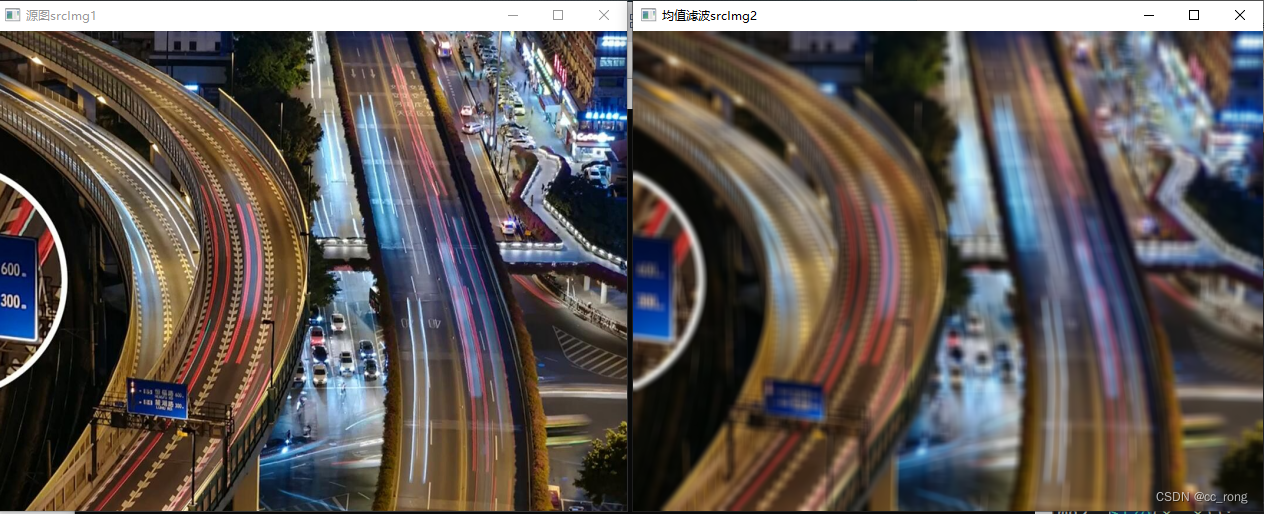
According to the effect :
Code :
Mat srcImg1; Mat srcImg2; srcImg1 = imread("E:\\img\\logo3.png"); imshow(" Source graph srcImg1", srcImg1); blur(srcImg1, srcImg2, Size(18, 18)); imshow(" Mean filtering srcImg2", srcImg2);
Gauss filtering
Gaussian filtering refers to the filtering operation using Gaussian function as the filtering function ;
Application scenarios : Noise reduction process of image processing .
The specific implementation of Gaussian filtering :
Use a template ( Convolution 、 Mask ) Scan every pixel in the image , Using the weighted average gray value of the pixels in the neighborhood determined by the template to replace the value of the central pixel of the template .
Gaussian blur of image is the convolution of image and normal distribution .Gaussian blur is a Gaussian low-pass filter .GaussianBlur function : Blur an image with a Gaussian filterConvolute the source image with the specified Gaussian kernel function , And support local filtering .void GaussianBlur(InputArray src, outputArray dst, Size ksize, double sigmaX, double sigmaY = 0, int borderType = BORDER_DEFAULT )Parameters 1, The input image , fill Mat Class object . It can be a single picture with any number of channels ,
Be careful , The picture depth should be CV_8U、CV_16U、CV_16S、CV_32F as well as CV_64F One of .
Parameters 2, Target image , Need the same size and type as the source image . It can be used Mat::Clone, Take the source image as the model plate , To initialize the target graph .
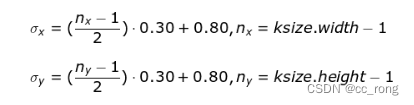
Parameters 3, The size of the Gaussian kernel . among ksize.width and ksize.height Can be different , Must be positive and odd ,
Or zero , All by sigma Come by calculation .
Parameters 4, Denotes that the Gaussian kernel function is in X The standard deviation of the direction .
Parameters 5, Denotes that the Gaussian kernel function is in Y The standard deviation of the direction . if sigmaY zero , Set it to sigmaX;
If sigmaX and sigmaY All are 0, from ksize.width and ksize.height Work it out .
Parameters 6, Some kind of boundary pattern used to infer pixels outside the image . The default value is BORDER_DEFAULT, Generally do not make use .
According to the effect :
Code :
Mat srcImg1; Mat srcImg2; srcImg1 = imread("E:\\img\\logo3.png"); imshow(" Source graph srcImg1", srcImg1); GaussianBlur(srcImg1, srcImg2, Size(5, 5), 0, 0); imshow(" Gauss filtering srcImg2", srcImg2);

边栏推荐
- MySQL triggers
- Wt588f02b-8s (c006_03) single chip voice IC scheme enables smart doorbell design to reduce cost and increase efficiency
- R language ggplot2 visualization: gganimate package creates animated graph (GIF) and uses anim_ The save function saves the GIF visual animation
- Nowcoder rearrange linked list
- Solutions aux problèmes d'utilisation de l'au ou du povo 2 dans le riz rouge k20pro MIUI 12.5
- 数据湖(十三):Spark与Iceberg整合DDL操作
- An overview of 2D human posture estimation
- [information retrieval] experiment of classification and clustering
- [cloud native] how can I compete with this database?
- Matters needing attention in overseas game Investment Agency
猜你喜欢

Classify boost libraries by function

Xcode abnormal pictures cause IPA packet size problems
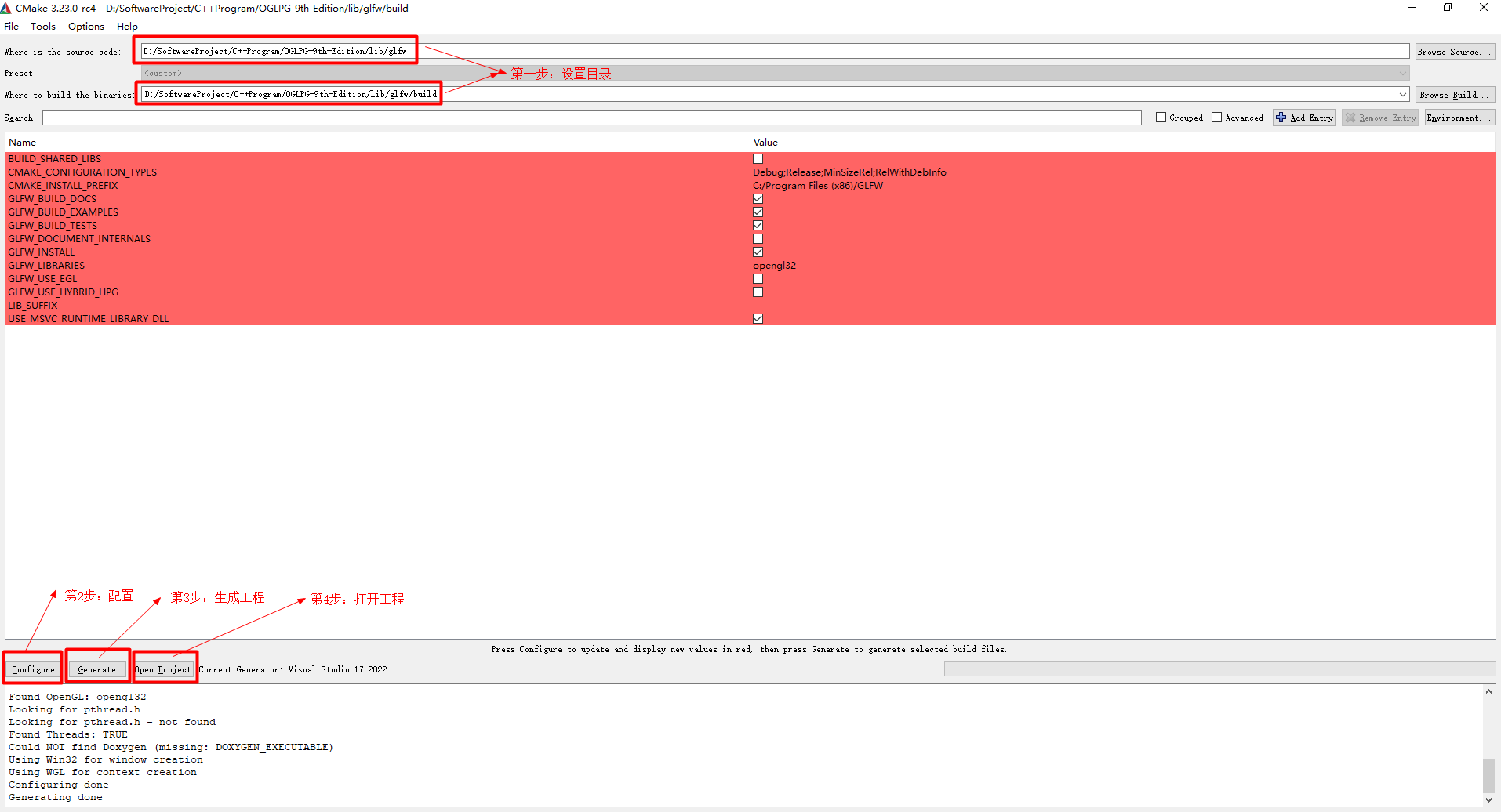
使用CLion编译OGLPG-9th-Edition源码
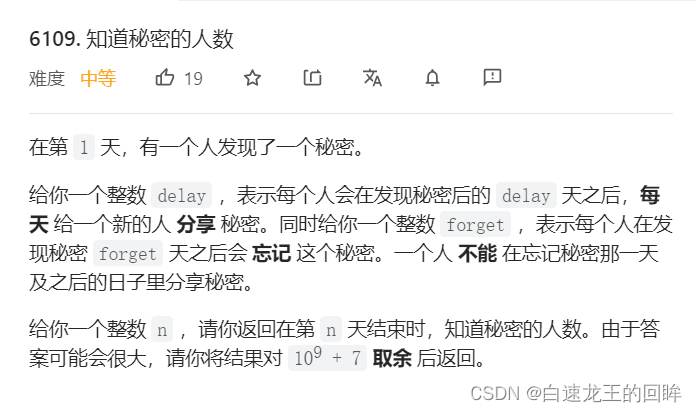
leetcode:6109. 知道秘密的人数【dp的定义】

92.(cesium篇)cesium楼栋分层
![Incremental ternary subsequence [greedy training]](/img/92/7efd1883c21c0e804ffccfb2231602.png)
Incremental ternary subsequence [greedy training]

Visual Studio调试方式详解
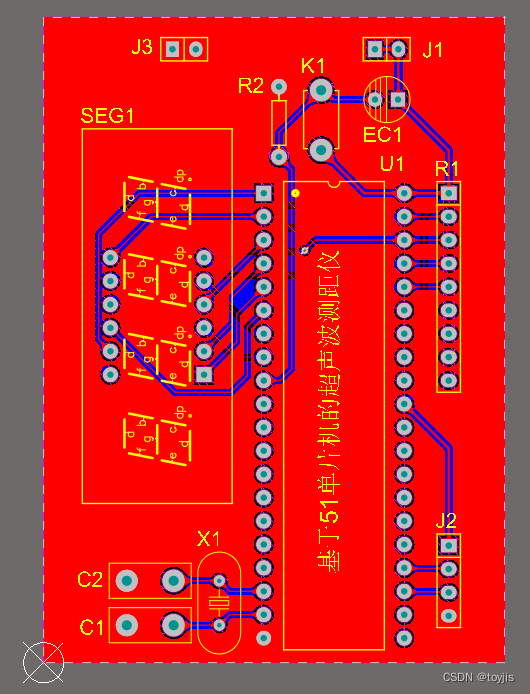
Ultrasonic distance meter based on 51 single chip microcomputer

LVGL 8.2 Draw label with gradient color
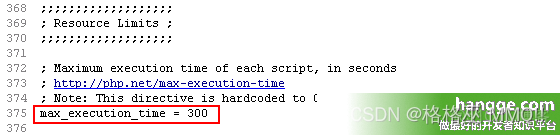
统计php程序运行时间及设置PHP最长运行时间
随机推荐
Data warehouse interview question preparation
Opencv3.2 and opencv2.4 installation
尊重他人的行为
第十七章 进程内存
深度学习7 Transformer系列实例分割Mask2Former
软件测试之测试评估
MySQL的存储过程练习题
Map of mL: Based on Boston house price regression prediction data set, an interpretable case is realized by using the map value to the LIR linear regression model
电商系统中红包活动设计
Intelligence d'affaires bi analyse financière, analyse financière au sens étroit et analyse financière au sens large sont - ils différents?
Leetcode T48:旋转图像
Excel quickly merges multiple rows of data
[MySQL from introduction to proficiency] [advanced chapter] (IV) MySQL permission management and control
92. (cesium chapter) cesium building layering
LVGL 8.2 Sorting a List using up and down buttons
Nowcoder rearrange linked list
聊聊保证线程安全的 10 个小技巧
Leetcode T48: rotating images
codeforce:C. Sum of Substrings【边界处理 + 贡献思维 + 灵光一现】
GCC [6] - 4 stages of compilation