当前位置:网站首页>Common debugging tools and commands for ROS
Common debugging tools and commands for ROS
2022-06-12 11:58:00 【Sunward flowers bloom_】
One .ROS Common command notes
1.rosrun Run the program
2.roslaunch Run script Such as roslaunch rbx1 fake_pi_robot.launch
3. see ROS_PACKAGE_PATH environment variable echo $ROS_PACKAGE_PATH
4. Get the list of running nodes rosnode list
5. Show the topic of the node rostopic list
6. Display the services of the node rosservice list
7. Get the type of message sent by a specific topic rosmsg show
8. Display node graph rqt_graph (rqt_graph Tools can see nodes and topics , And which nodes subscribe to which hosts
Questions, etc . There are no messages in this node state diagram 、 Message logging package 、 Parameter servers and services )
rqt_graph

9. Display the structure of the message Such as rosmsg show nav_msgs/Odometry View odometer message structure
10. View topic information Such as rostopic echo /odom/pose/pose View the location information of the odometer topic
11. start-up rqt_logger_level Graphic tool rosrun rqt_logger_level rqt_logger_level( Used for setting up log The display level of )
12. start-up rqt_console Graphic tool rqt_console( Used to display such as ROS_INFO Such debugging information )
13. start-up rqt_top Graphic tool rosrun rqt_top rqt_top
View the resource usage of each node 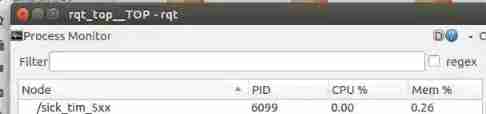
14. start-up rqt_topic Graphic tool rosrun rqt_topic rqt_topic
see topic The type of , Current published values, etc 
15. Analyze the potential problems of the package ,roswtf
16. Start the visual monitor rosrun rqt_runtime_monitor rqt_runtime_monitor
17. Start the graphic viewer rosrun rqt_image_view rqt_image_view
18. Dynamic parameter configuration
rosrun rqt_reconfig rqt_reconfig
22. start-up rqt_gui Graphic tool rosrun rqt_gui rqt_gui
Or enter a command rqt, You can view it as shown in the following figure 
23. Start the keyboard controller rosrun teleop_twist_keyboard teleop_twist_keyboard.py
24. Update environment variables source devel/setup.bash
25. Installation package : Such as ros-hydro- Package name
sudo apt-get install ros-hydro-teleop-twist-keyboard
26. Dependencies required to install the package
Such as rosdep install --from-paths src --ignore-src --rosdistro indigo
27.ubuntu Zhongyou apt-get The obtained package is saved /var/cache/apt/archives
28.rospy.loginfo When the information is displayed to the console, it is also written log file ,log The file location is
~/.ros/log
29.ros Node usage gdb debugging
If you use roslanch start-up ros node , Join in
launch-prefix="xterm -e gdb --args "
Such as
<node name="vins_estimator" pkg="vins_estimator" type="vins_estimator" output="screen" launch-prefix="xterm -e gdb -ex run --args ">
Two .TF Commands for using function packs
1.view_frames Be able to monitor all passes at the current moment ROS Broadcast tf Coordinate system , And draw a tree view to show the connection relationship between coordinate systems and save it to an offline file
rosrun tf view_frames

The saved figure is as follows :
2.rqt_tf_tree Tools
although view_frames The current coordinate system relationship can be saved in an offline file , But it can not reflect the coordinate relationship in real time , So it can be used rqt_tf_tree Real time refresh to display coordinate system relations :
$rosrun rqt_tf_tree rqt_tf_tree

3…tf_echo Tools
Use tf_echo The tool can view the relationship between two broadcast reference systems , Directly display the relationship between different coordinate systems in the terminal
Such as :
rosrun tf tf_echo map base_link

3、 ... and .bag The order of the bag
- . Start recording all rosbag record -a
- Play bag file rosbag play
- see
bagfile information rosbag info - start-up
rqt_bag GraphicalTools rqt_bag
Four . image_transport Package usage and instructions
边栏推荐
- 淘宝新改版商家如何操作,需要注意的点有哪些
- ARP protocol data processing process of neighbor subsystem
- Jump instruction of arm instruction set
- Channel Shuffle类
- How to operate the newly revised Taobao merchants and what should be paid attention to
- Doris记录服务接口调用情况
- Data processing instructions of arm instruction set
- Google Earth engine (GEE) - quick land classification by kmeans clustering (double for loop quick parameter adjustment)
- The second regular match is inconsistent with the first one, and the match in the regular loop is invalid
- MySQL - built in function
猜你喜欢

Cookies and sessions

Rich text editor copying pictures in word documents

异步路径处理

TinyMCE realizes automatic uploading of pasted pictures

ARM指令集之批量Load/Store指令

Inter class and intra class relations in video classification -- regularization

5g NR protocol learning -- ts38.211 downlink channel

UML series articles (31) architecture modeling - deployment diagram

6.6 separate convolution
promise的理解已经利用promise实现图片的预加载(顺序加载)
随机推荐
无重复字符的最长字符串(LeetCode 3)
ARM指令集之批量Load/Store指令
Asynchronous path processing
LeetCode 890. 查找和替换模式(模拟+双哈希表)
conda环境下pip install 无法安装到指定conda环境中(conda环境的默认pip安装位置)
机器学习基础概念
6.6 rl:mdp and reward function
【深度学习基础】神经网络的学习(4)
LeetCode_ Binary search_ Medium_ 162. looking for peaks
LeetCode 497. 非重叠矩形中的随机点(前缀和+二分)
Lambda and filter, index of list and numpy array, as well as various distance metrics, concatenated array and distinction between axis=0 and axis=1
Reasons for SSL introduction and encryption steps
Judge whether the network file exists, obtain the network file size, creation time and modification time
Batch load/store instructions of arm instruction set
System.IO.FileLoadException异常
【数据库】sqlite版本升级、降级
TinyMCE series (I) TinyMCE environment construction
Cookies and sessions
LeetCode 890. Find and replace mode (analog + double hash table)
Neighbor item status update of neighbor subsystem