当前位置:网站首页>Introduction Guide to stereo vision (6): level constraints and polar correction of fusiello method
Introduction Guide to stereo vision (6): level constraints and polar correction of fusiello method
2022-07-05 08:56:00 【Li Yingsong~】
Dear students , Our world is 3D The world , Our eyes can observe three-dimensional information , Help us perceive distance , Navigation obstacle avoidance , So as to soar between heaven and earth . Today's world is an intelligent world , Our scientists explore a variety of machine intelligence technologies , Let the machine have the three-dimensional perception of human beings , And hope to surpass human beings in speed and accuracy , For example, positioning navigation in autopilot navigation , Automatic obstacle avoidance of UAV , Three dimensional scanning in the measuring instrument, etc , High intelligent machine intelligence technology is 3D Visual realization .
Stereo vision is an important direction in the field of 3D reconstruction , It simulates the structure of the human eye and simulates the binocular with two cameras , Project in Perspective 、 Based on triangulation , Through the logical complex homonymous point search algorithm , Restore the 3D information in the scene . It is widely used , Autopilot 、 Navigation obstacle avoidance 、 Cultural relic reconstruction 、 Face recognition and many other high-tech applications have its key figure .
This course will help you to understand the theoretical and practical knowledge of stereo vision from simple to profound . We will talk about the coordinate system and camera calibration , From passive stereoscopic to active stereoscopic , Even from deep recovery to grid construction and processing , Interested students , Come and explore the charm of stereovision with me !
This course is an electronic resource , So there will not be too many restrictions in the writing , But it will be logically clear 、 Easy to understand as the goal , Level co., LTD. , If there are deficiencies , Please give me some advice !
Personal wechat :EthanYs6, Add me to the technical exchange group StereoV3D, Talk about technology together .
CSDN Search for :Ethan Li Li Yingsong , see Web based courses .
Lesson code , Upload to github On , Address :StereoV3DCode:https://github.com/ethan-li-coding/StereoV3DCode
I've kept you waiting , Recent job changes , Still adapting , I hope you have a lot of !
In the previous post , We have covered the basics and camera calibration , Students must be thinking about which direction to go next , After camera calibration , The pose of the camera is determined , And then , It's natural to take pictures with a camera , After collecting the images ? What should we do ?
Back to the ultimate goal of stereovision , It calculates the three-dimensional coordinates of the scene by double view matching of the image , In this introductory series , I have to explain in advance what is Binocular matching , Especially the meaning of "match" .
matching , English is match, Literally , Yes, it will N(N>=2) Two goals go together , this N Goals usually have some common or similar attributes , For example, the left and right of a pair of headphones , They belong to the same pair of earphones , Like you and your brothers and sisters , You are all your parents' children . Naturally , Binocular matching , In two views , Find pixel pairs with common attributes , In stereovision , This common attribute is : They are projections of the same point in space in their respective views , That is, they represent the same point in space .
Then why do you want to do double view matching ? It starts with triangulation ,
Triangulation is a very simple concept , It refers to the determination of two points and the rays starting from two points , You can calculate the coordinates of another point where the two rays intersect , Three points form a triangle , So it is called triangulation .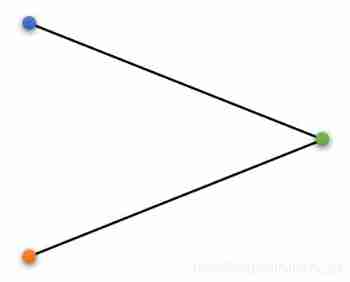
Corresponding to stereo vision , The three points are : The optical center point of two cameras and a spatial point , The position of the optical center is determined by calibration , The two rays are the connecting lines between the two optical centers and the space points , If two more rays are identified , You can calculate the coordinates of the space points , Someone asked , How to determine two rays ? That's what the match has to do .
Let's add something to the picture above , The two points on the left are the optical centers of the two cameras C C C, A point on the right is a spatial point P P P, Add an image plane in front of the optical center I I I( As I said in my previous blog post , What looks like a plane is actually behind the optical center , To get to the front is equivalent , But it's more intuitive to understand ). The intersection of the line between the space point and the optical center and the image plane is p p p.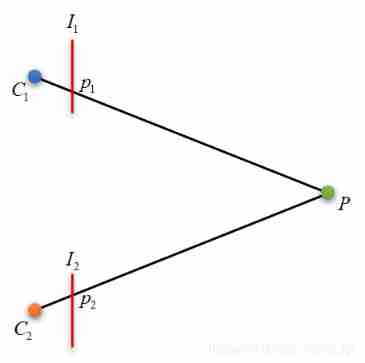
On the other hand , p p p It's a space point P P P Projection point on the image , That is, we see the image of the object on the image .
Okay , Back to the previous question , How to determine the ray C 1 P , C 2 P C_1P,C_2P C1P,C2P Well ? obviously , An obvious identity relationship in the figure is , C 1 P ≡ C 1 p 1 , C 2 P ≡ C 2 p 2 C_1P\equiv C_1p_1,C_2P\equiv C_2p_2 C1P≡C1p1,C2P≡C2p2, So determine the ray C 1 P , C 2 P C_1P,C_2P C1P,C2P It can be converted into definite rays C 1 p 1 , C 2 p 1 C_1p_1,C_2p_1 C1p1,C2p1. C 1 , C 2 C_1,C_2 C1,C2 We have got through calibration , and p 1 , p 2 p_1,p_2 p1,p2 The process of determining is called matching . In general , We give a pixel p 1 p_1 p1, Find the corresponding matching point in another view p 2 p_2 p2, Once you find it, you can calculate P P P 了 .
Okay , That's all for the definition of matching . Let's go back to today's theme : A contrapolar constraint .
Why study contrapolar constraints
In computer science , Given a definite problem , There must be various algorithms to study how to solve it , Then it comes to how to solve it efficiently , And they don't go in sequence , But cross , That is, the study of the most definite solution and the study of the most efficient solution are carried out simultaneously . For the matching problem , Find the corresponding matching point for this problem , It's not a simple problem , For decades, , No one algorithm can find all the right matching pairs perfectly , The angle produces affine distortion between images 、 Weak texture 、 Repeat texture 、 Dark light 、 Overexposure 、 Transparency, etc , There are a lot of headaches , And some seem to have no solution , However, this does not prevent many scholars from studying this issue , So many excellent algorithms are produced , Many have been proved to be accurate and efficient in practical engineering applications ( The accuracy here does not mean that they are geometrically accurate , It means engineering precision ).
Back to the point , Anyone familiar with the idea of optimization knows , When it comes to the word search space , Someone will naturally think of how to reduce the search space to improve the search efficiency , After all, our computer is designed by people in three-dimensional space , Its motion must also follow the law of three-dimensional space , No high-dimensional space folding ability , The search is still limited by the size and distance of the space , But there are a few things we can do :
- Make its motion space smaller .
- Make it stay less where there is no target point .
our Level constraints Just to do the first thing , Make the matching search space smaller , Omit pixels that are completely impossible to solve . Simply speaking , Two pixels as a match , It must satisfy a constraint formula , If not, it is definitely not a matching point . This can save a lot of meaningless search , But a little regret , This constraint is not the only constraint , That is, for a pixel on the left view , There are still many pixels in the right view that meet this constraint , So we can only narrow the search space , The solution cannot be determined directly .
A contrapolar constraint , Is to constrain the search space to a straight line in the image plane , Let's talk about this slowly .
Polar plane and polar line
How did the antipolar constraint come about ? Let's look at the picture below :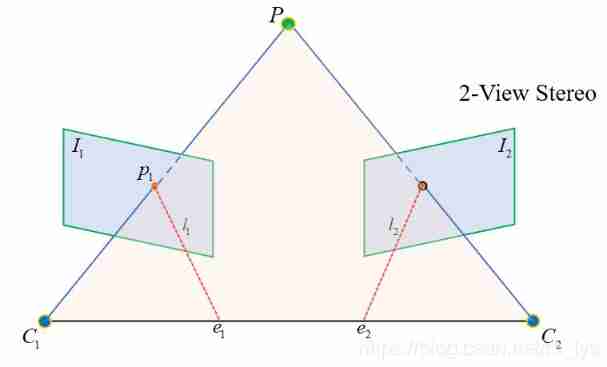
Light heart O 1 , O 2 O_1,O_2 O1,O2( Forgive me for changing the symbol ) And spatial points P P P Form a triangular relationship , In fact, they define a spatial plane , This plane intersects with both image planes , The intersection lines are l 1 , l 2 l_1,l_2 l1,l2, Use our imagination , It's easy to see , stay l 1 l_1 l1 All the points on the , His matching point must be l 2 l_2 l2 On , This is the antipolar constraint , It limits the matching search space to a straight line , Greatly reduce the search space , Improve matching efficiency . And two straight lines l 1 , l 2 l_1,l_2 l1,l2 It's called epipolar , We can call them both Polar pair . Remember this concept , There will be .
How to determine this straight line ? We know O 1 , O 2 , p O_1,O_2,p O1,O2,p, You can calculate the plane O 1 p O 2 O_1pO_2 O1pO2 The equation of , It's like a plane I 2 I_2 I2( Namely p 2 p_2 p2 The image plane ) The intersecting straight line is l 2 l_2 l2, With l 2 l_2 l2 The equation of can be in the image plane I 2 I_2 I2 Traverse the line one by one l 2 l_2 l2 Pixels on . In sparse point matching , We can do this to improve search efficiency .
Epipolar correction
Okay , Above, we talked about level constraints , We understand its concept and spatial significance , Now I want to talk about an important concept : Epipolar correction , The same question , Why talk about it , In the previous chapter we mentioned , Level constraints allow us to reduce the search space , With pair level constraints , For a pixel in the left view p 1 p_1 p1, The matching points in the right view can be calculated p 2 p_2 p2 The polar line where it is l 2 l_2 l2, Thus in l 2 l_2 l2 Search for the correct solution . Sounds really good , Greatly reduce the search space , But it still has one drawback , For each pixel to be matched in the left view , We have to calculate the corresponding polar line , If I have a lot of pixels to match ( This is the research direction of dense matching : Match pixel by pixel ), That's a lot of calculation .
Is there a way , You don't have to calculate , Directly determine the polar line on the right ?
The answer, of course, is , Epipolar correction Is to answer this question !
Or look at the picture above , We will find further , Polar line l 1 l_1 l1 All pixels and l 2 l_2 l2 The pixels on satisfy the same constraint formula , That is to say, the polar line l 1 l_1 l1 All pixels on , Calculated corresponding polar line , It's all the same l 2 l_2 l2. The reason is , Because they all belong to the same polar plane ! So you can think of it this way , One polar plane can find a pair of polar lines in two views , All pixels on this pair of epipolar lines satisfy the same constraint formula , Multiple polar planes generate multiple polar pairs , Many polar pairs can cover all pixels on the image !
further , We can rearrange the pixels on these polar pairs in the image plane , Pixels on the same polar pair are arranged in the same row , In this way, we can determine the pixels of the same polar pair by line number , No need to calculate the polar equation . in short , Left view pixels p 1 p_1 p1 The matching point of must be located in the row of pixels with the same row number in the right view .
The above is a simple explanation of epipolar correction . And geometrically , We have a more professional explanation :
Epipolar correction is done by rotating two cameras , And redefine the new image plane , Let the epipolar pairs be collinear and parallel to a coordinate axis of the image plane ( Usually the horizontal axis ), This operation also creates a new stereo pair . After correction , Same matching point pair , In the same row of both views , This means that they only have horizontal coordinates ( Or column coordinates ) The difference of , This difference is called parallax ( Abbreviation d d d), Mathematically , parallax d = c o l ( p 1 ) − c o l ( p 2 ) d=col(p_1)-col(p_2) d=col(p1)−col(p2)( c o l col col Refers to horizontal coordinates , Or column coordinates $)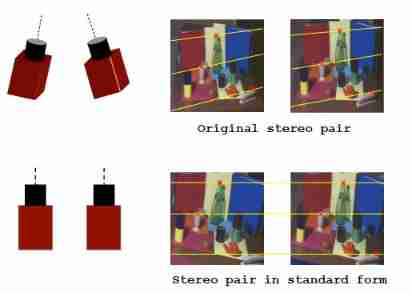
This operation makes dense matching much easier , Of course , It's just relatively easy .
Explain the concept and significance of epipolar correction , Another thing we care about is , How to do epipolar correction ?
There are different ways to do this , Today we mainly talk about Fusiello Correction method .
Let's look at our goals first :
- A polar pair is parallel to a coordinate axis .
- Polar pairs are collinear , The matching point pairs are located on the same row of the image plane .
To achieve these two goals , We need to do different analyses , It was said that , Epipolar correction is done by rotating the camera and redefining the image plane , actually , The essence of the two operations is to redefine the projection matrix M = K [ R ∣ − R C ] M=K[R|-RC] M=K[R∣−RC]. Redefine the rotation matrix by rotating the camera R → R n R\rightarrow R_n R→Rn Make the new image plane coplanar and parallel to the camera baseline , Can meet the goal 1, And redefine the internal parameters of the image plane K → K n K\rightarrow K_n K→Kn Make both cameras have the same internal parameters , Can meet the goal 2.
As shown in the figure below , Corrected image plane , level u u u Axis and baseline C 1 C 2 C_1C_2 C1C2 parallel , The focal length f f f Equal to the coordinates of the principal point .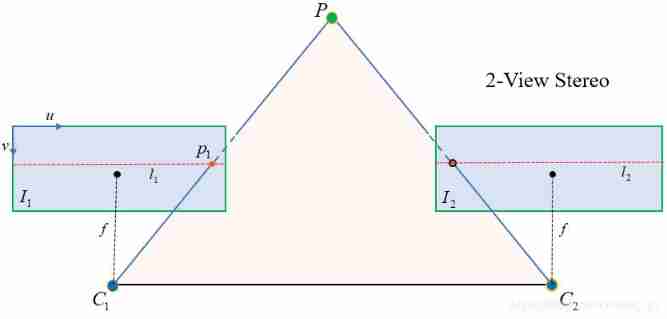
- First of all X X X Axis , Obviously, it should be parallel to the camera baseline , To make the image plane parallel to the camera baseline , therefore X X X The axis base vector is r x = ( C 2 − C 1 ) / ∣ ∣ C 2 − C 1 ∣ ∣ r_x=(C_2-C_1)/||C_2-C_1|| rx=(C2−C1)/∣∣C2−C1∣∣.
- The second is Y Y Y Axis , It is and X X X Axis orthogonal , You can set an arbitrary unit vector k k k, Give Way Y Axis and X X X Axes and vectors k k k orthogonal , therefore Y Y Y The base vector of the axis is r y = k × r x r_y=k\times r_x ry=k×rx. About this k k k, Theoretically, anything can , However, we hope that the range of the image in the new coordinate system is consistent with that of the original image , So try to choose the old Y Y Y The approximate orientation of the axis , stay Fusiello In law , k k k For the old Z Z Z The unit vector represented by the axis .
- And finally Z Z Z Axis , X X X and Y Y Y After the axis is determined , Z Z Z The basis vector of the axis can be obtained by the cross multiplication of the two based on the right-hand rule : r z = r x × r y r_z=r_x \times r_y rz=rx×ry
Determine the new coordinate system 3 Base vectors , You can determine the new rotation matrix
R n = [ r x T r y T r z T ] R_n=\left[\begin{matrix}r_x^{\text T}\\r_y^{\text T}\\r_z^{\text T}\end{matrix}\right] Rn=⎣⎡rxTryTrzT⎦⎤
On this point , You can take a look at my previous blog Understand rotation matrix from the perspective of base transformation R.
The second step , Is to redesign the new internal parameter matrix K n K_n Kn, Theoretically , K K K It can be set arbitrarily , But in order to be consistent with the old camera ,Fusiello What cannot be chosen is K n = ( K l e f t + K r i g h t ) / 2 K_n=(K_{left}+K_{right})/2 Kn=(Kleft+Kright)/2. And put the tilt factor s s s Set to 0.
determine K K K and R R R after , We get a new projection matrix M n = K n [ R n ∣ − R n C ] M_n=K_n[R_n|-R_nC] Mn=Kn[Rn∣−RnC].
Next is the calibration process , The specific process is for new image pixels p n p_n pn, By transforming the matrix T T T Calculate the pixels on the old image p p p: p = T p n p=Tp_n p=Tpn, Then the pixel value is obtained by bilinear interpolation and assigned to the new image . So the key is how to get the transformation matrix T T T.
For the moment , We rotated the camera and redefined the internal parameters , This transforms the rotation matrix R → R n R\rightarrow R_n R→Rn And internal parameter matrix K → K n K\rightarrow K_n K→Kn, What hasn't changed is the center of the camera C C C. So we now have two sets of projection matrices, old and new
M = K [ R , − R C ] = [ Q ∣ − Q C ] M n = K n [ R n , − R n C ] = [ Q n ∣ − Q n C ] \begin{aligned} M&=K[R,-RC]&&=[Q|-QC]\\ M_n&=K_n[R_n,-R_nC]&&=[Q_n|-Q_nC] \end{aligned} MMn=K[R,−RC]=Kn[Rn,−RnC]=[Q∣−QC]=[Qn∣−QnC]
among , Q = K R , Q n = K n R n Q=KR,Q_n=K_nR_n Q=KR,Qn=KnRn.
Suppose a point in space P P P, Its projection expressions under the new and old projection matrices are :
λ p = M P = [ Q ∣ − Q C ] P λ n p n = M n P = [ Q n ∣ − Q n C ] P \begin{aligned} \lambda p&=MP&&=[Q|-QC]P\\ \lambda_n p_n&=M_nP&&=[Q_n|-Q_nC]P \end{aligned} λpλnpn=MP=MnP=[Q∣−QC]P=[Qn∣−QnC]P
Because equations are homogeneous expressions ( p = [ u , v , 1 ] , P = [ X , Y , Z , 1 ] p=[u,v,1],P=[X,Y,Z,1] p=[u,v,1],P=[X,Y,Z,1]), therefore λ \lambda λ Can be set to 1. The above formula is expanded to
p = Q ( P − C ) p n = Q n ( P − C ) \begin{aligned} p&=Q(P-C)\\ p_n&=Q_n(P-C) \end{aligned} ppn=Q(P−C)=Qn(P−C)
Available :
p n = Q n Q − 1 p p_n=Q_nQ^{-1}p pn=QnQ−1p
This is the conversion formula of old and new images , and T = Q n Q − 1 T=Q_nQ^{-1} T=QnQ−1 That is, the transformation matrix .
For two cameras , According to the formula, the respective transformation matrix can be calculated T 1 , T 2 T_1,T_2 T1,T2.
Advantages and disadvantages
Fusiello The principle of law is very simple , Low computational complexity , And can be highly parallel , It's a good algorithm .
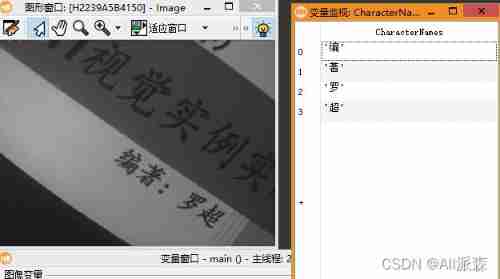
But there are some disadvantages , It assigns the same internal parameters to the new camera , In fact, it is not reasonable for a dual camera system with a large angle , Pictured 3 Shown , Keep the position of the main point approximately equal to the position of the old main point , For the original image pair with large included angle , The overlap area is significantly reduced , This is what we don't want to see , And if you set different primary coordinates for two cameras ( Specifically, it is the main point x x x coordinate ), Then the situation can be improved , As shown in the figure below :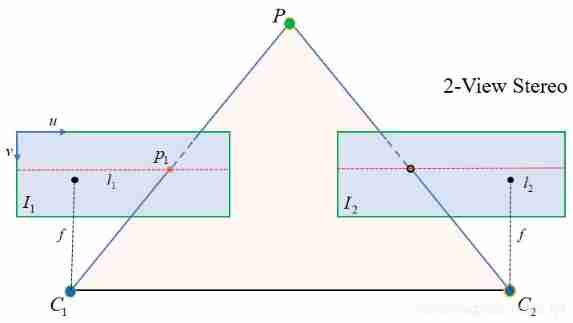
As for the adjustment amount of this main point , It has something to do with your camera design , If you are a two camera stereo system , Then it is suggested that you can follow Fusiello To design internal parameters , But set the width of the image as much as possible larger than the original width , Then visualize the results , Design interactive image clipping , After the clipping range is determined, the new principal point coordinates can be obtained . Because the binocular structure is fixed , So you just need to adjust once , If you don't move the structure, you don't have to adjust it .
That's all for today , If you have any questions, you can leave a message in the message area !
About Fusiello Website of France , You can see Epipolar Rectification. by Andrea
FusielloThe following is a pseudocode provided by the author , It's really simple , There is no need for me to do it again
https://homepages.inf.ed.ac.uk/rbf/CVonline/LOCAL_COPIES/FUSIELLO2/node5.html
Bye, everyone ! Like collection and attention !
边栏推荐
- Guess riddles (8)
- AdaBoost use
- My university
- Halcon snap, get the area and position of coins
- Mengxin summary of LCs (longest identical subsequence) topics
- Codeforces round 684 (Div. 2) e - green shopping (line segment tree)
- Pearson correlation coefficient
- 520 diamond Championship 7-4 7-7 solution
- 【日常訓練--騰訊精選50】557. 反轉字符串中的單詞 III
- Luo Gu p3177 tree coloring [deeply understand the cycle sequence of knapsack on tree]
猜你喜欢

RT-Thread内核快速入门,内核实现与应用开发学习随笔记
Halcon Chinese character recognition
Shift operation of complement

Programming implementation of ROS learning 2 publisher node
Typescript hands-on tutorial, easy to understand

319. Bulb switch
My university
C# LINQ源码分析之Count
Mathematical modeling: factor analysis
Halcon: check of blob analysis_ Blister capsule detection
随机推荐
TF coordinate transformation of common components of ros-9 ROS
Dynamic dimensions required for input: input, but no shapes were provided. Automatically overriding
12. Dynamic link library, DLL
Characteristic Engineering
C#图像差异对比:图像相减(指针法、高速)
OpenFeign
Halcon snap, get the area and position of coins
JS asynchronous error handling
Codeforces round 684 (Div. 2) e - green shopping (line segment tree)
迁移学习和域自适应
多元线性回归(sklearn法)
驾驶证体检医院(114---2 挂对应的医院司机体检)
notepad++
2020 "Lenovo Cup" National College programming online Invitational Competition and the third Shanghai University of technology programming competition
Golang foundation -- map, array and slice store different types of data
Kubedm series-00-overview
我从技术到产品经理的几点体会
编辑器-vi、vim的使用
Numpy pit: after the addition of dimension (n, 1) and dimension (n,) array, the dimension becomes (n, n)
Task failed task_ 1641530057069_ 0002_ m_ 000000