当前位置:网站首页>潘多拉 IOT 开发板学习(RT-Thread)—— 实验1 LED 闪烁实验(学习笔记)
潘多拉 IOT 开发板学习(RT-Thread)—— 实验1 LED 闪烁实验(学习笔记)
2022-07-02 03:36:00 【小辉_Super】
本文代码参考 RT-Thread 官方 BSP
实验功能
例程源码:(main.c)
该实验实现了 LED_R 的闪烁,亮灭间隔为 500 ms。
/* * Copyright (c) 2006-2018, RT-Thread Development Team * * SPDX-License-Identifier: Apache-2.0 * * Change Logs: * Date Author Notes * 2018-08-16 armink first implementation */
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
/* 配置 LED 灯引脚 */
#define LED_PIN PIN_LED_R
int main(void)
{
unsigned int count = 1;
/* 设置 LED 引脚为输出模式 */
rt_pin_mode(LED_PIN, PIN_MODE_OUTPUT);
while (count > 0)
{
/* LED 灯亮 */
rt_pin_write(LED_PIN, PIN_LOW);
LOG_D("led on, count: %d", count);
rt_thread_mdelay(500);
/* LED 灯灭 */
rt_pin_write(LED_PIN, PIN_HIGH);
LOG_D("led off");
rt_thread_mdelay(500);
count++;
}
return 0;
}
代码剖析
rt_pin_mode()
该函数的作用是 GPIO Pin 的初始化,定义为
/* RT-Thread Hardware PIN APIs */
void rt_pin_mode(rt_base_t pin, rt_base_t mode)
{
RT_ASSERT(_hw_pin.ops != RT_NULL);
_hw_pin.ops->pin_mode(&_hw_pin.parent, pin, mode);
}
参数 pin 是一个 rt_base_t 变量(long),下面的 GET_PIN() 是 STM32 的 pin 值宏定义,第一个参数填大写字母,第二个参数填数字。
#define GET_PIN(PORTx,PIN) (rt_base_t)((16 * ( ((rt_base_t)__STM32_PORT(PORTx) - (rt_base_t)GPIOA)/(0x0400UL) )) + PIN)
#define __STM32_PORT(port) GPIO##port // ## 是字符连接符,假如 port 为 A,则表示 GPIOA
例如实验中的
#define PIN_LED_R GET_PIN(E, 7),表示 GPIOE GPIO_Pin7
目前 RT-Thread 支持的引脚工作模式包括:
#define PIN_MODE_OUTPUT 0x00 /* 输出 */
#define PIN_MODE_INPUT 0x01 /* 输入 */
#define PIN_MODE_INPUT_PULLUP 0x02 /* 上拉输入 */
#define PIN_MODE_INPUT_PULLDOWN 0x03 /* 下拉输入 */
#define PIN_MODE_OUTPUT_OD 0x04 /* 开漏输出 */
在 bsp 的 drv_gpio.c 文件中,有底层 GPIO 驱动,下面是 STM32 的 GPIO 模式设置的驱动函数(大家应该很熟悉,就是用 HAL 库写的 GPIO 初始化代码)
static void stm32_pin_mode(rt_device_t dev, rt_base_t pin, rt_base_t mode)
{
const struct pin_index *index;
GPIO_InitTypeDef GPIO_InitStruct;
index = get_pin(pin);
if (index == RT_NULL)
{
return;
}
/* Configure GPIO_InitStructure */
GPIO_InitStruct.Pin = index->pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
if (mode == PIN_MODE_OUTPUT)
{
/* output setting */
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
}
else if (mode == PIN_MODE_INPUT)
{
/* input setting: not pull. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
}
else if (mode == PIN_MODE_INPUT_PULLUP)
{
/* input setting: pull up. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
}
else if (mode == PIN_MODE_INPUT_PULLDOWN)
{
/* input setting: pull down. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
}
else if (mode == PIN_MODE_OUTPUT_OD)
{
/* output setting: od. */
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
}
HAL_GPIO_Init(index->gpio, &GPIO_InitStruct);
}
rt_pin_write()
GPIO 写函数,下面是函数的定义,
void rt_pin_write(rt_base_t pin, rt_base_t value)
{
RT_ASSERT(_hw_pin.ops != RT_NULL);
_hw_pin.ops->pin_write(&_hw_pin.parent, pin, value);
}
和 GPIO 模式配置函数类似,它其实也会调用底层驱动里对应的函数,该底层函数是通过 HAL_GPIO_WritePin() 来完成 GPIO Pin 的修改。
static void stm32_pin_write(rt_device_t dev, rt_base_t pin, rt_base_t value)
{
const struct pin_index *index;
index = get_pin(pin);
if (index == RT_NULL)
{
return;
}
HAL_GPIO_WritePin(index->gpio, index->pin, (GPIO_PinState)value);
}
rt_thread_mdelay()
这是 RT-Thread 的毫秒级延时函数,定义如下:
rt_err_t rt_thread_mdelay(rt_int32_t ms)
{
rt_tick_t tick;
// 获取需要的时钟节拍
tick = rt_tick_from_millisecond(ms);
// 阻塞相应的节拍时间
return rt_thread_sleep(tick);
}
rt_tick_from_millisecond()
/** * 算出 ms 对应的时钟节拍数 * * * @param ms the specified millisecond * - Negative Number wait forever * - Zero not wait * - Max 0x7fffffff * * @return the calculated tick */
rt_tick_t rt_tick_from_millisecond(rt_int32_t ms)
{
rt_tick_t tick;
if (ms < 0)
{
tick = (rt_tick_t)RT_WAITING_FOREVER; // -1
}
else
{
// 将“每秒节拍数” / 1000 * ms,算出对应的秒节拍数
tick = RT_TICK_PER_SECOND * (ms / 1000);
// 加上小于 1000ms 部分的节拍数
tick += (RT_TICK_PER_SECOND * (ms % 1000) + 999) / 1000;
}
/* return the calculated tick */
return tick;
}
rt_thread_sleep()
线程睡眠(挂起)函数,参数是系统节拍数:
/** * 该函数能让当前线程挂起一段时间(由 tick 决定) * * @param tick the sleep ticks * * @return RT_EOK */
rt_err_t rt_thread_sleep(rt_tick_t tick)
{
register rt_base_t temp;
struct rt_thread *thread;
/* set to current thread */
thread = rt_thread_self();
RT_ASSERT(thread != RT_NULL);
RT_ASSERT(rt_object_get_type((rt_object_t)thread) == RT_Object_Class_Thread);
/* disable interrupt */
temp = rt_hw_interrupt_disable();
/* suspend thread */
rt_thread_suspend(thread);
/* reset the timeout of thread timer and start it */
rt_timer_control(&(thread->thread_timer), RT_TIMER_CTRL_SET_TIME, &tick);
rt_timer_start(&(thread->thread_timer));
/* enable interrupt */
rt_hw_interrupt_enable(temp);
rt_schedule();
/* clear error number of this thread to RT_EOK */
if (thread->error == -RT_ETIMEOUT)
thread->error = RT_EOK;
return RT_EOK;
}
LOG_D()
本实验中,我们可以将 LOG_D() 视为 rt_kprintf(),
#define dbg_log_line(lvl, color_n, fmt, ...) \ do \ {
\ _DBG_LOG_HDR(lvl, color_n); \ rt_kprintf(fmt, ##__VA_ARGS__); \ _DBG_LOG_X_END; \ } \ while (0)
LOG_D 是 RT-Thread 内核里的一个日志打印函数,详情可见:《RT-Thread 文档中心——ulog 日志》
RT-Thread 的日志 API 包括:

边栏推荐
- Kotlin基础学习 14
- VS2010 plug-in nuget
- Intersection of Venn graph
- VS2010插件NuGet
- Class design basis and advanced
- Network connection mode of QT
- 蓝桥杯单片机省赛第七届
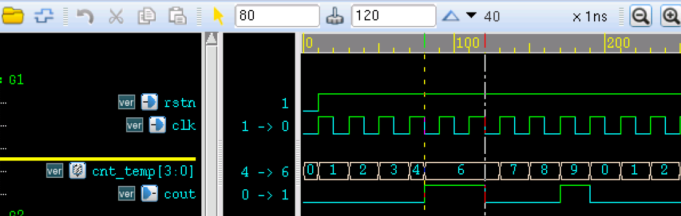
- Verilog state machine
- Global and Chinese markets for welding equipment and consumables 2022-2028: Research Report on technology, participants, trends, market size and share
- Verilog reg register, vector, integer, real, time register
猜你喜欢
MD5 of Oracle
Continuous assignment of Verilog procedure
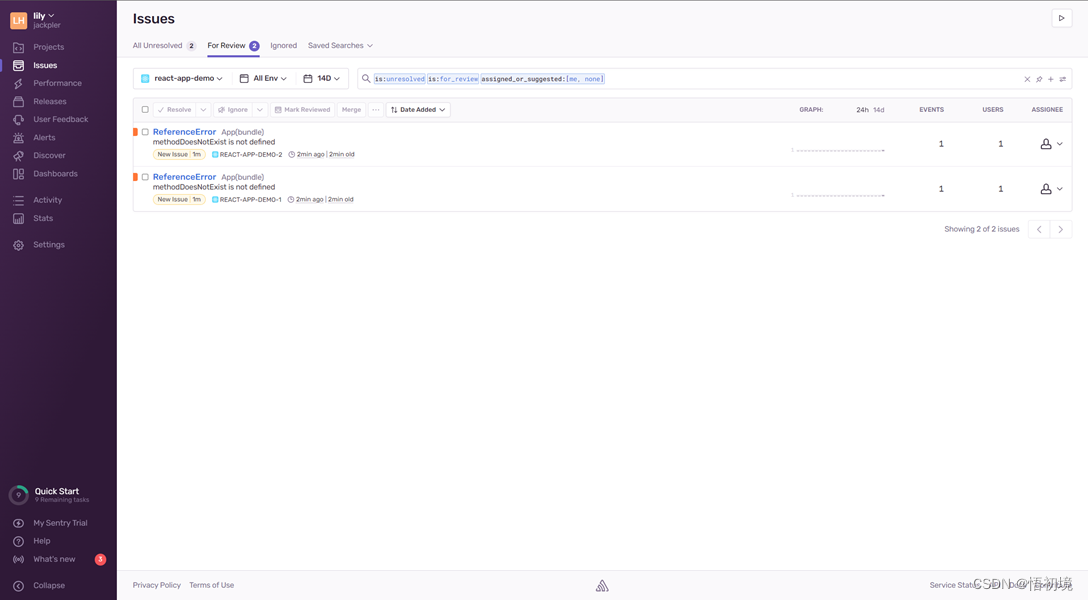
初出茅庐市值1亿美金的监控产品Sentry体验与架构
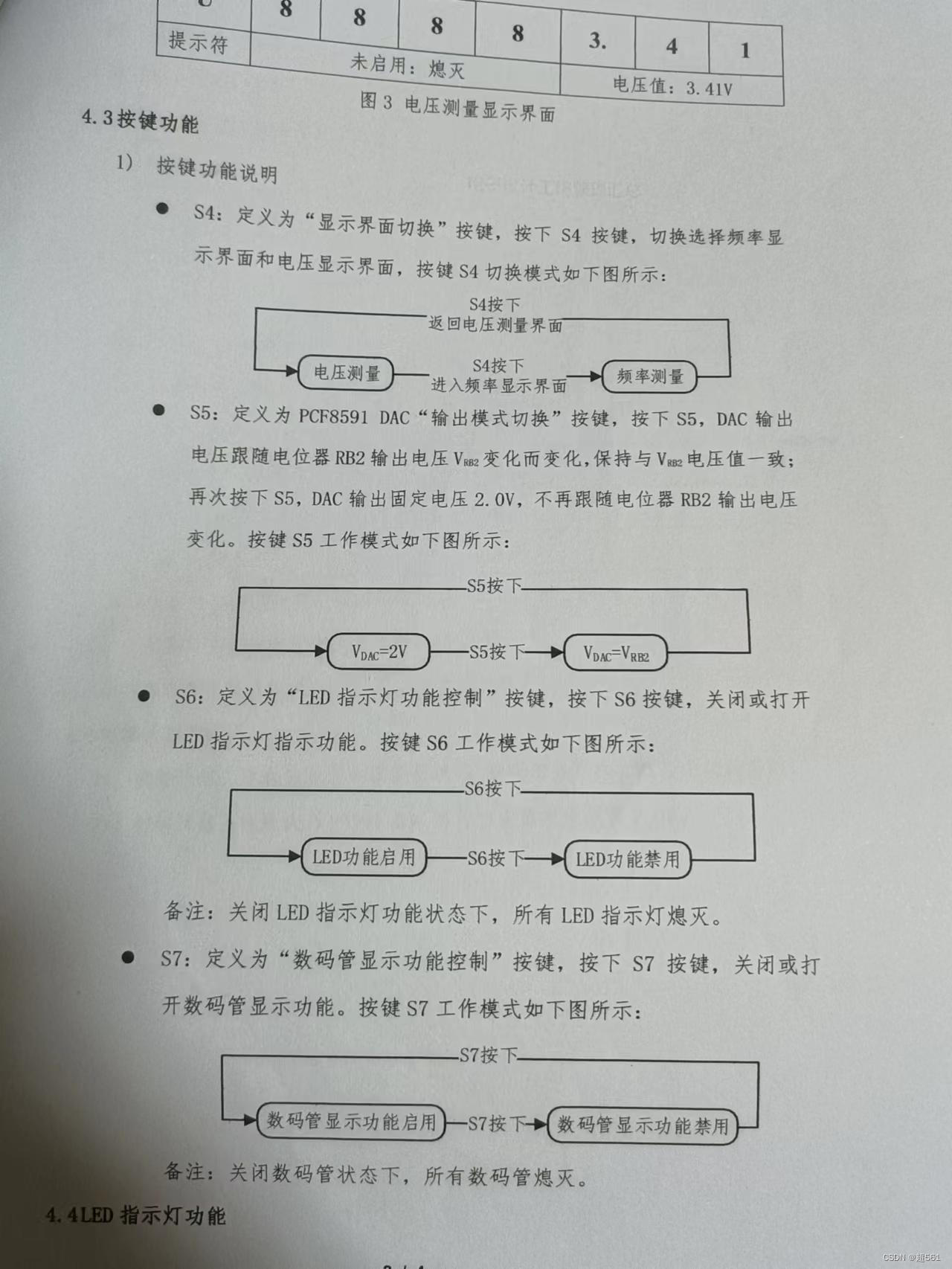
蓝桥杯单片机省赛第十届
Detailed explanation of the difference between Verilog process assignment
![[HCIA continuous update] working principle of OSPF Protocol](/img/bc/4eeb091c511fd563fb1e00c8c8881a.jpg)
[HCIA continuous update] working principle of OSPF Protocol
![[mv-3d] - multi view 3D target detection network](/img/aa/741b36ead2dfaa5a165401b8d657b7.jpg)
[mv-3d] - multi view 3D target detection network

Failed to upgrade schema, error: “file does not exist

焱融看 | 混合云时代下,如何制定多云策略

Verilog timing control
随机推荐
蓝桥杯单片机省赛第五届
Uniapp uses canvas to generate posters and save them locally
Yan Rong looks at how to formulate a multi cloud strategy in the era of hybrid cloud
C # joint Halcon's experience of breaking away from Halcon environment and various error reporting solutions
蓝桥杯单片机省赛第十二届第二场
初出茅庐市值1亿美金的监控产品Sentry体验与架构
Grpc快速实践
[designmode] Prototype Pattern
Account management of MySQL
Exchange rate query interface
Global and Chinese markets for hand hygiene monitoring systems 2022-2028: Research Report on technology, participants, trends, market size and share
Work hard all day long and be alert at sunset
ORA-01547、ORA-01194、ORA-01110
汇率的查询接口
Gradle foundation | customize the plug-in and upload it to jitpack
Detailed explanation of the difference between Verilog process assignment
h5中的页面显示隐藏执行事件
Oracle viewing locked tables and unlocking
Halcon image rectification
Pointer array & array pointer