当前位置:网站首页>MongoDB Compass 安装与使用
MongoDB Compass 安装与使用
2022-08-02 14:03:00 【lu_shang】
一款mongoDb可视化工具,用于在可视化环境中查询、聚合和分析 MongoDB 数据。
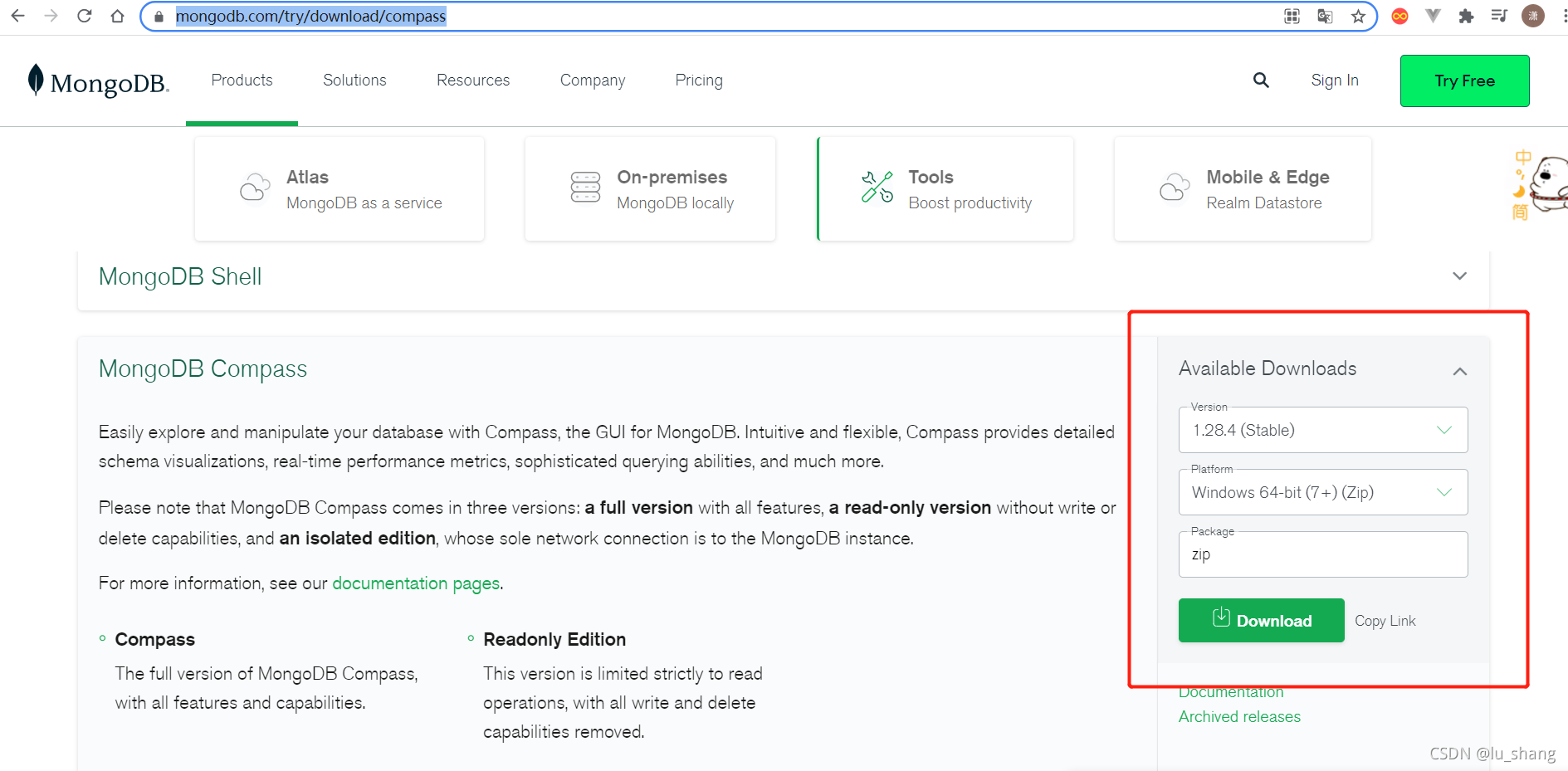
下载地址https://www.mongodb.com/try/download/compass https://www.mongodb.com/try/download/compass
https://www.mongodb.com/try/download/compass
 https://www.mongodb.com/try/download/compass
https://www.mongodb.com/try/download/compass1、下载安装
选择对应安装,可选择zip包直接下载
(mongo官方下载资源会很慢,这里可借助Internet Download Manager下载工具,速度起飞哦)
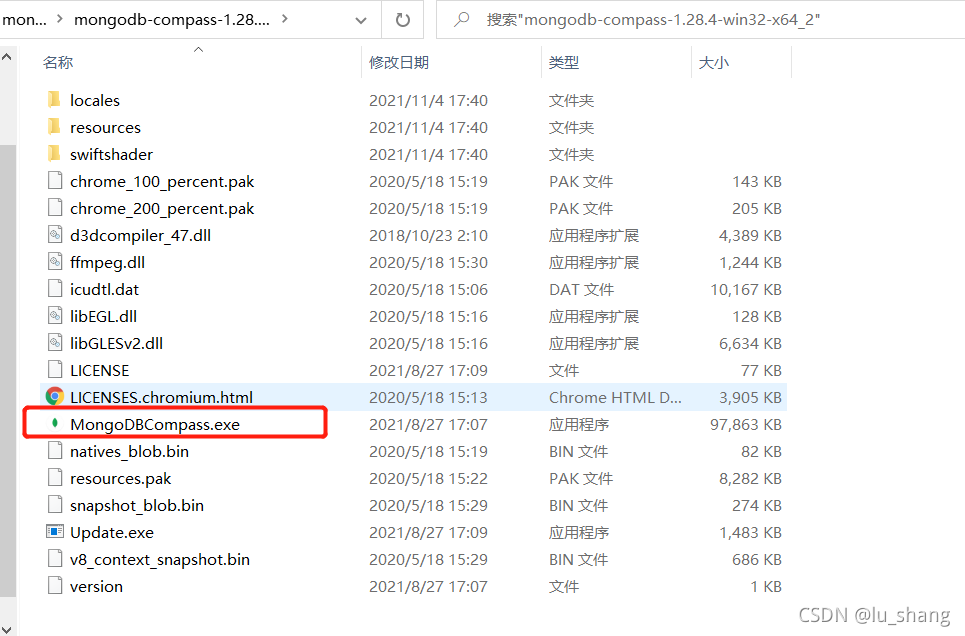
2、下载完成进行解压缩
3、双击启动MongoDBCompass.exe
4、连接mongo数据库
(1)初次使用可直接点击Connect默认连接
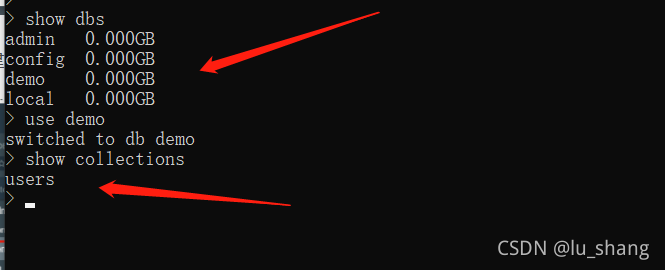
默认会连mongo27017端口,连接后查看本地已有库表。
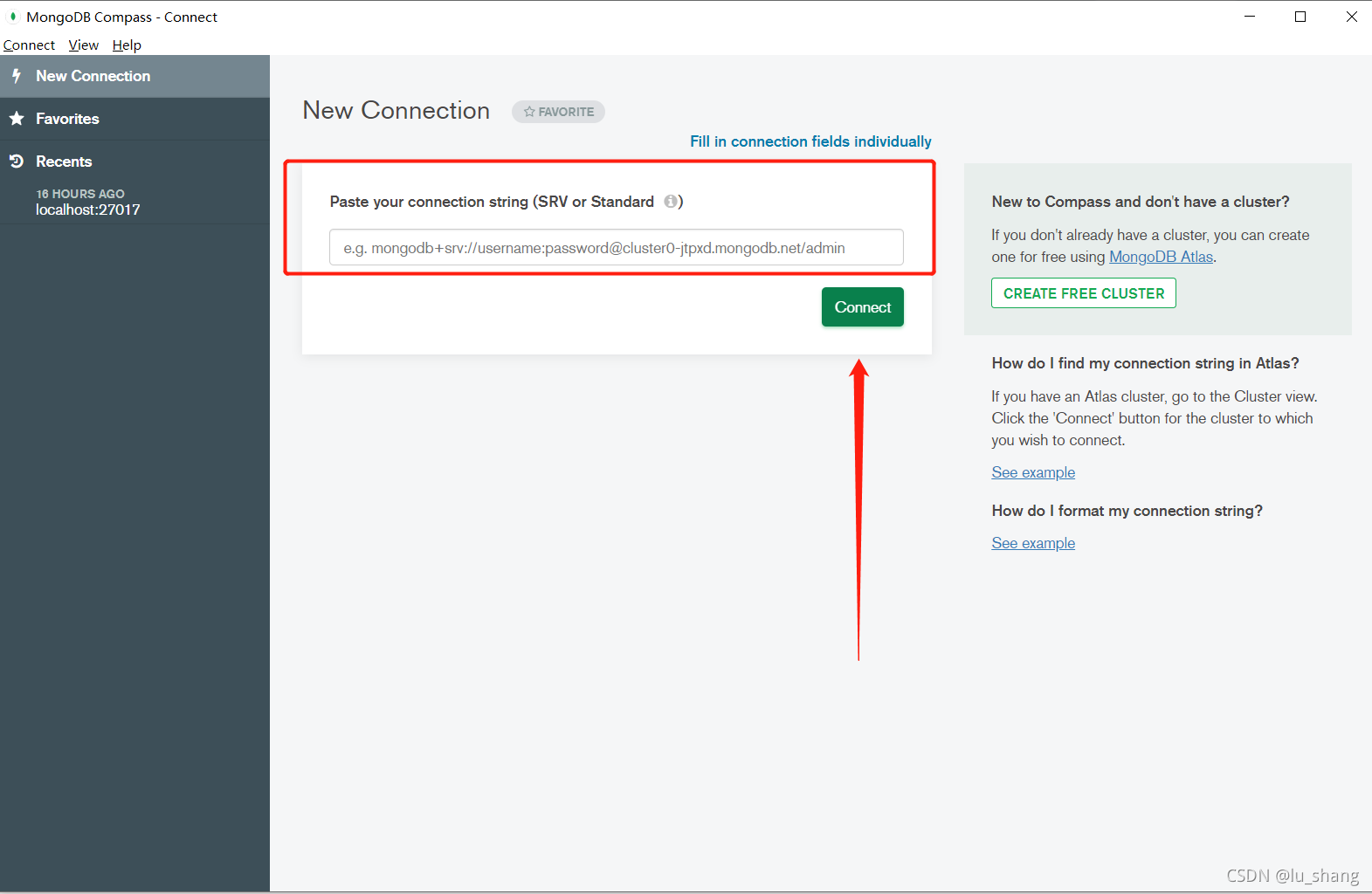
(2)也可以输入mongodb://+ip:post进行连接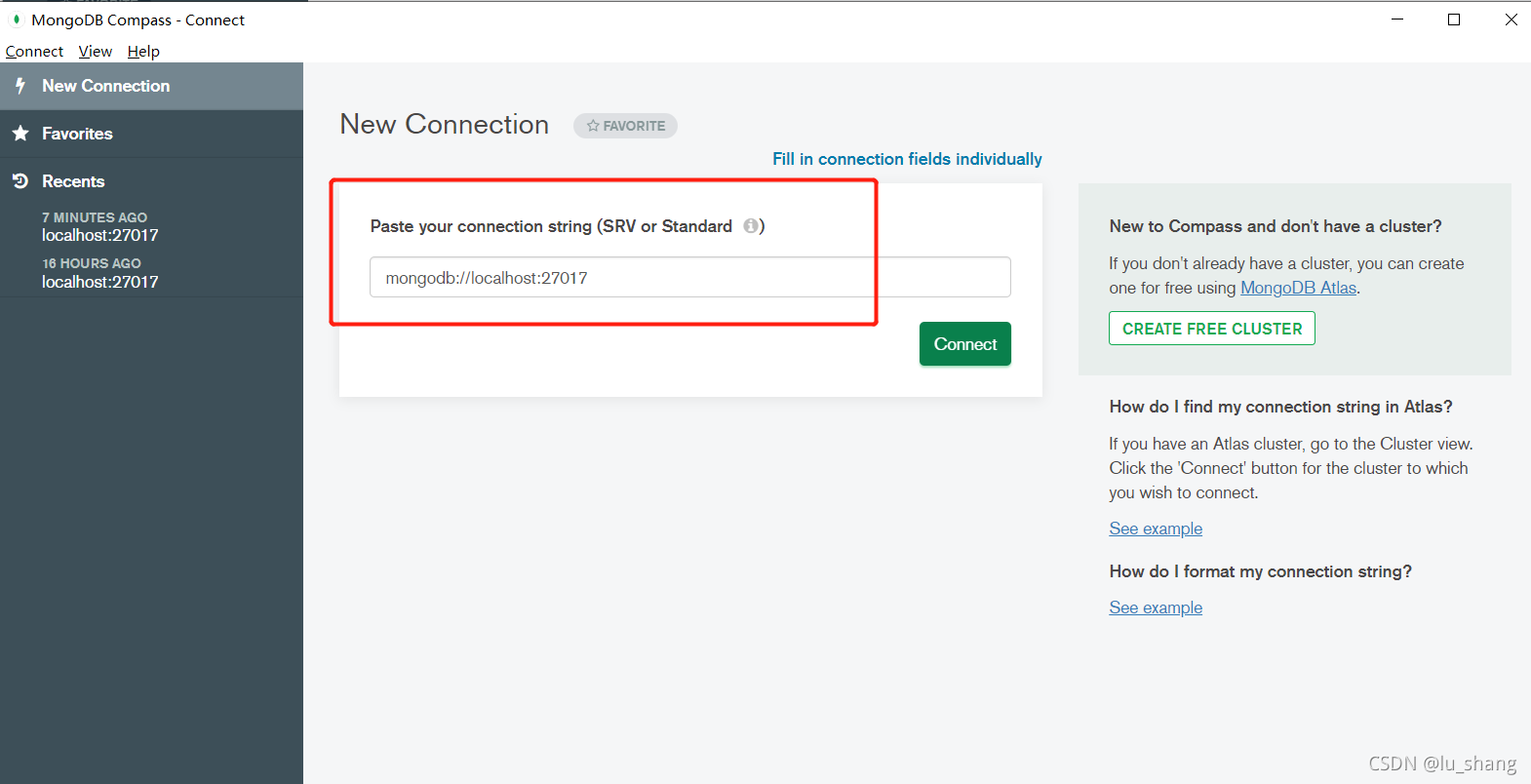
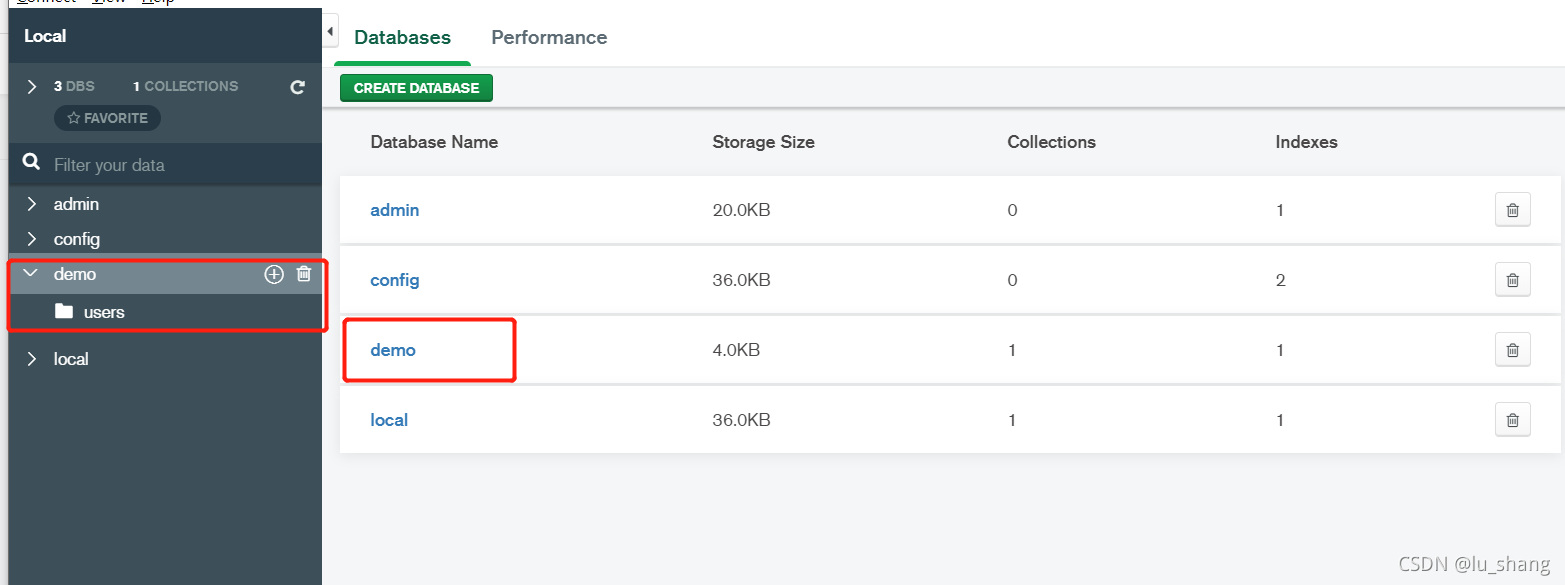
连接成功后进入如下图,左侧为database数据库列表,右侧为database的存储大小、collection数量以及index数量等信息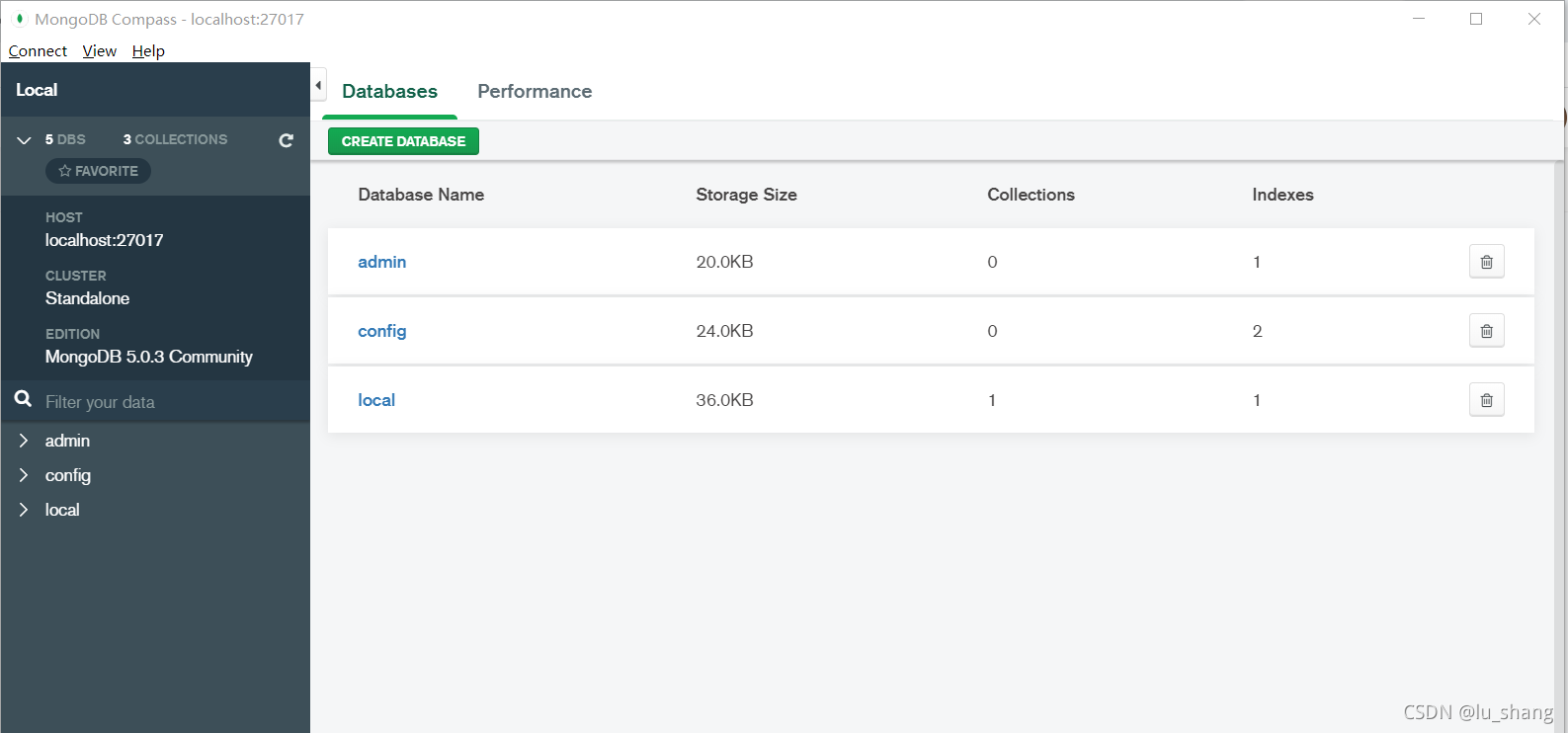
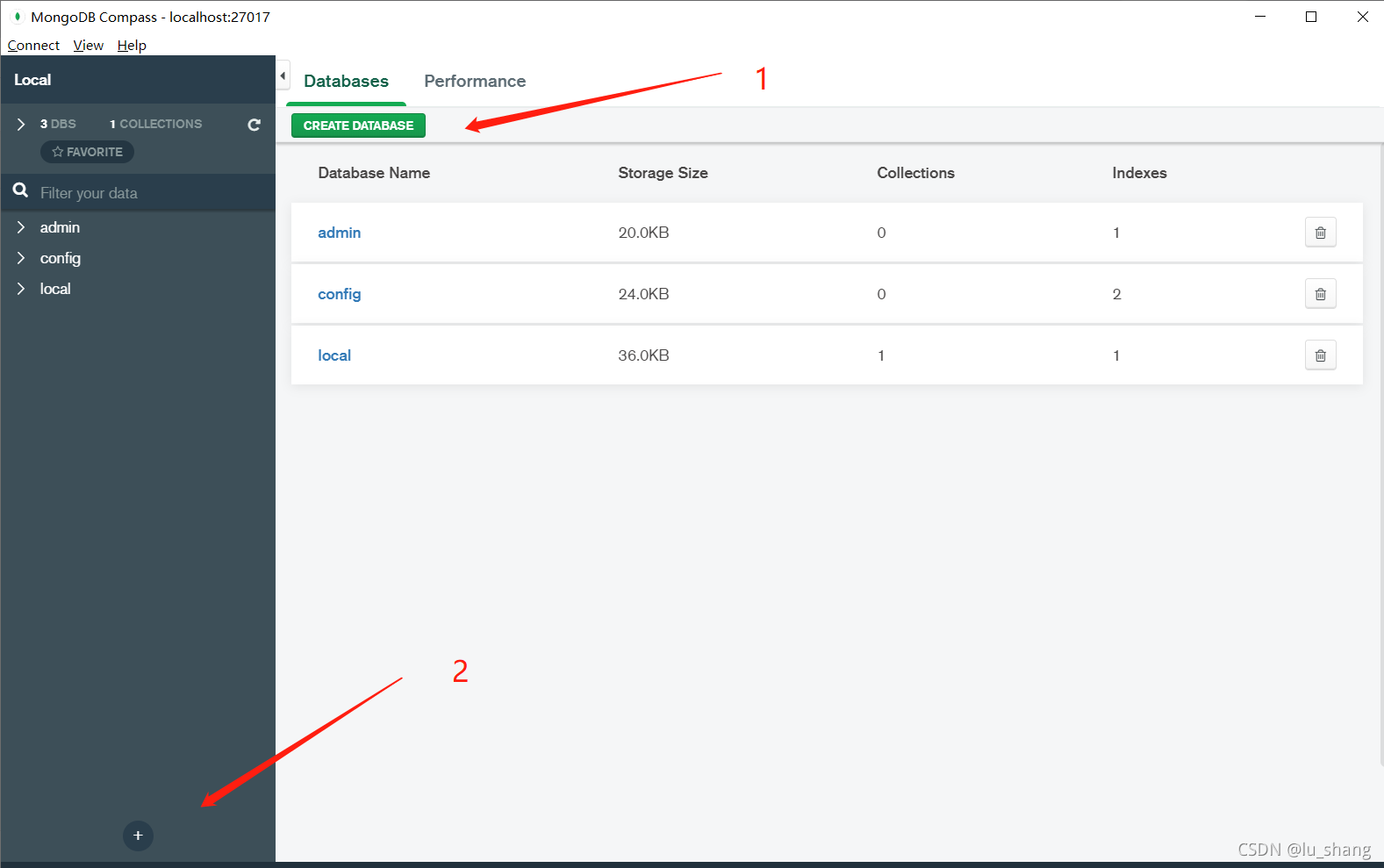
5、创建新database数据库和collection集合
点击左侧侧边栏底部加号或右侧CREATE DATABASE按钮进行创建
创建数据库时需要先创建一个集合
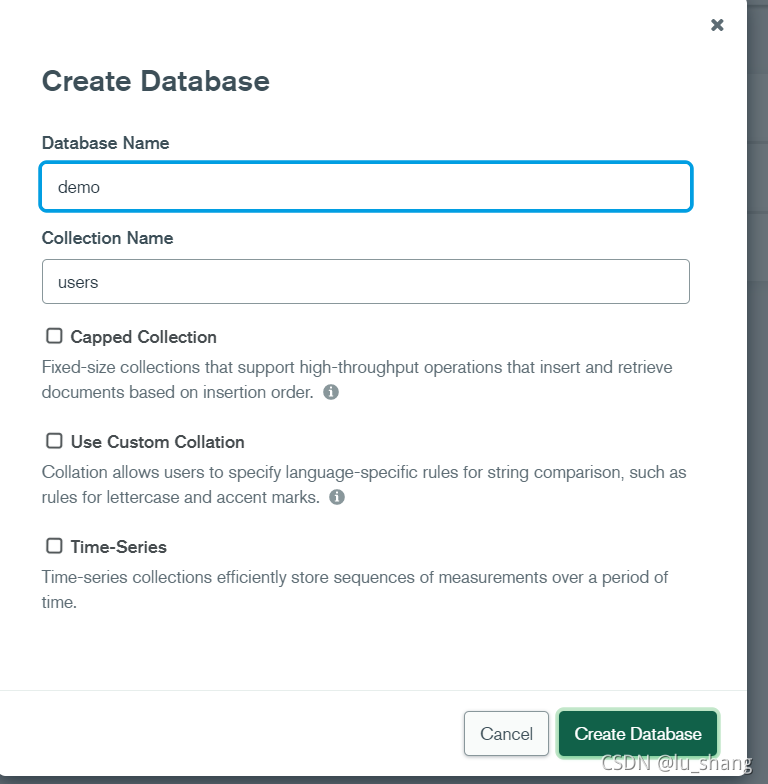
创建完成如图:
6、向集合文档插入新数据
点击面板ADD DATA(可选择导入文件或插入文档数据)
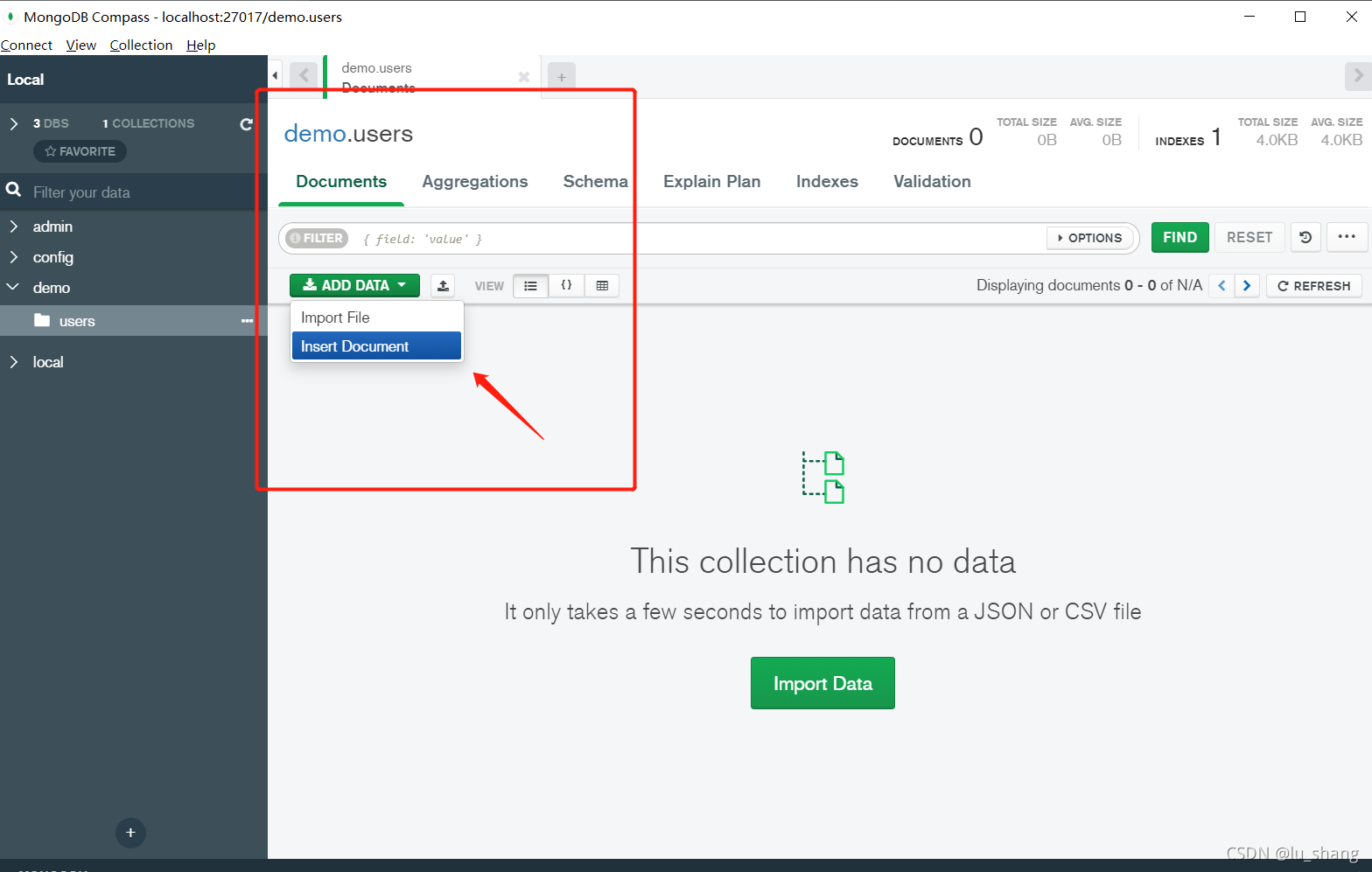
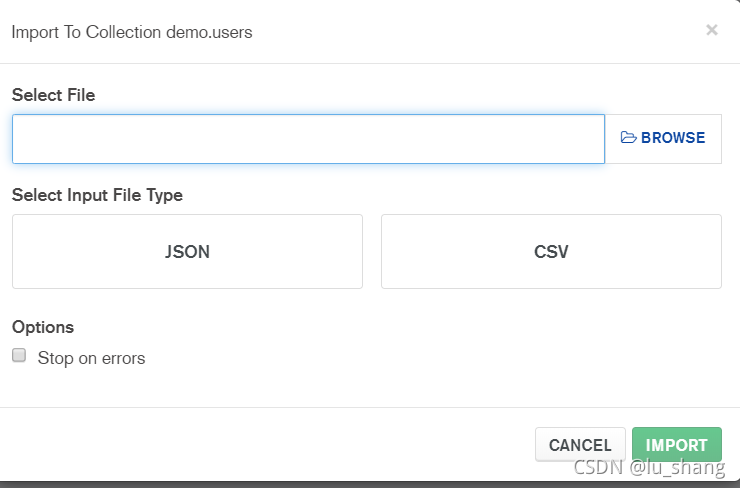
(1)导入文件可选择json或csv文件导入
(2)insert document插入文档数据支持json写入或list列表写入
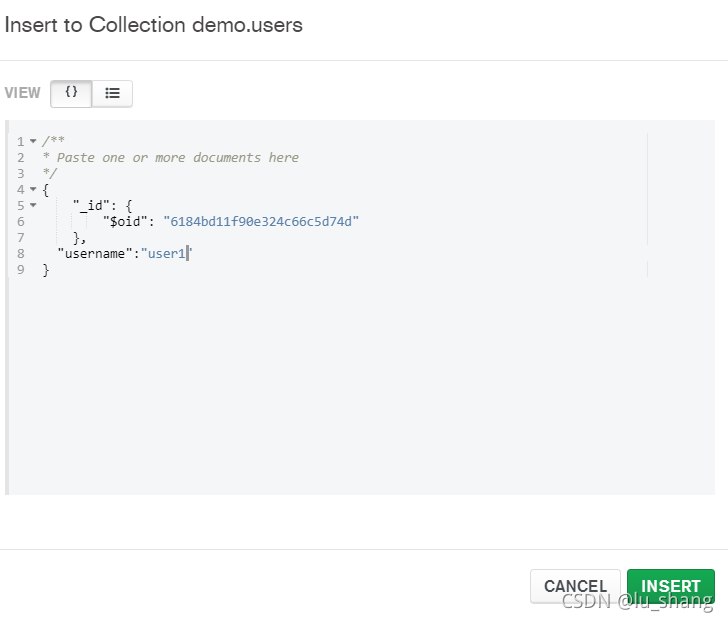
使用list方式可设置字段类型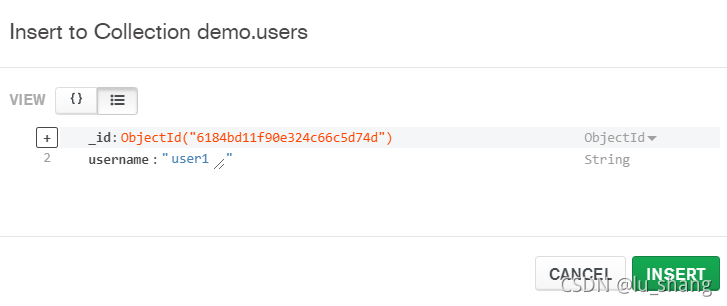
7、插入成功后如图


8、执行文档查询
在FILTER行输入查询条件后,点击FIND,即可执行查询。
边栏推荐
- 编程规范——LiteOS
- Unit 7 ORM table relationships and operations
- Unit 4 Routing Layer
- YOLOv7使用云GPU训练自己的数据集
- Unit 14 Viewsets and Routing
- Flask请求应用上下文源码分析
- chapter7
- The 2nd China Rust Developers Conference (RustChinaConf 2021~2022) Online Conference Officially Opens Registration
- drf视图组件
- Implementation of redis distributed lock and watchdog
猜你喜欢
![[ROS] (06) ROS Communication - Topic Communication](/img/21/d79f2c4e246eb9ea39df9c7435bb36.png)

随机推荐
The specific operation process of cloud GPU (Hengyuan cloud) training
jwt (json web token)
C语言初级—水仙花数
PHP版本切换:5.x到7.3
Unit 8 Middleware
Unit 3 view layer
第三单元 视图层
C语言——断言assert的使用
猜数字游戏,猜错10次关机(srand、rand、time)随机数生成三板斧(详细讲解!不懂问我!)
Flask项目的完整创建 七牛云与容联云
Network pruning (1)
线性代数期末复习存档
Raj delivery notes - separation 第08 speak, speaking, reading and writing
Flask框架深入一
STM32(F407)—— 堆栈
window10下半自动标注
C语言字符串——关于指针
STM32 (F407) - stack
(ROS) (03) CMakeLists. TXT, rounding
初识c语言指针