当前位置:网站首页>Visual Studio配置OpenCV之后,提示:#include<opencv2/opencv.hpp>无法打开源文件
Visual Studio配置OpenCV之后,提示:#include<opencv2/opencv.hpp>无法打开源文件
2022-08-02 14:02:00 【程序猫 猫小白】
问题描述
昨天按照博客[OpenCV配置](https://blog.csdn.net/mars_xiaolei/article/details/78759041),给VS2017配置OpenCV,配置之后写了个简单的demo:
错误提示:#include<opencv2/opencv.hpp>无法打开源文件。
通过几次折腾,最后终于配置成功。现在把配置过程中碰到的坑记录一下。
第一个坑
需要添加三个“包含目录”:(打开VS2017,新建一个C++项目,在Visual Studio左上角菜单栏,依次选择“视图”、“其他窗口”、“属性管理器”。找到自己对应的Debug和Release模式:右击–>属性–.>通用属性–>VC++目录—>包含目录–>右边的编辑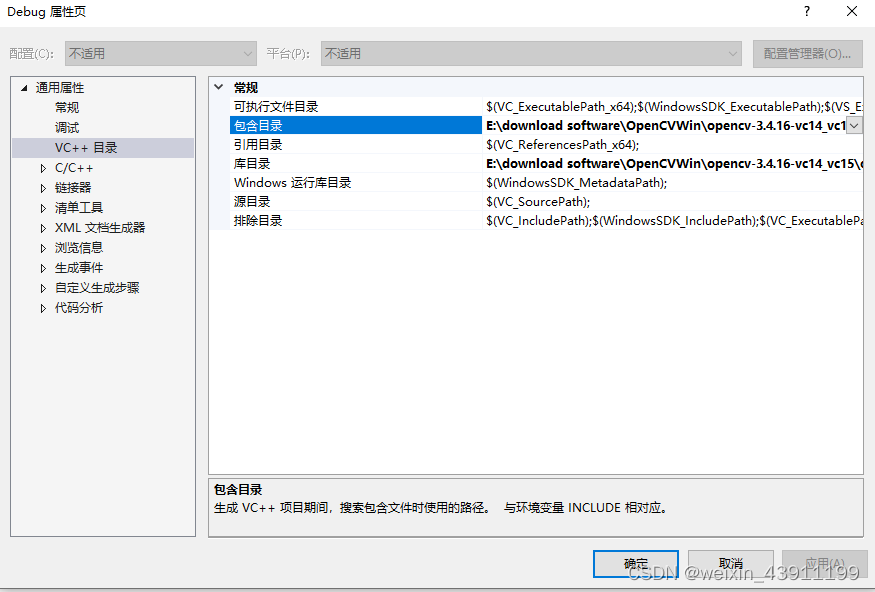
加入如下目录路径:
E:\download software\OpenCVWin\opencv-3.4.16-vc14_vc15\opencv\build\include
E:\download software\OpenCVWin\opencv-3.4.16-vc14_vc15\opencv\build\include\opencv
E:\download software\OpenCVWin\opencv-3.4.16-vc14_vc15\opencv\build\include\opencv2
错误:
把三个目录写成一行,目录之前用空格分开
正确做法:
三个目录之间需要换行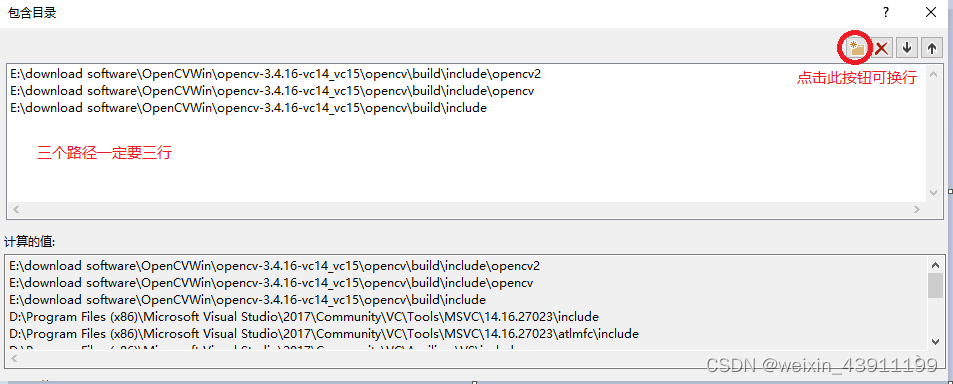
第二个坑
添加库目录:链接器–>输入–>附件依赖项–>右边编辑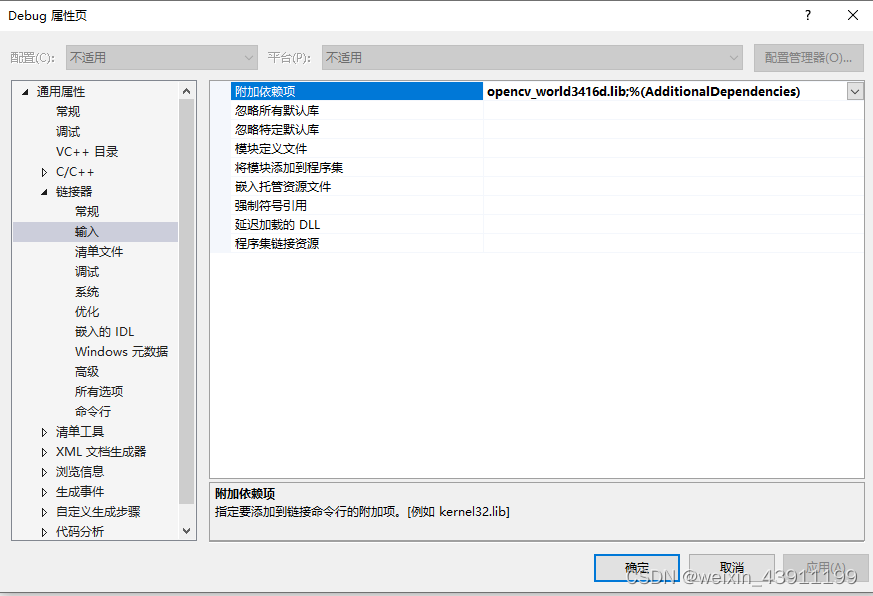
错误做法:
添加库目录,opencv有两个目录路径vc14和vc15:
E:\download software\OpenCVWin\opencv-3.4.16-vc14_vc15\opencv\build\x64\vc14\lib
E:\download software\OpenCVWin\opencv-3.4.16-vc14_vc15\opencv\build\x64\vc15\lib
当时随手选择的是vc14路径
正确做法:
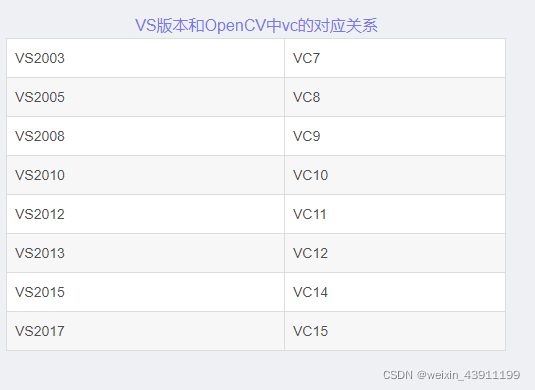
因此要选择VC15的路径: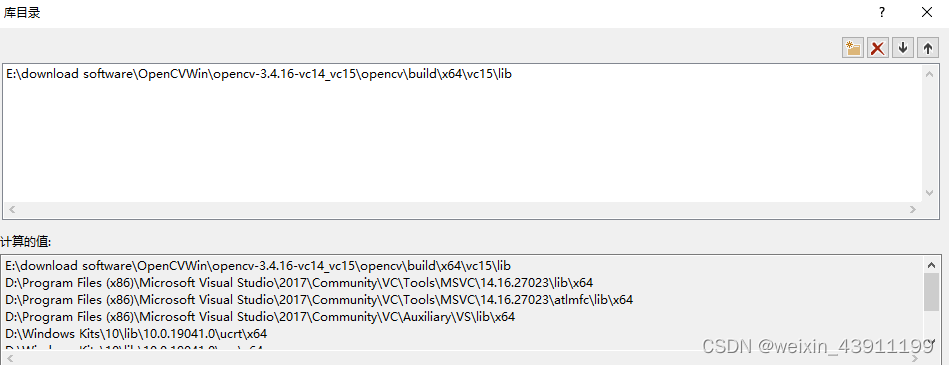
第三个坑
错误做法:Debug后面默认值是x86,没有做任何修改
正确做法:选择x64的值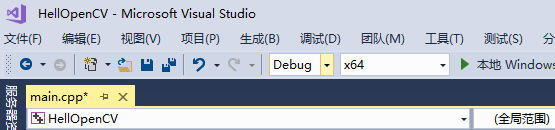
写在最后的话
如果按照[OpenCV配置](https://blog.csdn.net/mars_xiaolei/article/details/78759041)一次通过,没碰到坑,那就恭喜了;如果配置的过程中遇到其他的坑,欢迎交流~~~
今天第一次写博客记录,有时间的话多记录记录,自己以后也可以看看~~
边栏推荐
- Raft对比ZAB协议
- [ROS] The software package of the industrial computer does not compile
- Chapter6 visualization (don't want to see the version)
- Error Correction Design Principle of Hamming Check Code
- 第十二单元 关联序列化处理
- 编程规范——LiteOS
- AWVS工具介绍[通俗易懂]
- 8580 合并链表
- Some impressions of the 519 plummet 2021-05-21
- Hands-on OCR (1)
猜你喜欢
What are the file encryption software?Keep your files safe
Shell脚本完成pxe装机配置

Sentinel源码(四)(滑动窗口流量统计)
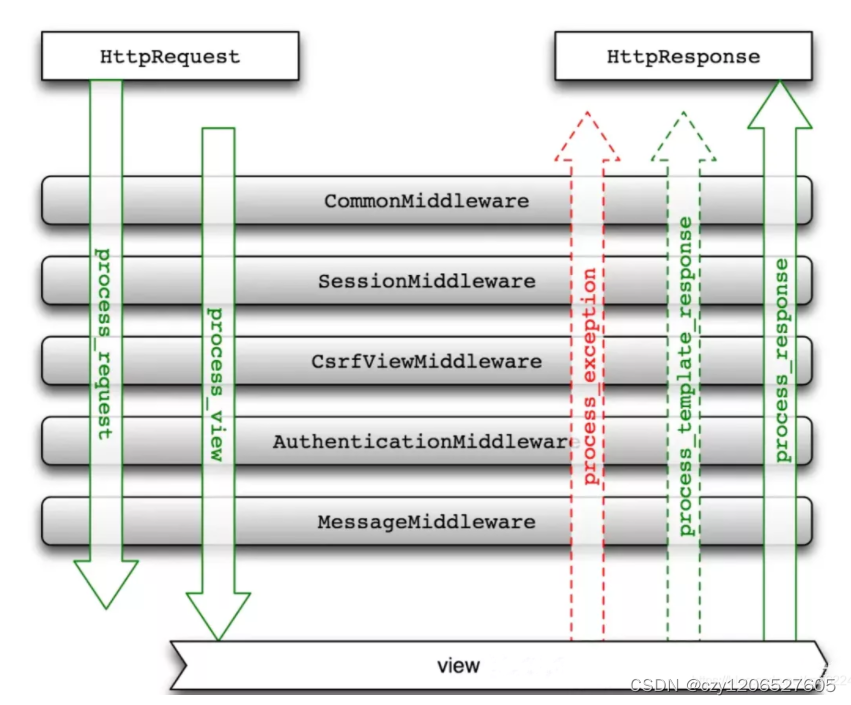
Unit 8 Middleware
Raft协议图解,缺陷以及优化

Building and getting started with the Flask framework
创建ROS工作空间](/img/2a/11e5023ef6d052d98b4090d2eea017.png)
[ROS](01)创建ROS工作空间

ZABBIX配置邮件报警和微信报警

The specific operation process of cloud GPU (Hengyuan cloud) training
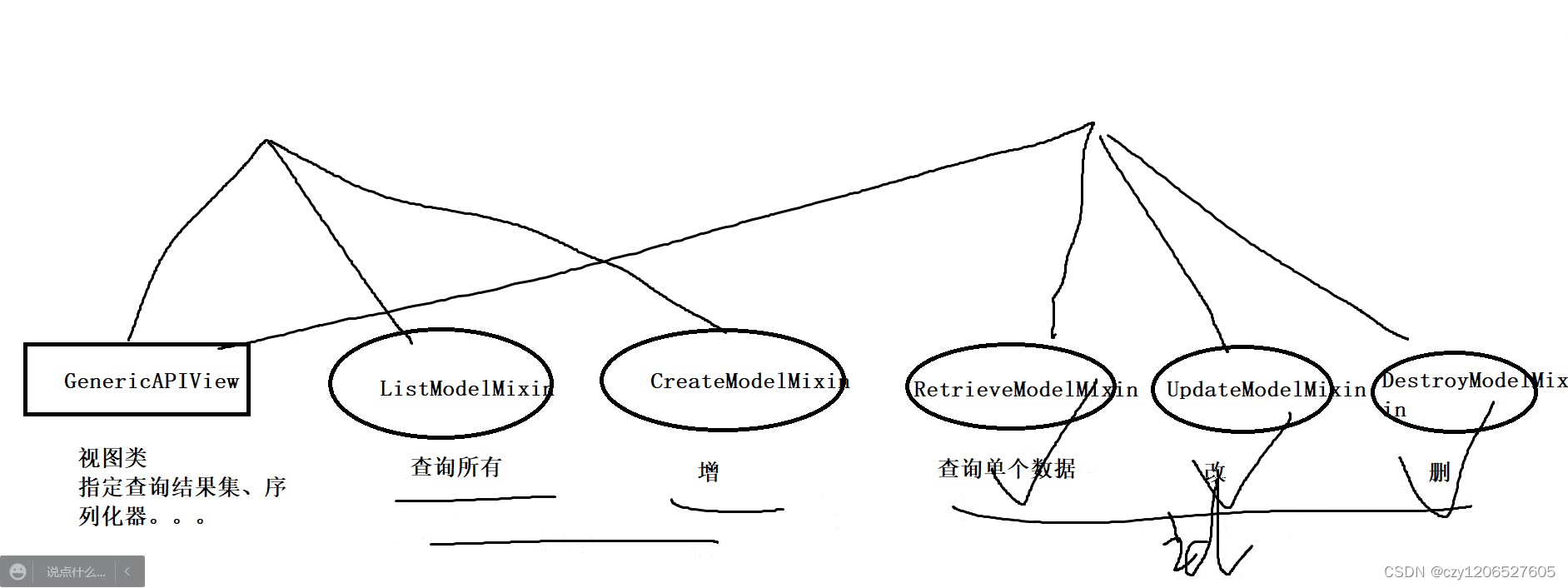
Unit 13 Mixing in View Base Classes
随机推荐
第七单元 ORM表关系及操作
Deep learning framework pytorch rapid development and actual combat chapter3
yolov5改进(一) 添加注意力集中机制
动态刷新日志级别
The language of initial
第三单元 视图层
一维卷积神经网络_卷积神经网络的基础知识「建议收藏」
Some impressions of the 519 plummet 2021-05-21
【VCU】详解S19文件(S-record)
WeChat Mini Program-Recent Dynamic Scrolling Implementation
第十五单元 分页、过滤
Supervision strikes again, what about the market outlook?2021-05-22
Sentinel源码(四)(滑动窗口流量统计)
Error Correction Design Principle of Hamming Check Code
redis分布式锁和看门狗的实现
MySQL数据库语法格式
第十一单元 序列化器
IDEA打包jar包
yolov5 improvement (1) Add attention focus mechanism
Raft对比ZAB协议