当前位置:网站首页>PSINS中19维组合导航模块sinsgps详解(时间同步部分)
PSINS中19维组合导航模块sinsgps详解(时间同步部分)
2022-07-06 19:13:00 【python小白(下阶段小黑)】
时间同步部分
时间不同步误差原理
参见图7.3.2,在惯性/卫星组合导航系统中,组合导航计算机获得两类传感器导航信息的时刻往往不是传感器实际信息的采集时刻(A和B),从传感器信息采集到组合导航计算之间存在一定的时间滞后﹐比如卫星接收机采集到无线电信号后﹐需要先进行一系列的解算,再经过通信端口发送给组合导航计算机。惯性和卫星两类传感器的时间滞后一般并不相同,两者之间的相对滞后记为时间不同步误差delta t。在组合导航信息比对时,必须对时间不同步误差进行估计或补偿。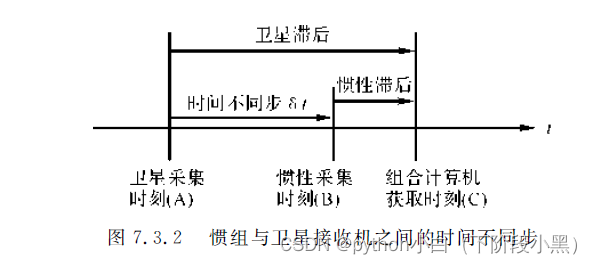
在分析时间不同步误差时,假设惯导与卫导之间的杆臂误差已经得到校正。如图7.3.2所示,惯导速度和卫星速度之间的关系应为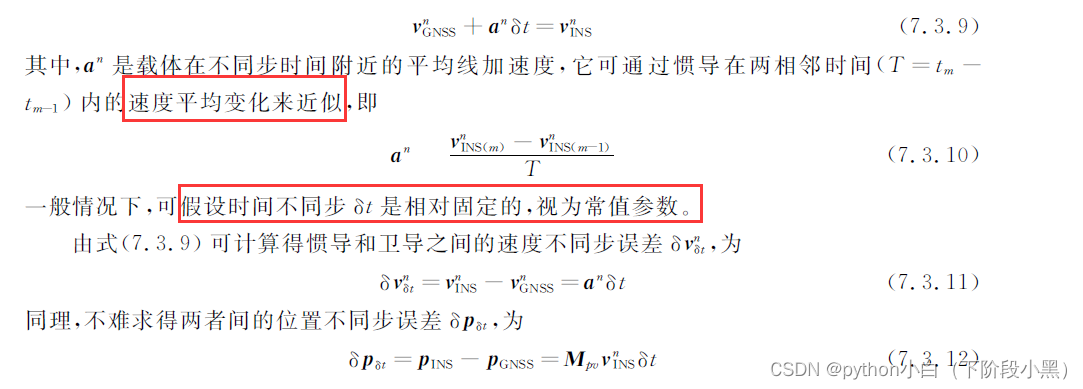
时间不同步误差代码
function [kgps, dt] = imugpssyn(k0, k1, ForB)
% SIMU & GPS time synchronization. A schematic diagram for time
% relationship between SIMU & GPS looks like
% k0 k1
% imu_t: -----|------*---|-----|--------
% <---dt---> (Forward)
% <--dt--> (Backward)
% gps_t: ------------|------------------
% kgps
% where k0,k1 for SIMU data log index and kgps for GPS data log index.
%
% Prototype: [kgps, dt] = imugpssyn(k0, k1, ForB)
% Usages:
% For initialization: imugpssyn(imut, gpst)
% where imut is SIMU time array, gpst is GPS time array
% For synchrony checking: [kgps, dt] = imugpssyn(k0, k1, ForB)
% It checks if there is any GPS sample between SIMU time interval
% imut(k0) and imut(k1), if exists, return the GPS index 'kgps'
% and time gap 'dt'.
% ForB='F' for forward checking,
% ForB='B' for backward checking,
% ForB='f' for re-setting from the first one,
% ForB='b' for re-setting from the last one.
%
% See also insupdate, kfupdate, POSProcessing, combinedata, combinet, igsplot.
% Copyright(c) 2009-2014, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 03/02/2014
global igaln
if nargin==2 % initialization: imugpsaln(imut, gpst)
igaln.imut = k0; igaln.gpst = k1;
igaln.glen = length(igaln.gpst);
igaln.kgps = 1;
return;
end
k0 = k0-1;
if k0==0, k0 = 1; end
t0 = igaln.imut(k0); t1 = igaln.imut(k1);
kgps = 0; dt = 0;
if ForB=='F' % Forward search
while igaln.gpst(igaln.kgps)<t0
igaln.kgps = igaln.kgps + 1;
if igaln.kgps>igaln.glen
igaln.kgps = igaln.glen;
break;
end
end
tg = igaln.gpst(igaln.kgps);
if t0<tg && tg<=t1
kgps = igaln.kgps; dt = t1 - tg;
end
elseif ForB=='B' % Backward search
while igaln.gpst(igaln.kgps)>t1
igaln.kgps = igaln.kgps - 1;
if igaln.kgps==0
igaln.kgps = 1;
break;
end
end
tg = igaln.gpst(igaln.kgps);
if t0<=tg && tg<t1
kgps = igaln.kgps; dt = tg - t0;
end
elseif ForB=='f' % Forward re-intialization, set to the first one
igaln.kgps = 1;
elseif ForB=='b' % Backward re-intialization, set to the last one
igaln.kgps = igaln.glen;
end
时间不同步初始化
1.imugpssyn(imu(:,end), gps(:,end));为时间不同步的参数初始化模块,即将imu和gps的时间赋值给全局变量
2. [kgps, dt] = imugpssyn(k, k1, 'F');后续代码中的这个代码块,就是找gps的时间在imu的两个时刻中间的情况:imu时间分别为t0,t1;gps时间为tg;若t0<tg<t1,则dT=t1-tg;
边栏推荐
- Cloud Mail . NET Edition
- The cities research center of New York University recruits master of science and postdoctoral students
- Common fitting models and application methods of PCL
- NuScenes数据集关于Radar数据的统计
- 从零安装Redis
- 普通测试年薪15w,测试开发年薪30w+,二者差距在哪?
- Software testing -- common assertions of JMeter interface testing
- 3 -- Xintang nuc980 kernel supports JFFS2, JFFS2 file system production, kernel mount JFFS2, uboot network port settings, and uboot supports TFTP
- Redis入门完整教程:RDB持久化
- The panel floating with the mouse in unity can adapt to the size of text content
猜你喜欢
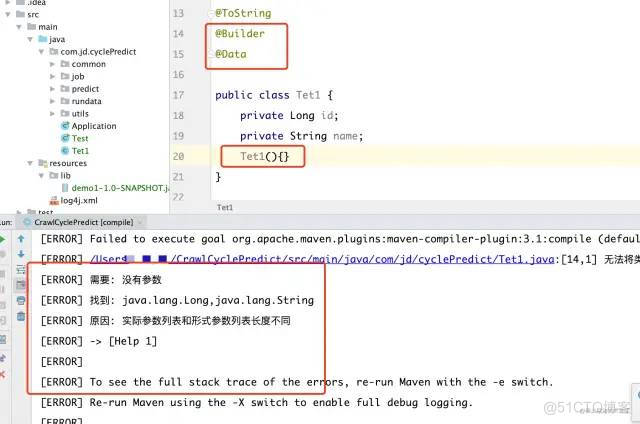
Lombok makes the pit of ⽤ @data and @builder at the same time

巴比特 | 元宇宙每日必读:IP授权是NFT的破圈之路吗?它的难点在哪里?Holder该如何选择合作平台?...
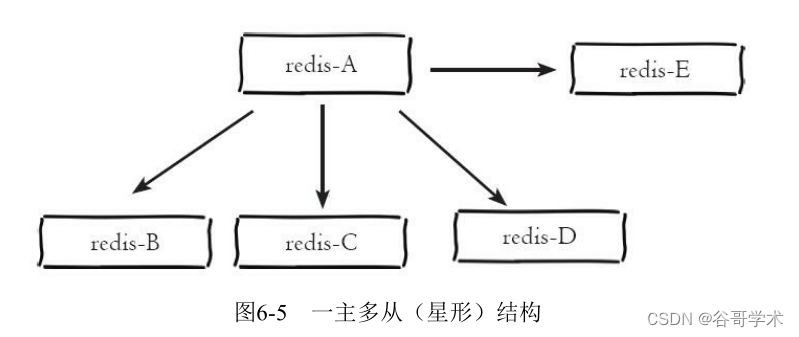
Redis入门完整教程:复制拓扑
This week's hot open source project!

B站6月榜单丨飞瓜数据UP主成长排行榜(哔哩哔哩平台)发布!
Statistics of radar data in nuscenes data set
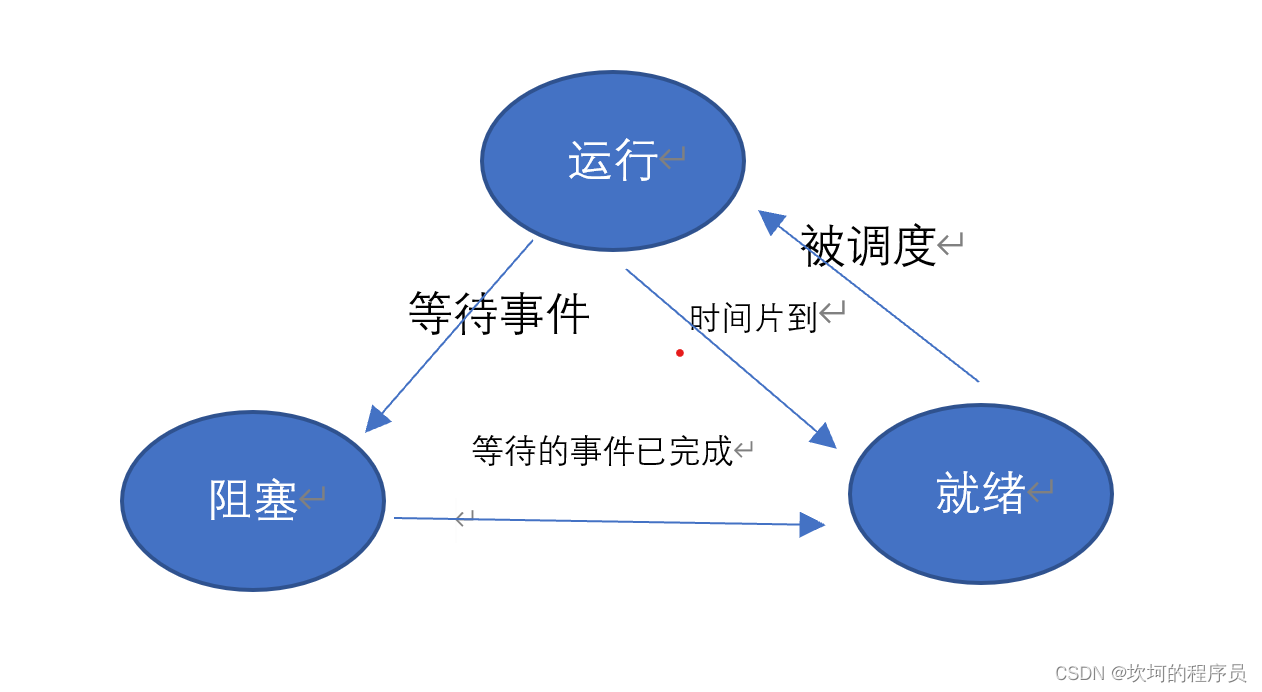
Fundamentals of process management
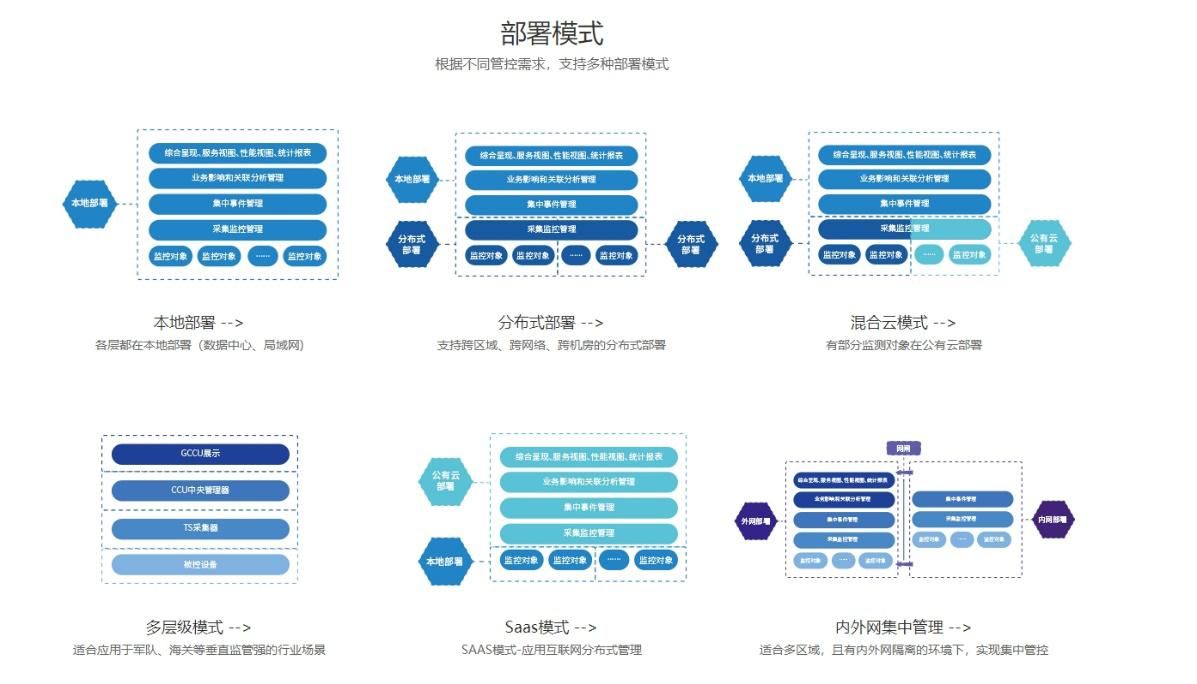
运维管理系统有哪些特色
Station B's June ranking list - feigua data up main growth ranking list (BiliBili platform) is released!

你不可不知道的Selenium 8种元素定位方法,简单且实用
随机推荐
Redis入门完整教程:AOF持久化
差异与阵列和阵列结构和链表的区别
This week's hot open source project!
CSDN 夏令营课程 项目分析
Apifox, is your API interface document rolled up like this?
Web3's need for law
MySQL
C#/VB. Net to delete watermarks in word documents
Code debugging core step memory
QT common Concepts-1
Read fast RCNN in one article
ODBC database connection of MFC windows programming [147] (with source code)
AWS learning notes (I)
Convert widerperson dataset to Yolo format
Django数据库(SQlite)基本入门使用教程
Kysl Haikang camera 8247 H9 ISAPI test
KYSL 海康摄像头 8247 h9 isapi测试
B站6月榜单丨飞瓜数据UP主成长排行榜(哔哩哔哩平台)发布!
Fundamentals of process management
Niuke programming problem -- double pointer of 101 must be brushed