当前位置:网站首页>写作系列之contribution
写作系列之contribution
2022-07-06 18:50:00 【patrickpdx】
例1. Unlike most of the existing works that consider the sensing and transmission for one task as a unit optimization objective, we further study the time consumption trade-off between the sensing and communication in the cellular Internet of UAVs. 在contribution之前,通过文献综述论证前人工作的确在我们要创新的点上存在不足
The main contributions of this paper are summarized as follows. First, we propose a model of the cellular Internet of UAVs, where a UAV updates the data for the sensing tasks frequently in a given period. (研究了什么模型) Second, we formulate a joint sensing and transmission optimization problem to minimize the total AoI of the system, and solve the NP-hard problem with gradient descent and dynamic programming (DP) algorithms. (问题+方法)Third, we prove that there exists only one optimal trade-off between the time for UAV sensing and that for UAV transmission, and verify the effectiveness of our proposed algorithm with simulations.(仿真结果)
摘自 S. Zhang, H. Zhang, L. Song, Z. Han and H. V. Poor, “Sensing and Communication Tradeoff Design for AoI Minimization in a Cellular Internet of UAVs,” ICC 2020 - 2020 IEEE International Conference on Communications (ICC), 2020, pp. 1-6, doi: 10.1109/ICC40277.2020.9148771.
例2. However, the above work only focused on UAV-assisted wireless communications where UAVs are dispatched as dedicated communication platforms … In fact, energy-efficient data uploading via trajectory and communication design for cellular-connected UAV systems with QoS constraints should balance the tradeoff between maximizing data uploading throughput, satisfying communication QoS requirement, and efficiently utilizing the limited on-board energy. Such joint design is challenging, which, to our best knowledge, has not been studied in prior work.
在contribution之前,通过文献综述论证前人工作的确在我们要创新的点上存在不足
In this paper, we aim to overcome the above limitations in the existing designs for UAV communication systems. We consider a cellular-connected UAV system where one energy-constrained UAV flies from an initial location to a final location, while uploading its data to the cellular network subject to a given QoS requirement. We assume that only the statistical channel distribution information (CDI) is available prior to the UAV’s flight, while the instantaneous channel state information (CSI) is available to the UAV in real time along the UAV’s flight.(模型) Our aim is to maximize the total data uploading throughput by jointly optimizing the UAV operation time, communication scheduling, as well as UAV trajectory and transmit power, where both offline and online design approaches are studied. (问题)The main contributions of this paper are summarized as follows:
• First, we formulate the uplink throughput maximization problemfor a cellular-connected UAV communication systemvia jointly optimizing the UAV operation time, communication scheduling, as well as UAV trajectory and transmit power, by taking into account the UAV energy budget and communication QoS requirement between the UAV and GBSs along its flight.
模型+问题
• Second, we focus on the offline design approach for the considered system by utilizing only the CDI knowledge that is available prior to the UAV’s flight. After defining the adopted performance metric and using path discretization technique, we formulate the design as a non convex optimization problem, which is difficult to solve directly. An efficient alternating optimization algorithm is then proposed to simultaneously update UAV velocity and time slot duration, as well as communication time and transmit power allocation at each iteration with successive convex approximation (SCA) technique, which converges to a solution that satisfies the Karush-KuhnTucker (KKT) conditions.
方法
• Third, we study the online design for the considered system by utilizing the instantaneous CSI obtained by the UAV in real time along its flight. An adaptive online optimization algorithm is proposed, by exploiting the similar structure between the online and offline design problems. To further reduce the computational complexity, a low complexity online algorithm based on receding horizon optimization (RHO) is developed by utilizing a combined offline and online design approach.
方法
• Extensive simulations are conducted and the results show that significant throughput improvement can be achieved by proposed designs compared to baseline schemes. Furthermore, our results unveil the tradeoff between system throughput and UAV endurance in the considered system.
摘自 Zhan, Cheng, and Yong Zeng. “Energy-Efficient Data Uploading for Cellular-Connected UAV Systems.” IEEE Transactions on Wireless Communications 19.11 (2020): 7279-7292.
例3. In this paper, we investigate air-ground coordinated communications system in which both UAV-BS trajectories and GU access control are optimized to further improve the system performance. (模型)This is different from most previous works [1]– [15], [17]–[19], [24]–[27], [30]–[32] which focus on either UAVs or GUs. (论证和前人的确在我们要创新的点上存在不足)Specifically, each GU requests to access one UAV-BS to maximize its own throughput and the UAV-BSs(问题)
The main contributions of this paper are summarized as follows:
• We study the air-ground coordinated communications systemwhere the UAV-BS trajectories and GU access control are optimized together instead of just optimizing UAV-BS trajectories or GU access control.
模型+问题
• Based on MADDPG [33], we propose a probabilistic multi-agent deep deterministic policy gradient (PMADDPG) approach to address the problems with hybrid action space. Specifically, PMADDPG transforms the discrete actions into continuous probabilities and samples an action according to the distribution. We then prove the existence of policy gradient, and thus DNN can be optimized in the way of training MADDPG.
方法
• We apply PMADDPG to the air-ground coordinated communications system, and propose AG-PMADDPG (airground PMADDPG) to enable GUs to maximize their own throughput and UAV-BSs to provide fair and highthroughput communication service.
方法
• We analyze the air-ground coordinated communications system from the perspective of game theory. To be specific, we calculate the price of anarchy (POA) [34] of the induced game among competitive GUs and show that the objective would suffer from severe performance loss if GUs learn independently.
结果
摘自 Ding R, Xu Y, Gao F, et al. Trajectory Design and Access Control for Air-Ground Coordinated Communications System with Multi-Agent Deep Reinforcement Learning[J]. IEEE Internet of Things Journal, 2021.
例4. Nevertheless, the decentralized trajectory design problem remains to be lack of discussion. This is important since in practical scenarios the UAVs may belong to different entities, and thus they have the incentive to maximize their own utilities.
The main contributions of this paper can be summarized as
follows.
- We propose a sense-and-send protocol to coordinate UAVs performing real-time sensing tasks, and solve the probability of successful valid sensory data transmission by using nested Markov chains.
- We formulate the decentralized UAV trajectory design problem, and propose an enhanced multi-UAV Q-learning algorithm to solve the problem.
- Simulation results show that the enhanced multi-UAV Q-learning algorithm converges faster and to higher rewards of UAVs compared to both single-agent and opponent modeling Q-learning algorithms.
摘自 Reinforcement Learning for Decentralized Trajectory Design in Cellular UAV Networks With Sense-and-Send Protocol
边栏推荐
- 1500万员工轻松管理,云原生数据库GaussDB让HR办公更高效
- 1个月增长900w+播放!总结B站顶流恰饭的2个新趋势
- 阿里云中间件开源往事
- 猿桌派第三季开播在即,打开出海浪潮下的开发者新视野
- leetcode:736. LISP syntax parsing [flowery + stack + status enumaotu + slots]
- [Mori city] random talk on GIS data (II)
- How can reinforcement learning be used in medical imaging? A review of Emory University's latest "reinforcement learning medical image analysis", which expounds the latest RL medical image analysis co
- 建議收藏!!Flutter狀態管理插件哪家强?請看島上碼農的排行榜!
- Use of fiddler
- 人脸识别应用解析
猜你喜欢
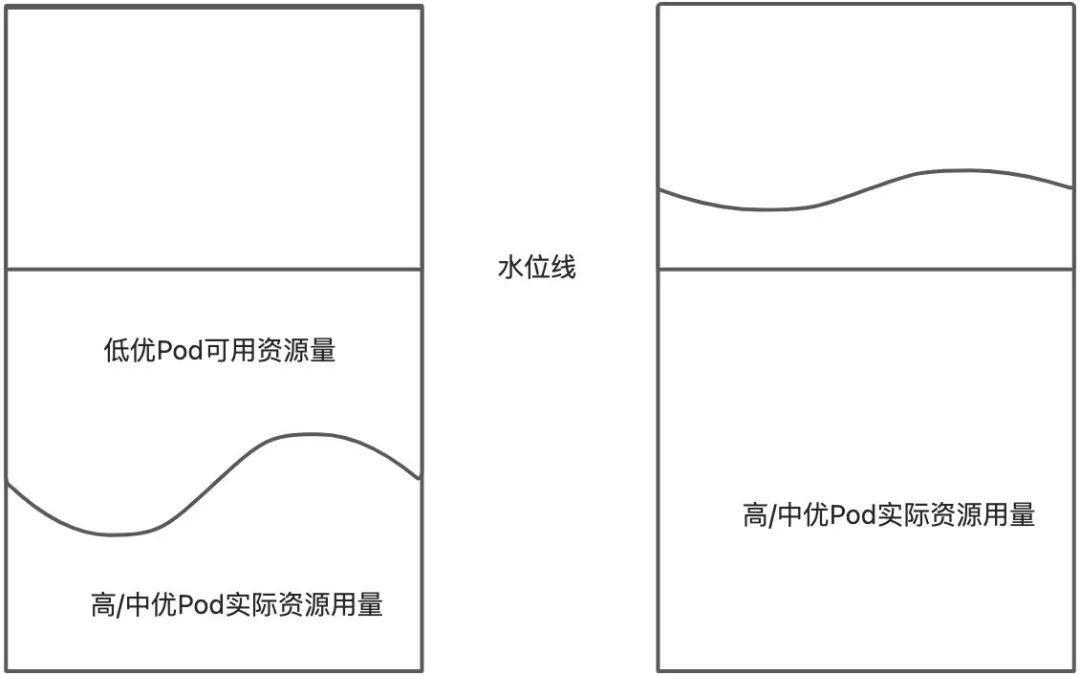
云原生混部最后一道防线:节点水位线设计

Recommended collection!! Which is the best flutter status management plug-in? Please look at the ranking list of yard farmers on the island!
![leetcode:736. LISP syntax parsing [flowery + stack + status enumaotu + slots]](/img/0d/e07fe970167368040eb09b05c3682e.png)
leetcode:736. LISP syntax parsing [flowery + stack + status enumaotu + slots]
Collection recommandée!! Quel plug - in de gestion d'état flutter est le plus fort? Regardez le classement des manons de l'île, s'il vous plaît!
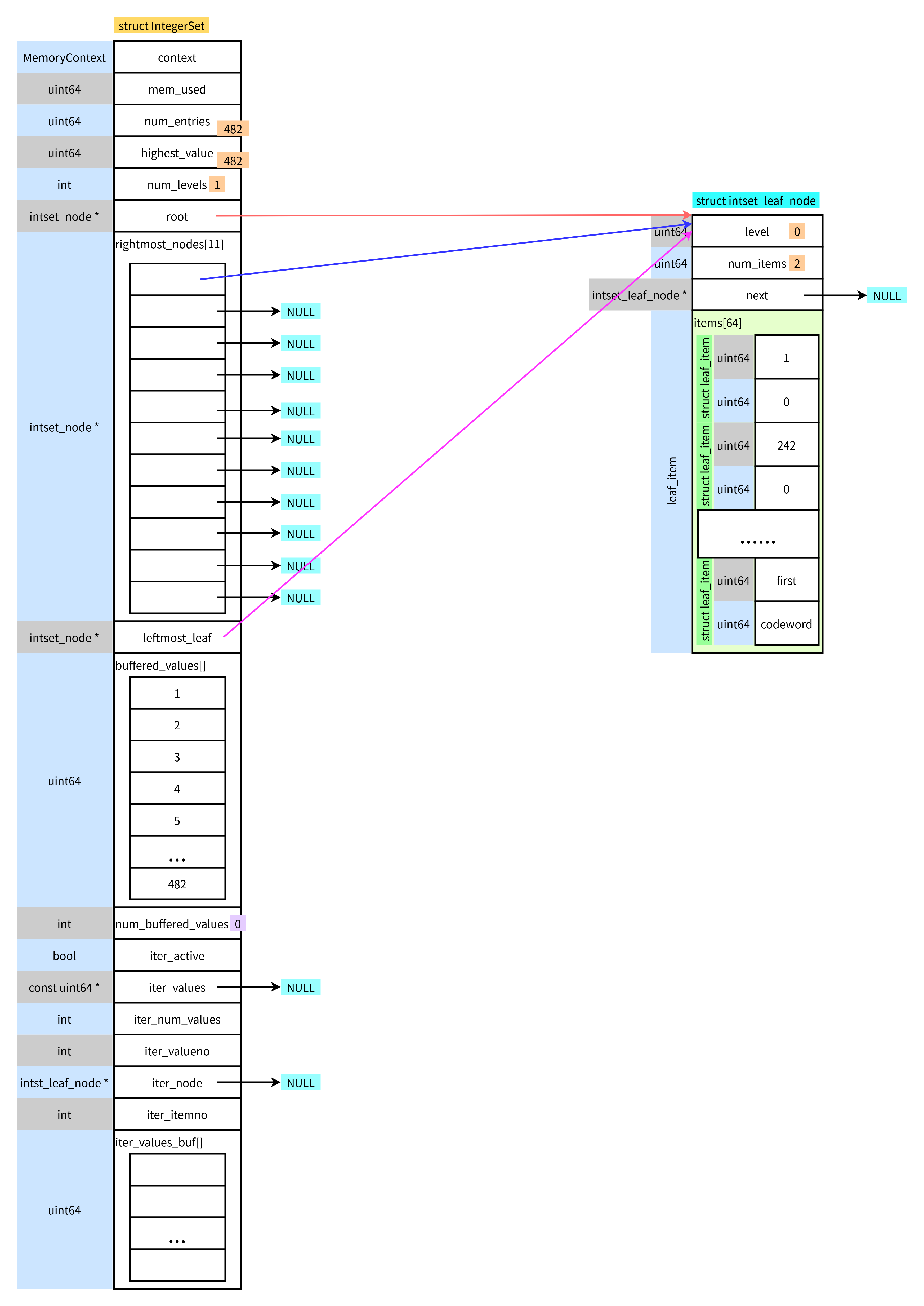
Integerset of PostgreSQL
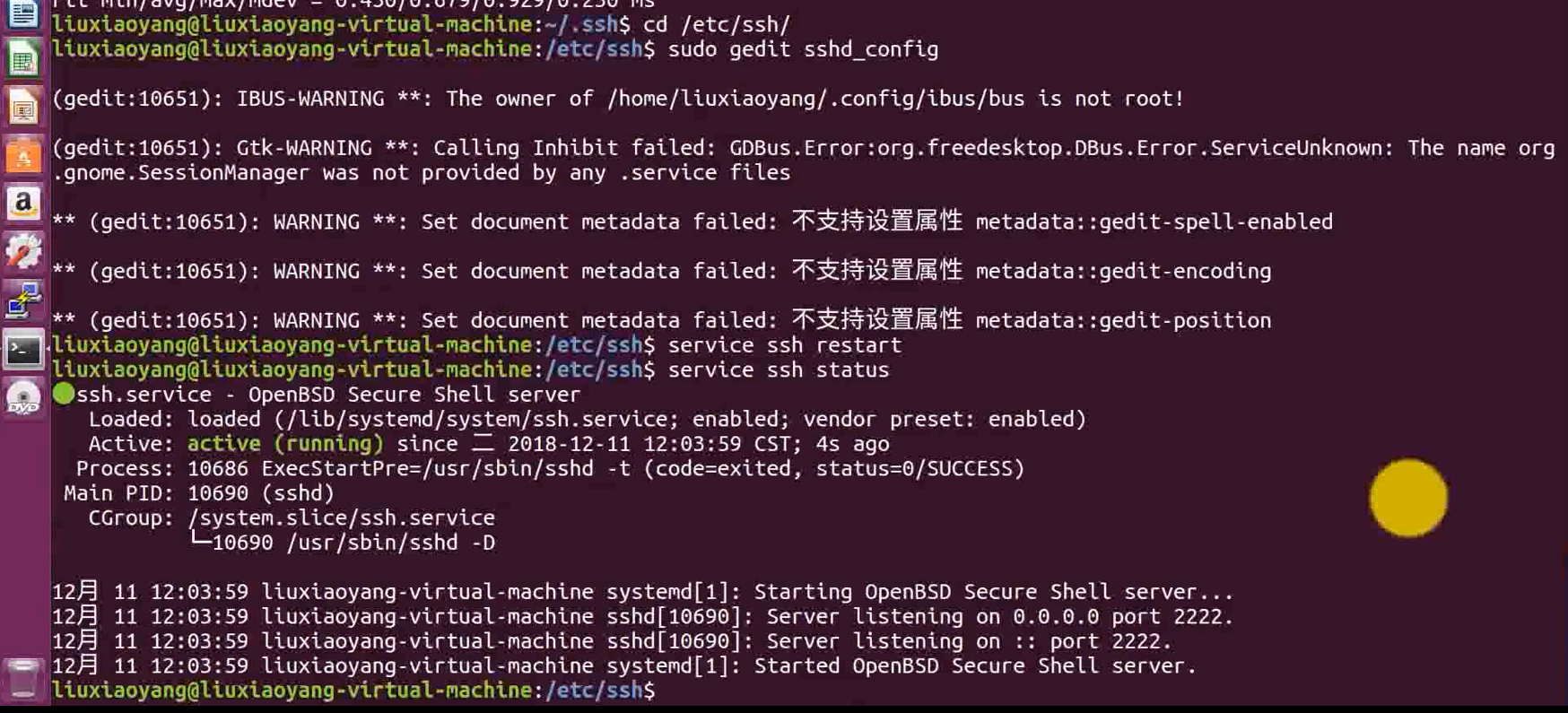
6-6漏洞利用-SSH安全防御

Schedulx v1.4.0 and SaaS versions are released, and you can experience the advanced functions of cost reduction and efficiency increase for free!
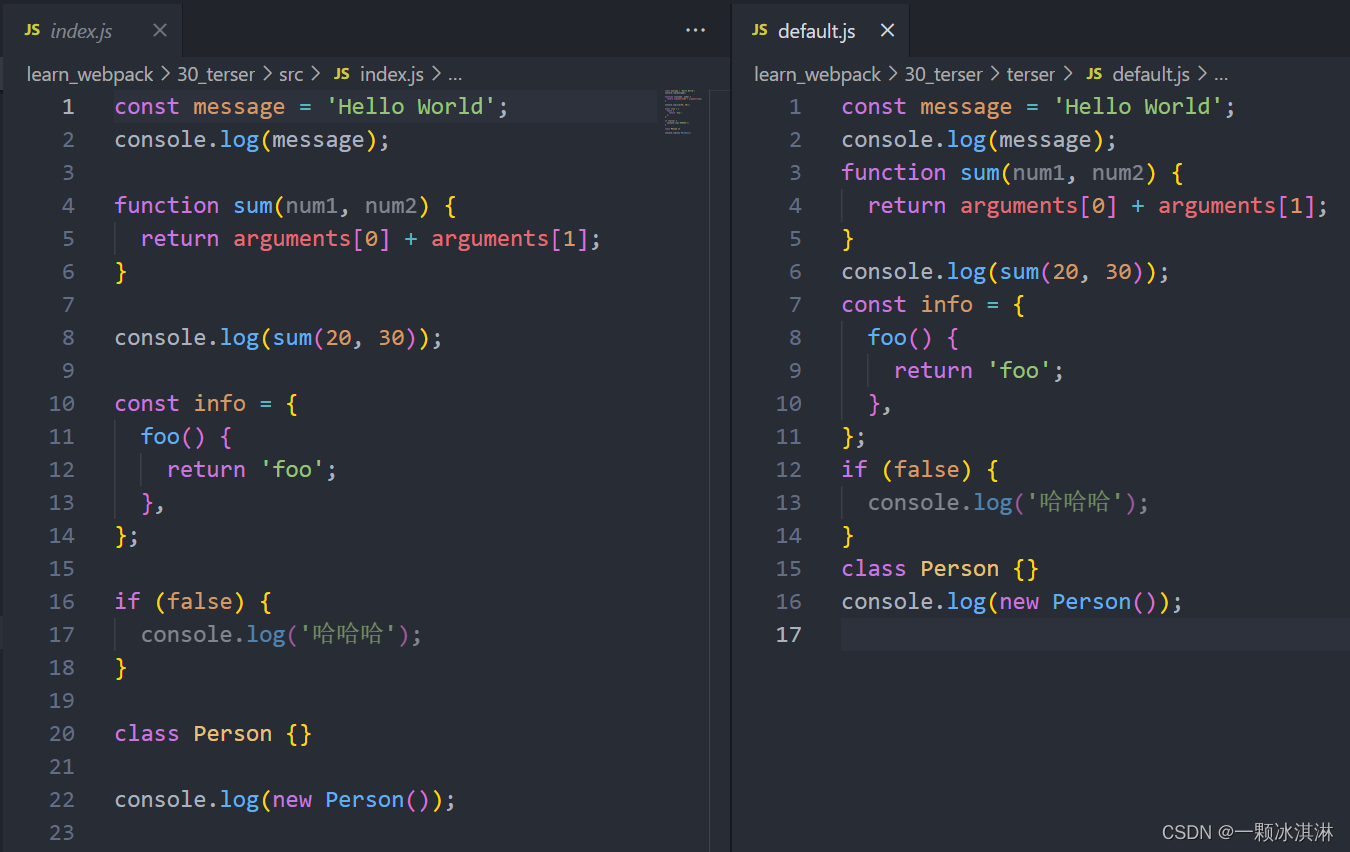
压缩 js 代码就用 terser

Infrared camera: juge infrared mag32 product introduction

A new path for enterprise mid Platform Construction -- low code platform
随机推荐
15million employees are easy to manage, and the cloud native database gaussdb makes HR office more efficient
postgresql之整体查询大致过程
MySQL
leetcode:736. Lisp 语法解析【花里胡哨 + 栈 + 状态enumaotu + slots】
建议收藏!!Flutter状态管理插件哪家强?请看岛上码农的排行榜!
[unity notes] screen coordinates to ugui coordinates
Recent applet development records
MFC Windows 程序设计[147]之ODBC数据库连接(附源码)
Seconds understand the delay and timing function of wechat applet
Increase 900w+ playback in 1 month! Summarize 2 new trends of top flow qiafan in station B
Metaforce force meta universe development and construction - fossage 2.0 system development
Introduction to the internal structure of the data directory of PostgreSQL
Introduction to RC oscillator and crystal oscillator
【Unity】升级版·Excel数据解析,自动创建对应C#类,自动创建ScriptableObject生成类,自动序列化Asset文件
阿里云中间件开源往事
Web开发小妙招:巧用ThreadLocal规避层层传值
How can reinforcement learning be used in medical imaging? A review of Emory University's latest "reinforcement learning medical image analysis", which expounds the latest RL medical image analysis co
postgresql之integerset
Douban average 9 x. Five God books in the distributed field!
Leetcode:minimum_depth_of_binary_tree解决问题的方法