当前位置:网站首页>云原生混部最后一道防线:节点水位线设计
云原生混部最后一道防线:节点水位线设计
2022-07-06 18:34:00 【InfoQ】
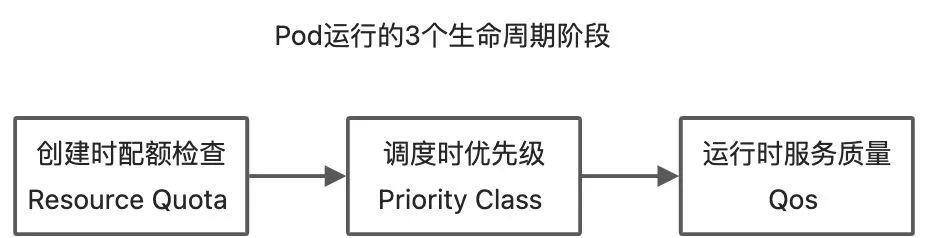
引言
为什么需要单机水位线
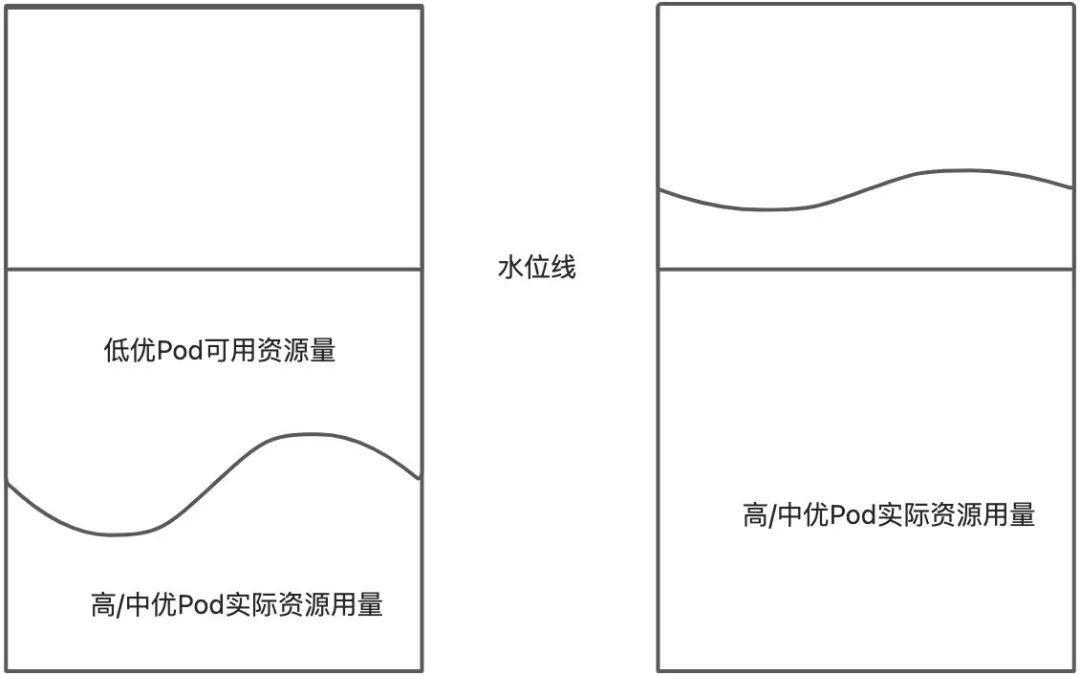
水位线的分级
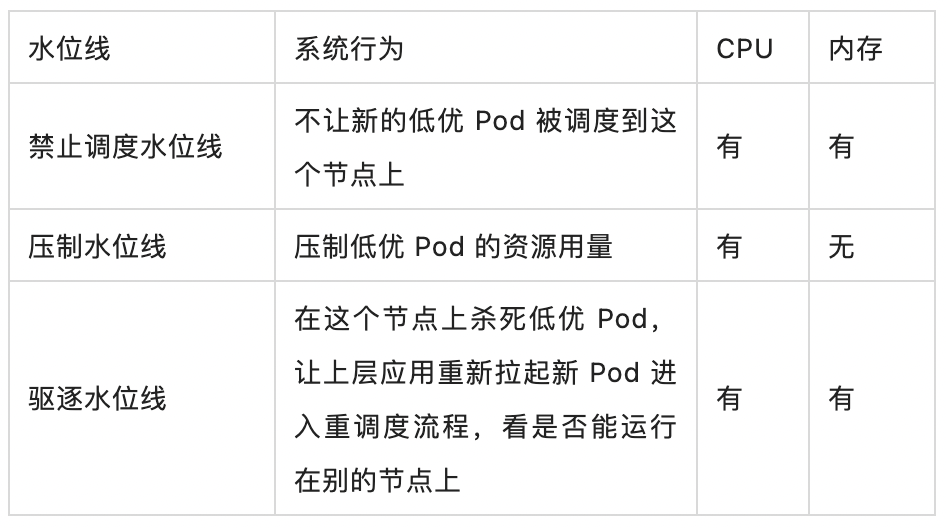
驱逐条件:基于满足度的驱逐模式
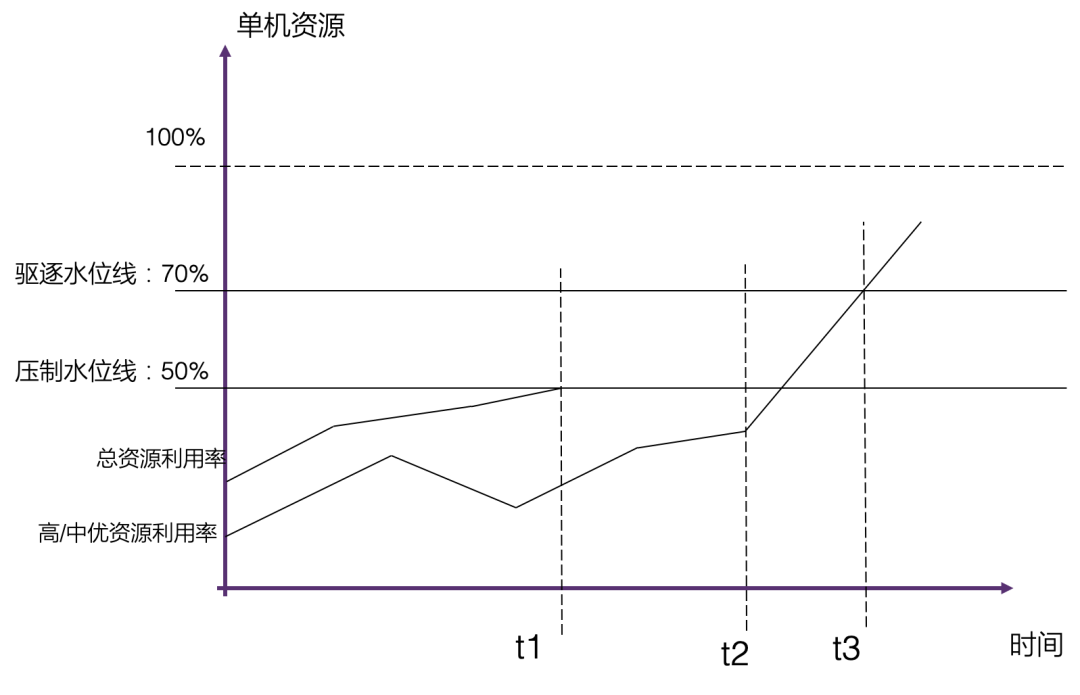
- 在 t1 时间,总资源利用率达到压制水位线的时候,对低优先级的任务进行压制,保证整体资源利用率在压制水位线之下,此时低优任务不会再被调度进来
- 在 t3 时间,总资源利用率开始进一步上升,达到驱逐水位线时,会对低优任务进行删除和驱逐的处理,保证高/中优的资源使用
- 内存的驱逐必须是实时的,因为节点上内存不足,会导致高/中优任务内存不足而 OOM
- 这个延迟时间并不好配置,配的短了没有效果,配了长了反而会引起低优 Pod 长期“饥饿”而造成低优 Pod 运行时间更长
- 如果在一个节点上,有多个低优 Pod 都在运行,是否要驱逐所有的低优 Pod?是否可能尽量的少驱逐 Pod?
- 窗口期:获取 CPU 利用率的时间窗口(例如 5 分钟),在窗口时间的平均 CPU 利用率超过驱逐水位线,则开始驱逐,可以避免抖动
- 低优 Pod 资源满足率:= 低优 Pod 实际资源使用量/低优 Pod Request 资源量
- 低优 Pod 满足率下限:一个百分比值,低于这个值的认为低优 Pod 的资源供给不足
- 窗口期内:平均低优 Pod 资源满足率 < 低优 Pod 满足率下限
- 窗口期内:低优 Pod 平均 CPU 利用率接近 100%(如 90% 或者 80%)
- 当前时间:平均低优 Pod 资源满足率 < 低优 Pod 满足率下限
- 最近时间:BE CPU 利用率接近100%(如 90% 或者 80%)
- 优先驱逐调度优先级 Priority 低的 Pod(是的,即使是低优 Pod,我们还是可以按照数值来细分不同的调度优先级)
- 如果 2 个 Pod 调度优先级一致,则计算驱逐哪一个 Pod 带来的资源释放更多,优先驱逐能释放更多资源的
展望:是否有更好的设计?
相关解决方案介绍
边栏推荐
- Shortcut keys commonly used in idea
- Halcon knowledge: segment_ contours_ XLD operator
- Vingt - trois mille feuilles? "Yang mou" derrière l'explosion de la consommation végétale
- 大咖云集|NextArch基金会云开发Meetup来啦!
- UC伯克利助理教授Jacob Steinhardt预测AI基准性能:AI在数学等领域的进展比预想要快,但鲁棒性基准性能进展较慢
- Introduction to microservice architecture
- Zhang Ping'an: accelerate cloud digital innovation and jointly build an industrial smart ecosystem
- Redis configuration class redisconfig
- Flir Blackfly S 工业相机:配置多个摄像头进行同步拍摄
- 一文带你走进【内存泄漏】
猜你喜欢

张平安:加快云上数字创新,共建产业智慧生态
Time synchronization of livox lidar hardware -- PPS method

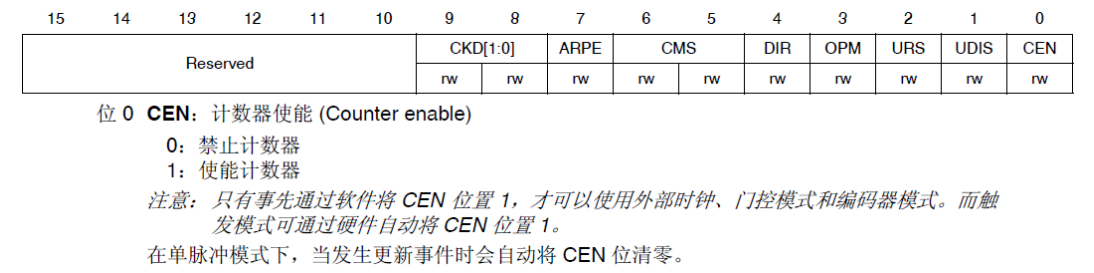
STM32F4---PWM输出
Analyze "C language" [advanced] paid knowledge [i]
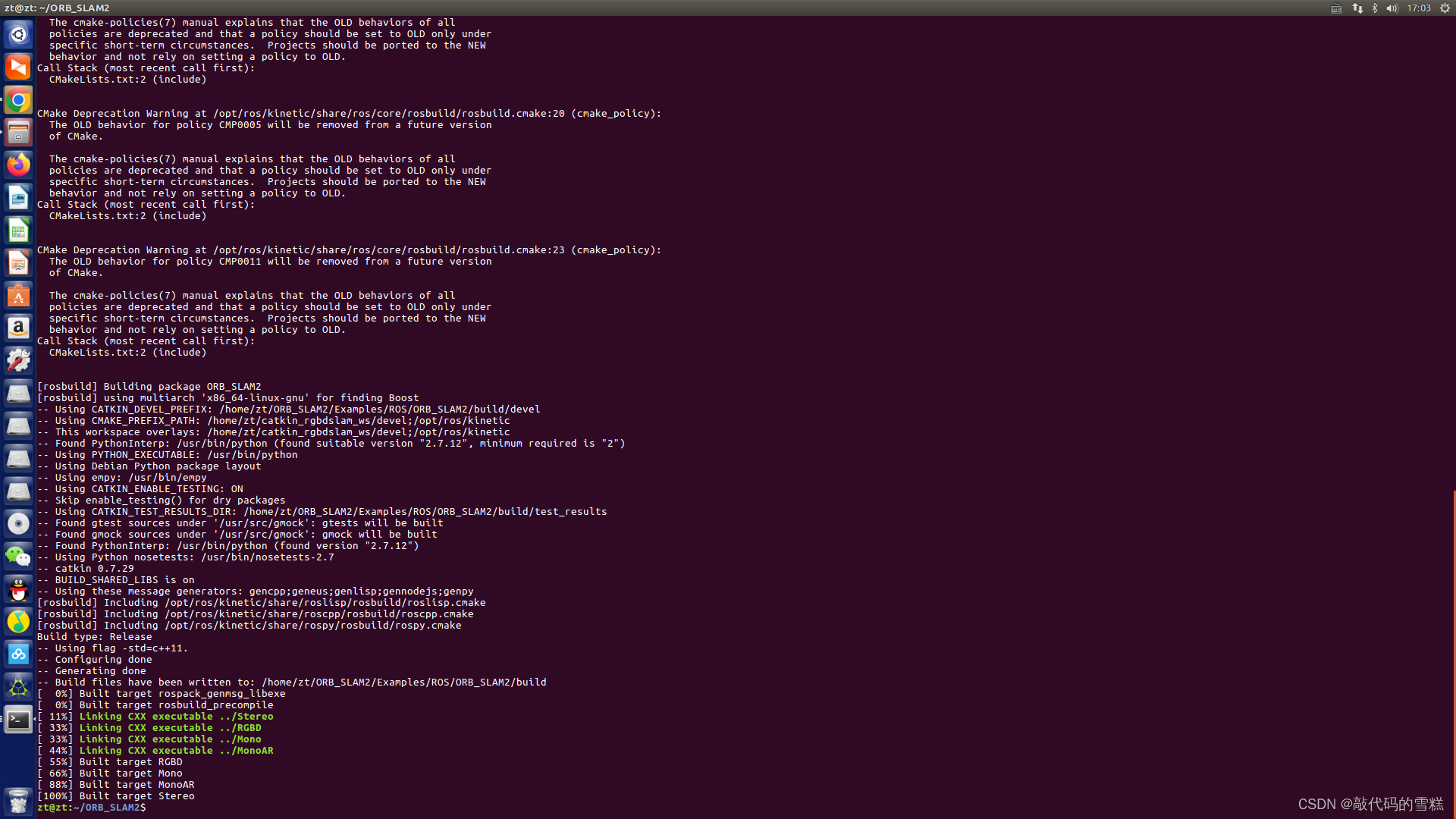
ROS学习(21)机器人SLAM功能包——orbslam的安装与测试
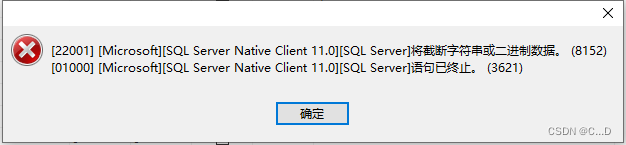
将截断字符串或二进制数据
ROS learning (25) rviz plugin
Analyze "C language" [advanced] paid knowledge [II]

FLIR blackfly s industrial camera: explanation and configuration of color correction and code setting method
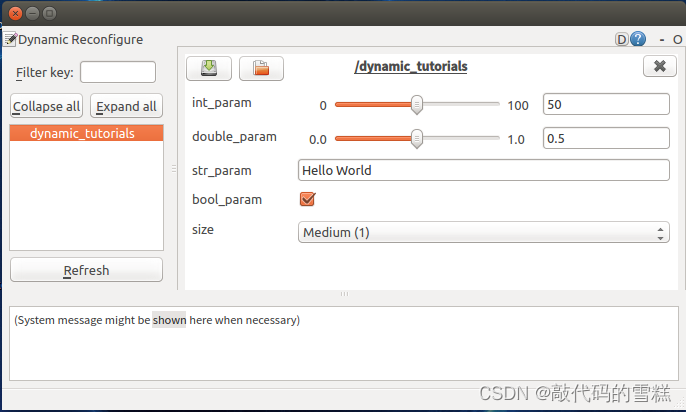
ROS学习(26)动态参数配置
随机推荐
centos8安装mysql报错:The GPG keys listed for the “MySQL 8.0 Community Server“ repository are already ins
【LeetCode】Day97-移除链表元素
NPM install compilation times "cannot read properties of null (reading 'pickalgorithm')“
Scenario practice: quickly build wordpress blog system based on function calculation
SchedulX V1.4.0及SaaS版发布,免费体验降本增效高级功能!
Redis configuration class redisconfig
Word wrap when flex exceeds width
How to use strings as speed templates- How to use String as Velocity Template?
最近小程序开发记录
Get to know MySQL for the first time
Cat recycling bin
建议收藏!!Flutter状态管理插件哪家强?请看岛上码农的排行榜!
3D激光SLAM:Livox激光雷达硬件时间同步
ROS learning (25) rviz plugin
PartyDAO如何在1年内把一篇推文变成了2亿美金的产品DAO
ZOJ problem set – 2563 long dominoes [e.g. pressure DP]
Yiwen takes you into [memory leak]
Box stretch and pull (left-right mode)
传感器:DS1302时钟芯片及驱动代码
Domestic images of various languages, software and systems. It is enough to collect this warehouse: Thanks mirror