当前位置:网站首页>ROS学习(26)动态参数配置
ROS学习(26)动态参数配置
2022-07-06 18:12:00 【敲代码的雪糕】
文章目录
前言
之前的学习中,曾了解过ROS参数服务器的通信机制,如果Listenner不主动查询参数值,就无法获取Talker是否已经向Master更新了参数值。
很多情况下,我们需要动态的更新参数,比如参数调试等,ROS提供了dynamic_reconfigure功能包,实现动态参数配置。
一、原理
ROS的动态参数修改采用C/S架构,在运行过程中,客户端修改参数后不需要重启,而是向服务器发送请求;服务器通过回调函数确认,即可完成参数的动态配置。
二、实现
1、创建功能包
创建名为dynamic_tutorials的功能包,命令如下:
catkin_create_pkg dynamic_tutorials rospy roscpp dynamic_reconfigure
2、创建配置文件
在功能包下的cfg文件夹下,创建名为Tutorials.cfg的文件,内容如下:
#!/usr/bin/env python
PACKAGE = "dynamic_tutorials"
#导入参数生成器
from dynamic_reconfigure.parameter_generator_catkin import *
#创建参数生成器
gen = ParameterGenerator()
#定义需要动态配置的参数,参数分别代表参数名、类型、参数动态配置回调中的掩码、描述、默认值、最小值和最大值(后面两个可选,且对字符串和波尔类型无效)
gen.add("int_param", int_t, 0, "An Integer parameter", 50, 0, 100)
gen.add("double_param", double_t, 0, "A double parameter", .5, 0, 1)
gen.add("str_param", str_t, 0, "A string parameter", "Hello World")
gen.add("bool_param", bool_t, 0, "A Boolean parameter", True)
#定义一个枚举,参数分别代表枚举值名称、类型、值和描述
size_enum = gen.enum([ gen.const("Small", int_t, 0, "A small constant"),
gen.const("Medium", int_t, 1, "A medium constant"),
gen.const("Large", int_t, 2, "A large constant"),
gen.const("ExtraLarge", int_t, 3, "An extra large constant")], "An enum to set size")
#定义一个整型值,可以通过枚举罗列出来
gen.add("size", int_t, 0, "A size parameter which is edited via an enum", 1, 0, 3, edit_method=size_enum)
#生成所有与C++和python相关的文件,并且退出程序,第二个参数表示运行时的节点名,第三个参数为生成文件所使用的前缀,需要与配置文件名相同
exit(gen.generate(PACKAGE, "dynamic_tutorials", "Tutorials"))
真正运行时,需要去掉中文注释。配置完成后,对该文件添加可执行权限。
3、修改CMakeLists.txt文件
添加编译规则,内容如下:
generate_dynamic_reconfigure_options(
cfg/Tutorials.cfg
)
add_dependencies(dynamic_reconfigure_node ${
PROJECT_NAME}_gencfg)
4、创建dynamic_reconfigure_node节点
4、1 创建服务器节点
在src目录下,创建server.cpp文件,内容如下:
#include <ros/ros.h>
#include <dynamic_reconfigure/server.h>
//该头文件是配置文件在编译过程中生成的
#include <dynamic_tutorials/TutorialsConfig.h>
//回调函数,参数分别表示参数更新的配置值、参数修改的掩码
void callback(dynamic_tutorials::TutorialsConfig &config, uint32_t level) {
ROS_INFO("Reconfigure Request: %d %f %s %s %d",
config.int_param, config.double_param,
config.str_param.c_str(),
config.bool_param?"True":"False",
config.size);
}
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc, argv, "dynamic_tutorials");
//创建服务端实例,监听客户端的参数配置请求
dynamic_reconfigure::Server<dynamic_tutorials::TutorialsConfig> server;
//定义回调函数
dynamic_reconfigure::Server<dynamic_tutorials::TutorialsConfig>::CallbackType f;
//回调函数绑定服务端,当客户端请求修改参数时,服务端跳转到回调函数进行处理
f = boost::bind(&callback, _1, _2);
server.setCallback(f);
ROS_INFO("Spinning node");
ros::spin();
return 0;
}
4、2 修改CMakeLists.txt文件
添加编译规则,内容如下:
# for dynamic reconfigure
add_executable(dynamic_reconfigure_node src/server.cpp)
# make sure configure headers are built before any node using them
add_dependencies(dynamic_reconfigure_node ${
PROJECT_NAME}_gencfg)
# for dynamic reconfigure
target_link_libraries(dynamic_reconfigure_node ${
catkin_LIBRARIES})
完成上述配置后,编译功能包。
5、参数动态配置
运行roscore和dynamic_reconfigure_node节点,命令如下:
roscore
rosrun dynamic_tutorials dynamic_reconfigure_node
此时,参数动态配置的服务器就开始运行了,接下来使用ROS提供的可视化参数配置工具来修改参数,命令如下:
rosrun rqt_reconfigure rqt_reconfigure
如图: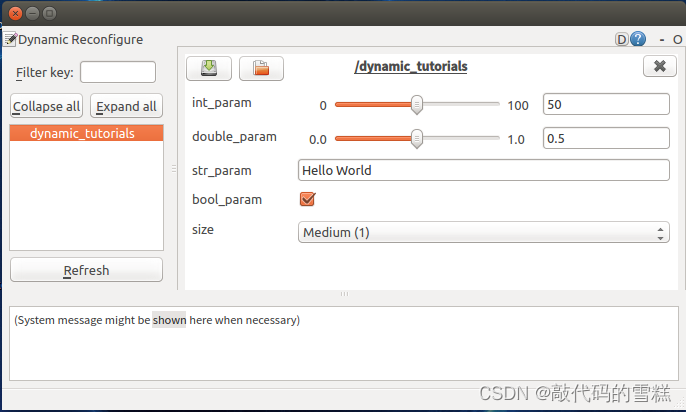
可以通过拖动、输入、下拉框等方式修改参数,值得注意的是,这里的输入方式不同与配置文件中的参数设置有关,例如设置了最大值/最小值,就会有拖动条;设置了枚举,就会出现下拉框。
伴随着参数值的变化,在服务器节点的输出中,会看到修改后的信息,如图:
边栏推荐
- Reptile practice (VI): novel of climbing pen interesting Pavilion
- uva 1401 dp+Trie
- AcWing 1141. 局域网 题解(kruskalkruskal 求最小生成树)
- 移植DAC芯片MCP4725驱动到NUC980
- Yunna | work order management measures, how to carry out work order management
- 1123. The nearest common ancestor of the deepest leaf node
- AI automatically generates annotation documents from code
- Drag to change order
- Long press the button to execute the function
- 盒子拉伸拉扯(左右模式)
猜你喜欢

Dark horse notes - create immutable sets and streams
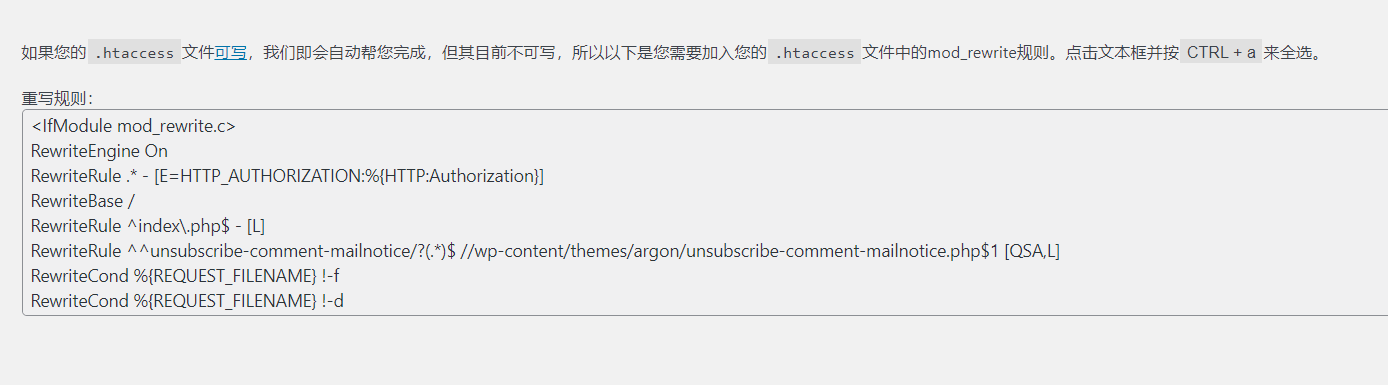
Set WordPress pseudo static connection (no pagoda)
Make Jar, Not War
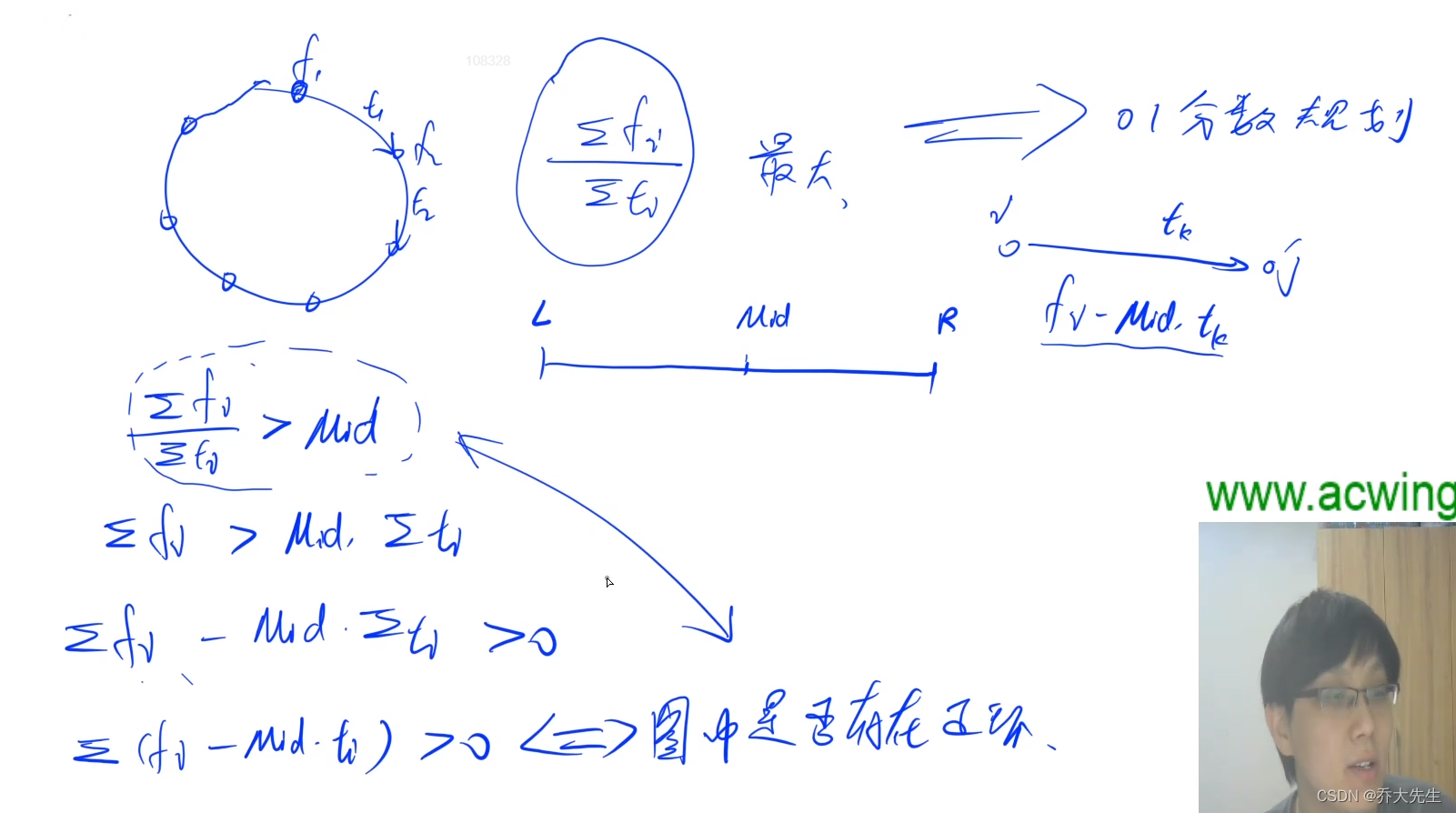
AcWing 361. 观光奶牛 题解(spfa求正环)
JS how to quickly create an array with length n

454 Baidu Mianjing 1

Baidu flying general BMN timing action positioning framework | data preparation and training guide (Part 1)
How can I code for 8 hours without getting tired.
一文带你走进【内存泄漏】

鼠标右键 自定义
随机推荐
7.6 simulation summary
HDU 4661 message passing (wood DP & amp; Combinatorics)
[advanced C language] 8 written questions of pointer
设置Wordpress伪静态连接(无宝塔)
AcWing 1142. 繁忙的都市 题解(最小生成树)
AI automatically generates annotation documents from code
各种语言,软件,系统的国内镜像,收藏这一个仓库就够了: Thanks-Mirror
Long press the button to execute the function
uva 1401 dp+Trie
How to prevent overfitting in cross validation
WCF Foundation
Gin introduction practice
AcWing 345. 牛站 题解(floyd的性质、倍增)
AcWing 346. Solution to the problem of water splashing festival in the corridor (deduction formula, minimum spanning tree)
域分析工具BloodHound的使用说明
制作带照明的DIY焊接排烟器
Curl command
C语言实例_2
公钥\私人 ssh避password登陆
安利一波C2工具