当前位置:网站首页>15million employees are easy to manage, and the cloud native database gaussdb makes HR office more efficient
15million employees are easy to manage, and the cloud native database gaussdb makes HR office more efficient
2022-07-07 02:14:00 【InfoQ】
The flow peak is concentrated , Data reading and writing meet challenges
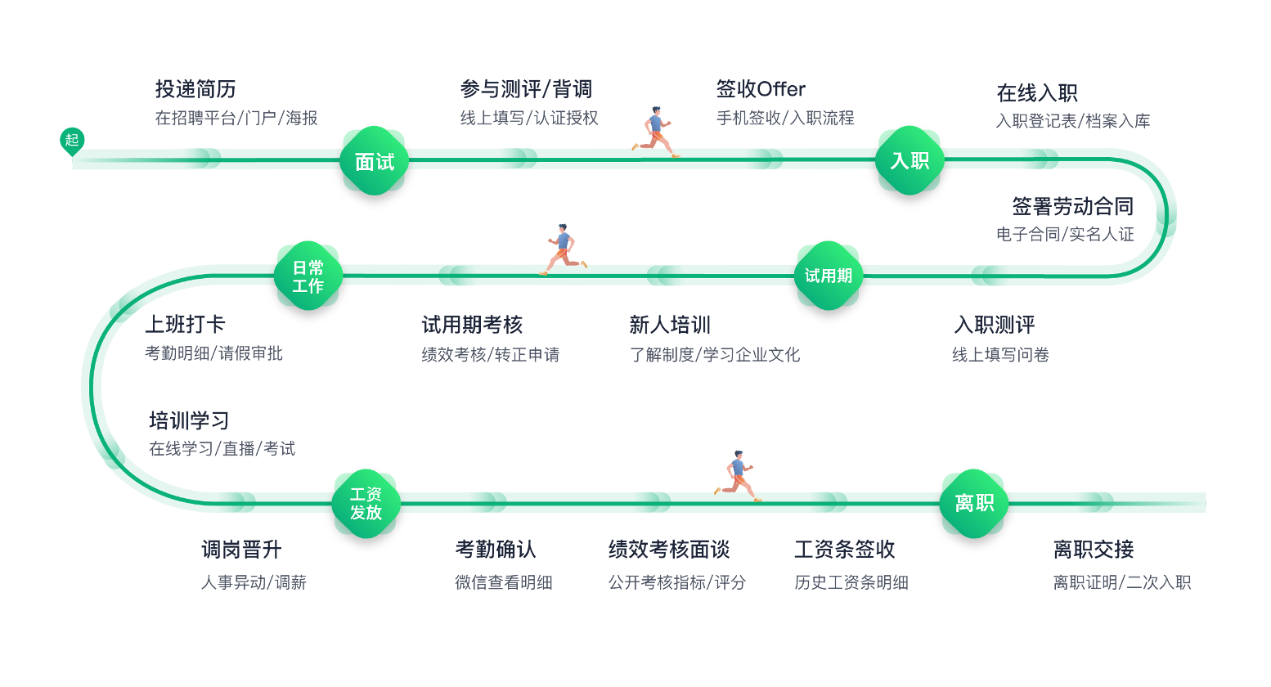
- Peak data read / write: Common attendance punching business scenarios , Due to the concentration of clock in time , The peak is as high as per second10 ten thousand +, Concurrent access pressure , Even through a series of heterogeneous and high-performance NoSQL To alleviate the impact of the flood peak on the basic database , But the challenge is still huge .
- Scale level data accounting: Common month end attendance accounting 、 Business scenario of salary accounting , Because a large number of enterprises will initiate the data accounting of the whole enterprise at the end and beginning of the month , The accounting will pull up the record data of the whole month and the major modules of the whole company , And thenMillions of linesData reading and writing pressure .
Brand new base , Efficient management
边栏推荐
- Freeswitch dials extension number source code tracking
- 刨析《C语言》【进阶】付费知识【一】
- ROS学习(二十)机器人SLAM功能包——rgbdslam的安装与测试
- 传感器:土壤湿度传感器(XH-M214)介绍及stm32驱动代码
- C语言【23道】经典面试题【下】
- ROS learning (24) plugin
- Batch delete data in SQL - set in entity
- Ds-5/rvds4.0 variable initialization error
- C language [23] classic interview questions [Part 2]
- 【Unity】升级版·Excel数据解析,自动创建对应C#类,自动创建ScriptableObject生成类,自动序列化Asset文件
猜你喜欢

建议收藏!!Flutter状态管理插件哪家强?请看岛上码农的排行榜!

Modify the system time of Px4 flight control

SchedulX V1.4.0及SaaS版发布,免费体验降本增效高级功能!
Several classes and functions that must be clarified when using Ceres to slam

FLIR blackfly s industrial camera: synchronous shooting of multiple cameras through external trigger

阿里云中间件开源往事
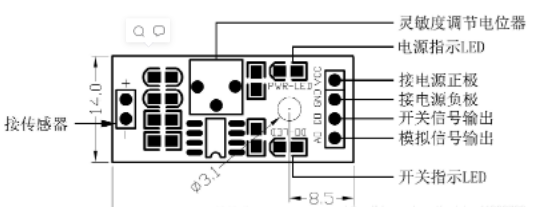
传感器:土壤湿度传感器(XH-M214)介绍及stm32驱动代码
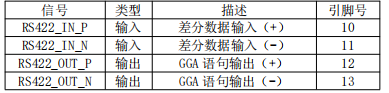
Integrated navigation: product description and interface description of zhonghaida inav2
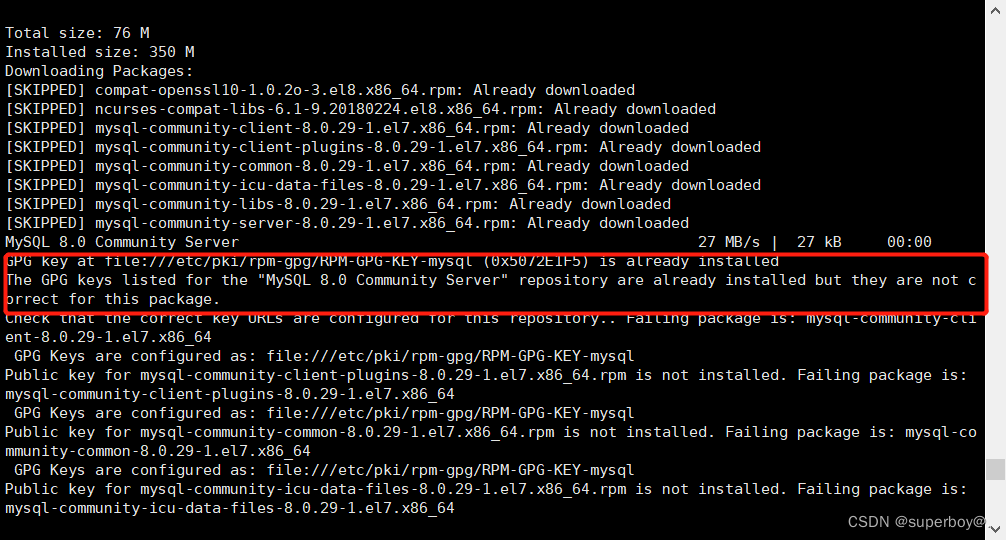
The GPG keys listed for the "MySQL 8.0 community server" repository are already ins
How can reinforcement learning be used in medical imaging? A review of Emory University's latest "reinforcement learning medical image analysis", which expounds the latest RL medical image analysis co
随机推荐
@Before, @after, @around, @afterreturning execution sequence
Related programming problems of string
ROS学习(24)plugin插件
将截断字符串或二进制数据
ROS learning (26) dynamic parameter configuration
张平安:加快云上数字创新,共建产业智慧生态
Correct use of BigDecimal
The GPG keys listed for the "MySQL 8.0 community server" repository are already ins
Recent applet development records
Domestic images of various languages, software and systems. It is enough to collect this warehouse: Thanks mirror
PartyDAO如何在1年内把一篇推文变成了2亿美金的产品DAO
FLIR blackfly s industrial camera: auto exposure configuration and code
Date processing tool class dateutils (tool class 1)
String or binary data will be truncated
猫猫回收站
CISP-PTE之命令注入篇
张平安:加快云上数字创新,共建产业智慧生态
Shell script quickly counts the number of lines of project code
STM32F4---PWM输出
NPM install compilation times "cannot read properties of null (reading 'pickalgorithm')“