当前位置:网站首页>ROS learning (XX) robot slam function package -- installation and testing of rgbdslam
ROS learning (XX) robot slam function package -- installation and testing of rgbdslam
2022-07-07 01:52:00 【Ice cream with code】
List of articles
Preface
In the previous study ,slam The constructed maps are all two-dimensional maps , At present, many algorithms can realize the map construction of three-dimensional information , Robots not only know where obstacles are in the map , And also know what the obstacle is .
ROS Provides a variety of 3D SLAM Function pack ,rgbdslam That's one of them , This chapter mainly studies rgbdslam Installation and testing of .
One 、 New workspace
The order is as follows :
mkdir -p ~/catkin_rgbdslam_ws/src
cd ~/catkin_rgbdslam_ws/src
catkin_init_workspace
cd ~/catkin_rgbdslam_ws
catkin_make
Two 、 download rgbdslam_v2 Corresponding to the author g2o
The order is as follows :
cd ~/catkin_rgbdslam_ws/src
sudo apt-get install libsuitesparse-dev
git clone https://github.com/felixendres/g2o.git
cd g2o
mkdir build
cd build
cmake ..
make..
sudo make install
among , The second command is responsible for installing dependencies .
3、 ... and 、 install pcl1.8
download , The order is as follows :
cd ~
wget https://github.com/PointCloudLibrary/pcl/archive/pcl-1.8.0.tar.gz
tar -xvzf pcl-pcl-1.8.0.tar.gz
cd ~/pcl-pcl-1.8.0
gedit CMakeLists.txt
Add the following to CMakeLists.txt Of the 146 That's ok ( stay endif() after ), Add C++11 Support :
SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
compile 、 install , The order is as follows :
cd ~/pcl-pcl-1.8.0
mkdir build
cd build
cmake ../
make VERBOSE=1
sudo make install
Four 、 To configure rgbdslam_v2
The order is as follows :
cd ~/catkin_rgbdslam_ws/src
git clone https://github.com/felixendres/rgbdslam_v2
cd rgbdslam_v2
gedit CMakeLists.txt
modify CMakeLists The contents of the document , take
find_package(PCL 1.7 REQUIRED COMPONENTS common io)
Change it to :
find_package(PCL 1.8 REQUIRED COMPONENTS common io)
And add the following at the lowest end :
SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
modify /opt/ros/kinetic/share/pcl_ros/cmake/pcl_rosConfig.cmake file , Will all /usr/lib/x86_64-linux-gnu/libpcl_ Change the beginning to /usr/local/lib/libpcl_( A total of 34 individual )
5、 ... and 、 structure siftgpu library
The order is as follows :
cd ~/catkin_rgbdslam_ws/src/rgbdslam_v2/external/SiftGPU
sudo apt-get install libglew-dev
sudo apt-get install libdevil1c2 libdevil-dev
make
6、 ... and 、 compile rgbdslam_v2
The order is as follows :
cd ~/catkin_rgbdslam_ws
catkin_make
cd build/rgbdslam_v2
make VERBOSE=1
make install
If compiled opencv error , According to this blog openCV Step on the pit diary To operate , Then recompile .
7、 ... and 、 test
1、 A simple test
Open a new terminal , function roscore
roscore
Switch to /catkin_rgbdslam_ws/devel/lib/rgbdslam/ Under the table of contents , Open another terminal , Run the following command :
./rgbdslam
The interface is as follows :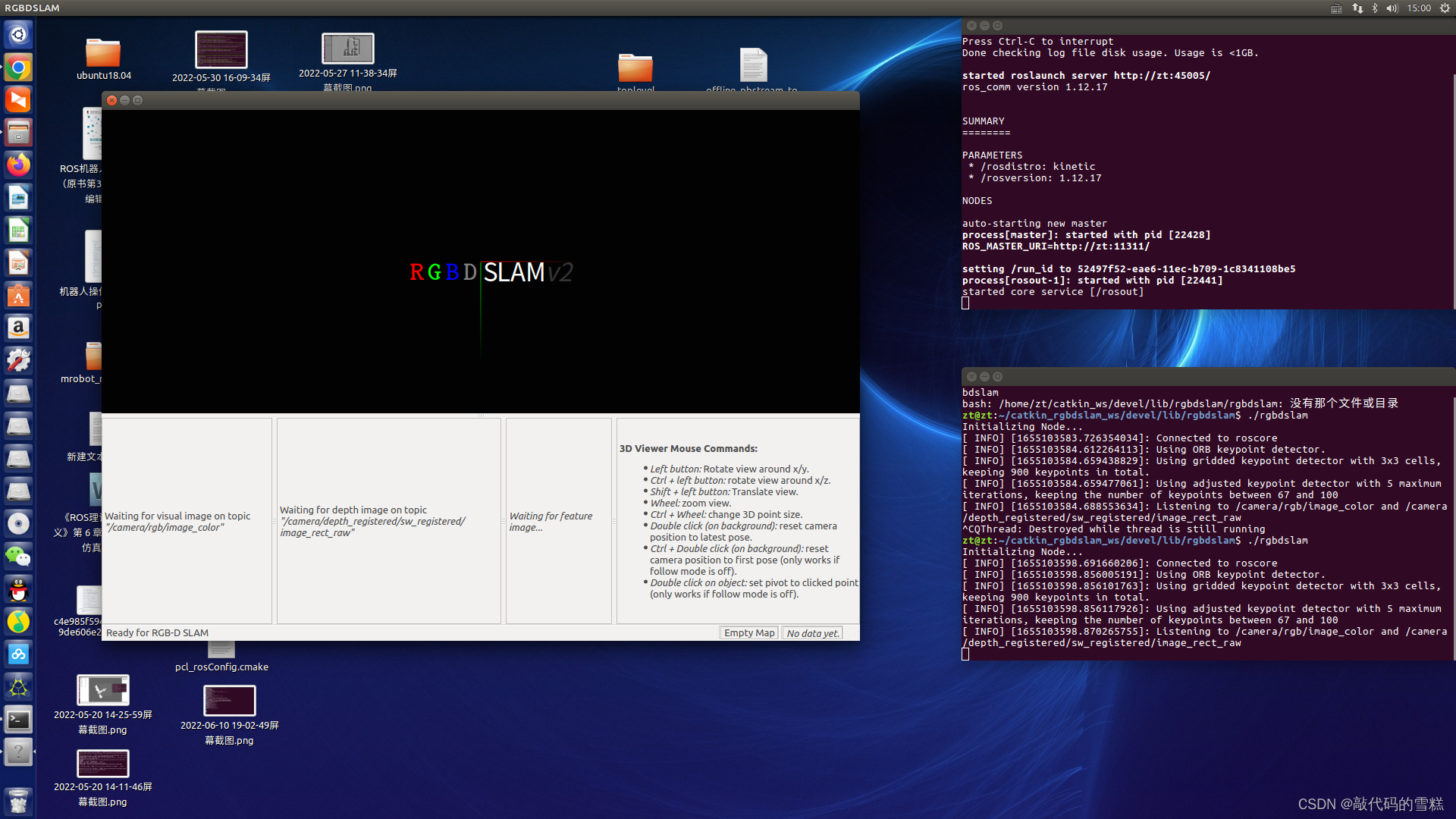
If this interface displays normally , Then prove rgbdslam Installation successful .
2、 Dataset testing
Download datasets , Download address :http://vision.in.tum.de/data/datasets/rgbd-dataset/download#freiburg1_room, Will download okay .bag The documents are stored in catkin_rgbdslam_ws/rgdb_data Under the table of contents .
modify rgdbslam.launch file , Make sure the topic you subscribe to is consistent with the data set , The modification is as follows :
<param name="config/topic_image_mono" value="/camera/rgb/image_color"/>
<param name="config/topic_image_depth" value="/camera/depth/image"/>
Open the terminal , Enter the command as follows :
roscore
Switch to rgdbslam_v2/launch Under the table of contents , Open a new terminal , The order is as follows :
roslaunch rgbdslam rgbdslam.launch
The interface is as follows :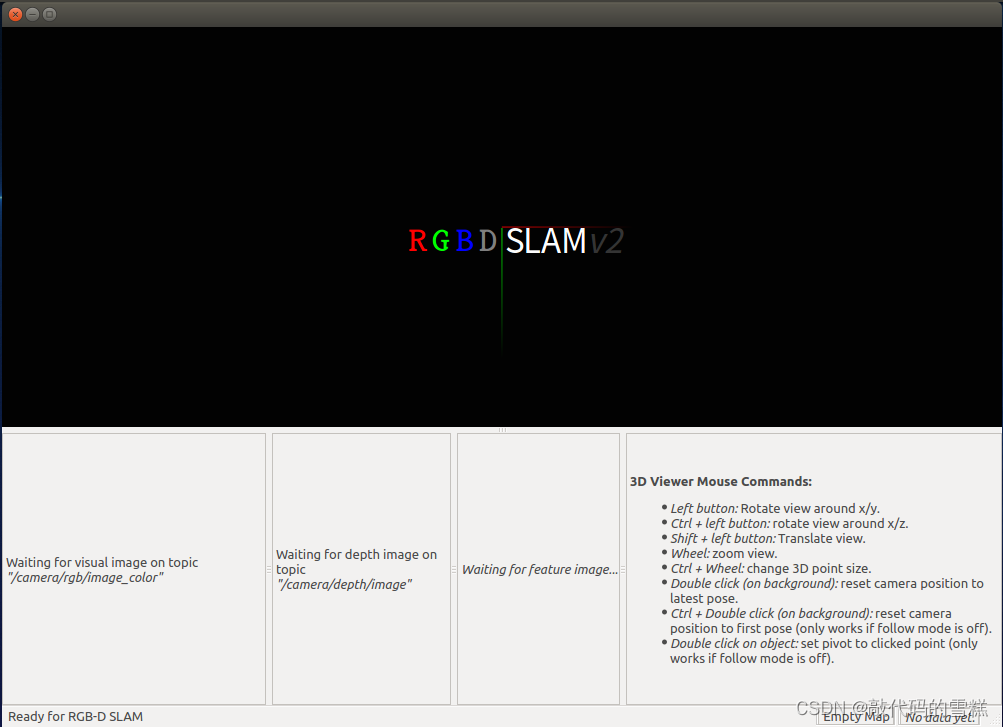
Switch to catkin_rgbdslam_ws/rgdb_data Under the table of contents , Open a new terminal , The order is as follows :
rosbag play rgbd_dataset_freiburg1_room.bag
When the data package starts publishing data , You can see the image data and slam The process of , as follows :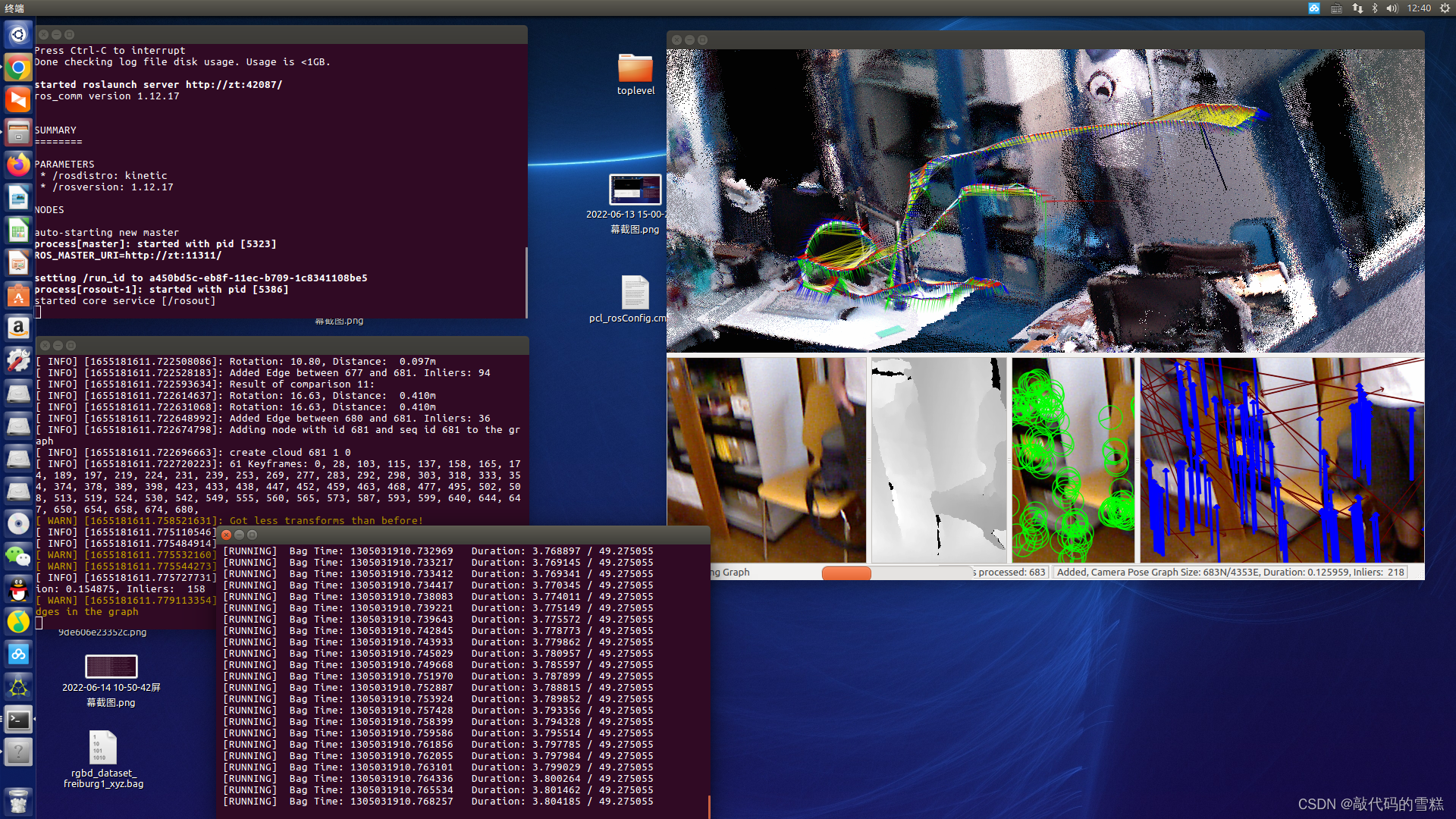
When the construction is finished , Directly select Save as point cloud data in the menu bar , I keep it in rgdb_data Under the table of contents , The file named quicksave.pcd.
have access to pcl_ros Function pack view the saved point cloud map :
rosrun pcl_ros pcd_to_pointcloud quicksave.pcd
边栏推荐
- Yiwen takes you into [memory leak]
- C language instance_ three
- AcWing 1148. 秘密的牛奶运输 题解(最小生成树)
- Make DIY welding smoke extractor with lighting
- AcWing 344. Solution to the problem of sightseeing tour (Floyd finding the minimum ring of undirected graph)
- Use nodejs to determine which projects are packaged + released
- AcWing 361. Sightseeing cow problem solution (SPFA seeking positive ring)
- 百度飞将BMN时序动作定位框架 | 数据准备与训练指南 (上)
- C语言【23道】经典面试题【下】
- Long press the button to execute the function
猜你喜欢



随机推荐
ZOJ Problem Set – 2563 Long Dominoes 【如压力dp】
sql中批量删除数据---实体中的集合
盒子拉伸拉扯(左右模式)
Shell script quickly counts the number of lines of project code
刨析《C语言》【进阶】付费知识【一】
长按按钮执行函数
json学习初体验–第三者jar包实现bean、List、map创json格式
字符串转成日期对象
Compile command line terminal swift
AcWing 346. Solution to the problem of water splashing festival in the corridor (deduction formula, minimum spanning tree)
Hutool post requests to set the body parameter to JSON data
DS-5/RVDS4.0变量初始化错误
对C语言数组的再认识
Right mouse button customization
JS how to quickly create an array with length n
AcWing 1140. 最短网络 (最小生成树)
Golang foundation - data type
ROS学习(十九)机器人SLAM功能包——cartographer
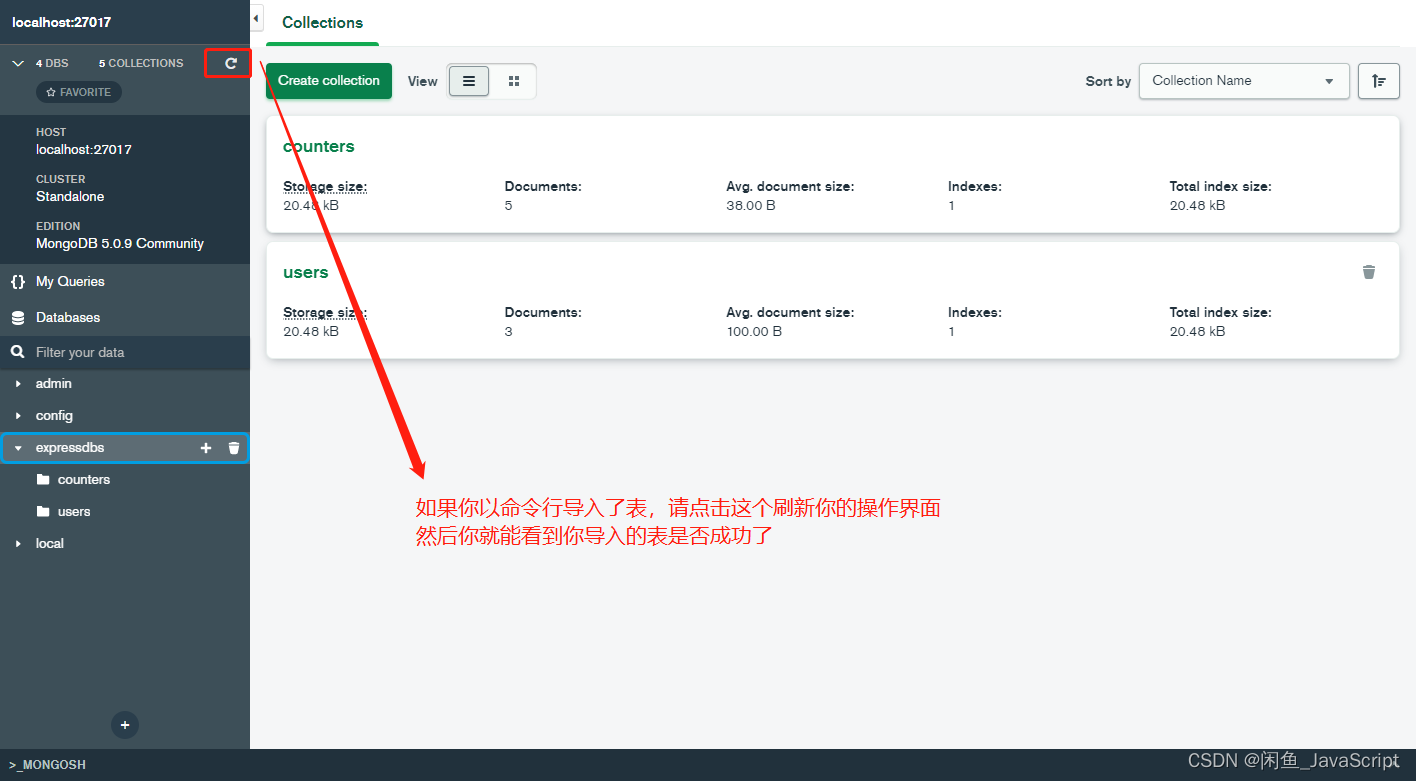
Mongodb checks whether the table is imported successfully
Basic introduction and use of dvajs