当前位置:网站首页>ROS学习(25)rviz plugin插件
ROS学习(25)rviz plugin插件
2022-07-06 18:12:00 【敲代码的雪糕】
文章目录
前言
RVIZ是ROS提供的一款3D可视化工具,其作为一种可扩展化的视图工具,可以使用插件机制添加丰富的功能模块。RVIZ中常用的激光数据、图像数据的可视化显示其实都是官方提供的插件。
下面,通过实现一个速度控制的插件,熟悉rviz plugin插件的实现过程。
这篇文章源码来自胡老师的书-《ROS机器人开发实践》。
一、功能描述
界面如图:
该插件使用Qt开发,包含三个输入框,分别是话题名、线速度和角速度。
二、创建功能包
命令如下:
catkin_create_pkg rviz_teleop_commander roscpp rviz std_msgs
这个功能包依赖于RVIZ,因为RVIZ是基于Qt开发的,所以不需要单独列出对Qt的依赖。
三、代码实现
1、创建teleop_pad.h文件
文件内容如下:
#ifndef TELEOP_PAD_H
#define TELEOP_PAD_H
//所需要包含的头文件
#ifndef Q_MOC_RUN
#include <ros/ros.h>
#include <ros/console.h>
#include <rviz/panel.h> //plugin基类的头文件
#endif
class QLineEdit;
namespace rviz_teleop_commander
{
// 所有的plugin都必须是rviz::Panel的子类
class TeleopPanel: public rviz::Panel
{
// 后边需要用到Qt的信号和槽,都是QObject的子类,所以需要声明Q_OBJECT宏
Q_OBJECT
public:
// 构造函数,在类中会用到QWidget的实例来实现GUI界面,这里先初始化为0即可
TeleopPanel( QWidget* parent = 0 );
// 重载rviz::Panel积累中的函数,用于保存、加载配置文件中的数据,在我们这个plugin
// 中,数据就是topic的名称
virtual void load( const rviz::Config& config );
virtual void save( rviz::Config config ) const;
// 公共槽.
public Q_SLOTS:
// 当用户输入topic的命名并按下回车后,回调用此槽来创建一个相应名称的topic publisher
void setTopic( const QString& topic );
// 内部槽.
protected Q_SLOTS:
void sendVel(); // 发布当前的速度值
void update_Linear_Velocity(); // 根据用户的输入更新线速度值
void update_Angular_Velocity(); // 根据用户的输入更新角速度值
void updateTopic(); // 根据用户的输入更新topic name
// 内部变量.
protected:
// topic name输入框
QLineEdit* output_topic_editor_;
QString output_topic_;
// 线速度值输入框
QLineEdit* output_topic_editor_1;
QString output_topic_1;
// 角速度值输入框
QLineEdit* output_topic_editor_2;
QString output_topic_2;
// ROS的publisher,用来发布速度topic
ros::Publisher velocity_publisher_;
// ROS节点句柄
ros::NodeHandle nh_;
// 当前保存的线速度和角速度值
float linear_velocity_;
float angular_velocity_;
};
} // end namespace rviz_teleop_commander
#endif // TELEOP_PANEL_H
2、创建teleop_pad.cpp文件
文件内容如下:
#include <stdio.h>
#include <QPainter>
#include <QLineEdit>
#include <QVBoxLayout>
#include <QHBoxLayout>
#include <QLabel>
#include <QTimer>
#include <geometry_msgs/Twist.h>
#include <QDebug>
#include "teleop_pad.h"
namespace rviz_teleop_commander
{
// 构造函数,初始化变量
TeleopPanel::TeleopPanel( QWidget* parent )
: rviz::Panel( parent )
, linear_velocity_( 0 )
, angular_velocity_( 0 )
{
// 创建一个输入topic命名的窗口
QVBoxLayout* topic_layout = new QVBoxLayout;
topic_layout->addWidget( new QLabel( "Teleop Topic:" ));
output_topic_editor_ = new QLineEdit;
topic_layout->addWidget( output_topic_editor_ );
// 创建一个输入线速度的窗口
topic_layout->addWidget( new QLabel( "Linear Velocity:" ));
output_topic_editor_1 = new QLineEdit;
topic_layout->addWidget( output_topic_editor_1 );
// 创建一个输入角速度的窗口
topic_layout->addWidget( new QLabel( "Angular Velocity:" ));
output_topic_editor_2 = new QLineEdit;
topic_layout->addWidget( output_topic_editor_2 );
QHBoxLayout* layout = new QHBoxLayout;
layout->addLayout( topic_layout );
setLayout( layout );
// 创建一个定时器,用来定时发布消息
QTimer* output_timer = new QTimer( this );
// 设置信号与槽的连接
// 输入topic命名,回车后,调用updateTopic()
connect( output_topic_editor_, SIGNAL( editingFinished() ), this, SLOT( updateTopic() ));
// 输入线速度值,回车后,调用update_Linear_Velocity()
connect( output_topic_editor_1, SIGNAL( editingFinished() ), this, SLOT( update_Linear_Velocity() ));
// 输入角速度值,回车后,调用update_Angular_Velocity()
connect( output_topic_editor_2, SIGNAL( editingFinished() ), this, SLOT( update_Angular_Velocity() ));
// 设置定时器的回调函数,按周期调用sendVel()
connect( output_timer, SIGNAL( timeout() ), this, SLOT( sendVel() ));
// 设置定时器的周期,100ms
output_timer->start( 100 );
}
// 更新线速度值
void TeleopPanel::update_Linear_Velocity()
{
// 获取输入框内的数据
QString temp_string = output_topic_editor_1->text();
// 将字符串转换成浮点数
float lin = temp_string.toFloat();
// 保存当前的输入值
linear_velocity_ = lin;
}
// 更新角速度值
void TeleopPanel::update_Angular_Velocity()
{
QString temp_string = output_topic_editor_2->text();
float ang = temp_string.toFloat() ;
angular_velocity_ = ang;
}
// 更新topic命名
void TeleopPanel::updateTopic()
{
setTopic( output_topic_editor_->text() );
}
// 设置topic命名
void TeleopPanel::setTopic( const QString& new_topic )
{
// 检查topic是否发生改变.
if( new_topic != output_topic_ )
{
output_topic_ = new_topic;
// 如果命名为空,不发布任何信息
if( output_topic_ == "" )
{
velocity_publisher_.shutdown();
}
// 否则,初始化publisher
else
{
velocity_publisher_ = nh_.advertise<geometry_msgs::Twist>( output_topic_.toStdString(), 1 );
}
Q_EMIT configChanged();
}
}
// 发布消息
void TeleopPanel::sendVel()
{
if( ros::ok() && velocity_publisher_ )
{
geometry_msgs::Twist msg;
msg.linear.x = linear_velocity_;
msg.linear.y = 0;
msg.linear.z = 0;
msg.angular.x = 0;
msg.angular.y = 0;
msg.angular.z = angular_velocity_;
velocity_publisher_.publish( msg );
}
}
// 重载父类的功能
void TeleopPanel::save( rviz::Config config ) const
{
rviz::Panel::save( config );
config.mapSetValue( "Topic", output_topic_ );
}
// 重载父类的功能,加载配置数据
void TeleopPanel::load( const rviz::Config& config )
{
rviz::Panel::load( config );
QString topic;
if( config.mapGetString( "Topic", &topic ))
{
output_topic_editor_->setText( topic );
updateTopic();
}
}
} // end namespace rviz_teleop_commander
// 声明此类是一个rviz的插件
#include <pluginlib/class_list_macros.h>
PLUGINLIB_EXPORT_CLASS(rviz_teleop_commander::TeleopPanel,rviz::Panel )
// END_TUTORIAL
四、编译插件
1、创建plugin的描述文件
在功能包根目录下,创建plugin的描述文件,文件名为plugin_description.xml,内容如下:
<library path="lib/librviz_teleop_commander">
<class name="rviz_teleop_commander/TeleopPanel"
type="rviz_teleop_commander::TeleopPanel"
base_class_type="rviz::Panel">
<description>
A panel widget allowing simple diff-drive style robot base control.
</description>
</class>
</library>
2、修改package.xml文件
在package.xml文件中添加plugin_description.xml文件路径,内容如下:
<export>
<rviz plugin="${prefix}/plugin_description.xml"/>
</export>
3、修改CMakeLists.txt文件
添加编译规则,内容如下:
## This plugin includes Qt widgets, so we must include Qt like so:
find_package(Qt5 COMPONENTS Core Widgets REQUIRED)
set(QT_LIBRARIES Qt5::Widgets)
## I prefer the Qt signals and slots to avoid defining "emit", "slots",
## etc because they can conflict with boost signals, so define QT_NO_KEYWORDS here.
add_definitions(-DQT_NO_KEYWORDS)
## Here we specify which header files need to be run through "moc",
## Qt's meta-object compiler.
qt5_wrap_cpp(MOC_FILES
src/teleop_pad.h
)
## Here we specify the list of source files, including the output of
## the previous command which is stored in ``${MOC_FILES}``.
set(SOURCE_FILES
src/teleop_pad.cpp
${
MOC_FILES}
)
## An rviz plugin is just a shared library, so here we declare the
## library to be called ``${PROJECT_NAME}`` (which is
## "rviz_plugin_tutorials", or whatever your version of this project
## is called) and specify the list of source files we collected above
## in ``${SOURCE_FILES}``.
add_library(${
PROJECT_NAME} ${
SOURCE_FILES})
## Link the library with whatever Qt libraries have been defined by
## the ``find_package(Qt4 ...)`` line above, and with whatever libraries
## catkin has included.
##
## Although this puts "rviz_plugin_tutorials" (or whatever you have
## called the project) as the name of the library, cmake knows it is a
## library and names the actual file something like
## "librviz_plugin_tutorials.so", or whatever is appropriate for your
## particular OS.
target_link_libraries(${
PROJECT_NAME} ${
QT_LIBRARIES} ${
catkin_LIBRARIES})
## END_TUTORIAL
## Install rules
install(TARGETS
${
PROJECT_NAME}
ARCHIVE DESTINATION ${
CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${
CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${
CATKIN_PACKAGE_BIN_DESTINATION}
)
install(FILES
plugin_description.xml
DESTINATION ${
CATKIN_PACKAGE_SHARE_DESTINATION})
做好上述修改后,就可以编译该功能包了,命令如下:
catkin_make --pkg rviz_teleop_commander
五、运行插件
首先运行roscore,命令如下:
roscore
运行RVIZ,命令如下:
rosrun rviz rviz
点击菜单栏中的Panels选项,选择Add New Panel,在插件列表中就可以看到刚刚创建的插件,如图:
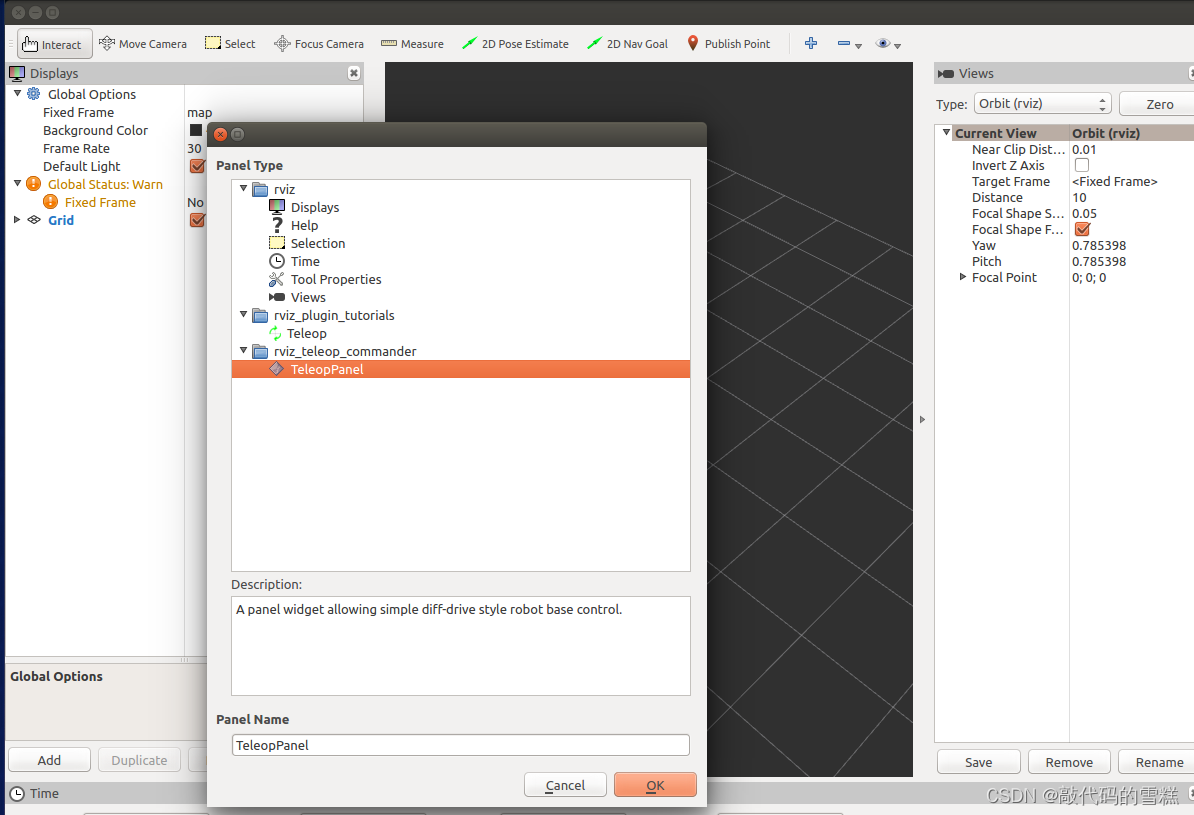
点击OK后,就可以看到,该插件的界面,输入参数值,如下: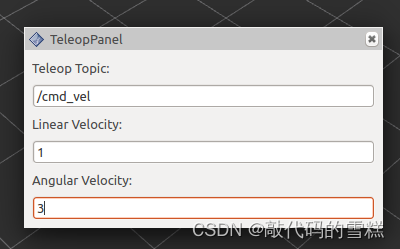
运行命令:
rostopic echo /cmd_vel
效果如下: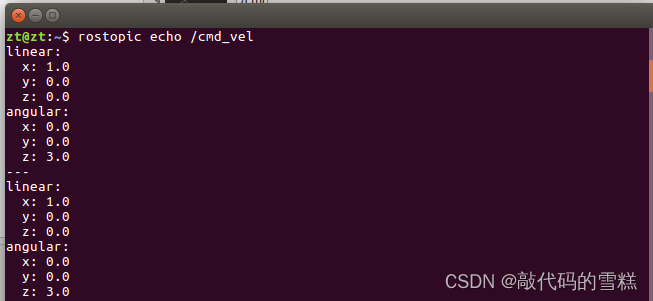
可以看到ROS中已经有节点在发布/cmd_vel话题的消息了。
边栏推荐
- Dark horse notes - create immutable sets and streams
- Mysqlbackup restores specific tables
- AcWing 345. 牛站 题解(floyd的性质、倍增)
- MySQL's most basic select statement
- Ds-5/rvds4.0 variable initialization error
- Start from the bottom structure to learn the customization and testing of fpga---- FIFO IP
- 454-百度面经1
- Gin 入门实战
- Today's question -2022/7/4 modify string reference type variables in lambda body
- 刨析《C语言》【进阶】付费知识【完结】
猜你喜欢
AcWing 1148. Secret milk transportation problem solution (minimum spanning tree)
域分析工具BloodHound的使用说明

Right mouse button customization
C语言关于链表的代码看不懂?一篇文章让你拿捏二级指针并深入理解函数参数列表中传参的多种形式
Appium基础 — Appium Inspector定位工具(一)

LeetCode:1175. 质数排列

Baidu flying general BMN timing action positioning framework | data preparation and training guide (Part 1)
制作带照明的DIY焊接排烟器
Box stretch and pull (left-right mode)

对C语言数组的再认识
随机推荐
AcWing 1142. 繁忙的都市 题解(最小生成树)
golang 基础 —— 数据类型
Share a general compilation method of so dynamic library
Can't you understand the code of linked list in C language? An article allows you to grasp the secondary pointer and deeply understand the various forms of parameter passing in the function parameter
MySQL最基本的SELECT(查询)语句
Scenario practice: quickly build wordpress blog system based on function calculation
编译命令行终端 swift
百度飞将BMN时序动作定位框架 | 数据准备与训练指南 (上)
Yunna | work order management software, work order management software app
Baidu flying general BMN timing action positioning framework | data preparation and training guide (Part 1)
字符串转成日期对象
Sword finger offer II 035 Minimum time difference - quick sort plus data conversion
AcWing 346. 走廊泼水节 题解(推公式、最小生成树)
Dark horse notes - create immutable sets and streams
Match VIM from zero (0) -- Introduction to vimscript
Appium foundation - appium inspector positioning tool (I)
Google released a security update to fix 0 days that have been used in chrome
swiper组件中使用video导致全屏错位
子网划分、构造超网 典型题
How can I code for 8 hours without getting tired.