当前位置:网站首页>@Before, @after, @around, @afterreturning execution sequence
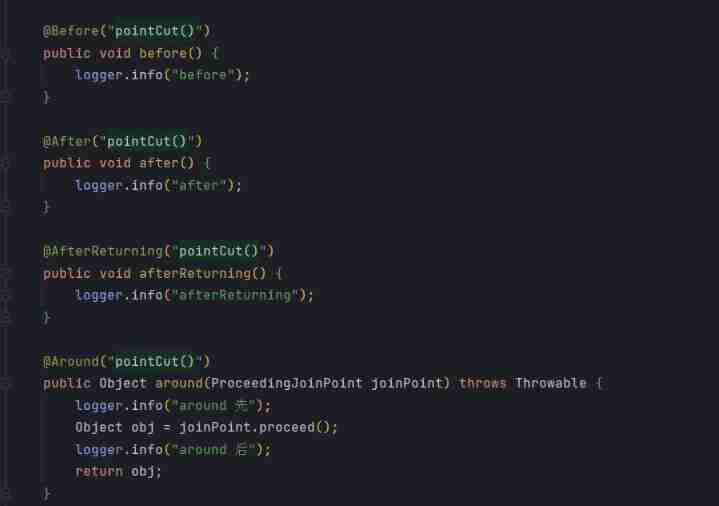
@Before, @after, @around, @afterreturning execution sequence
2022-07-07 01:49:00 【dreaming9420】
The test results are as follows 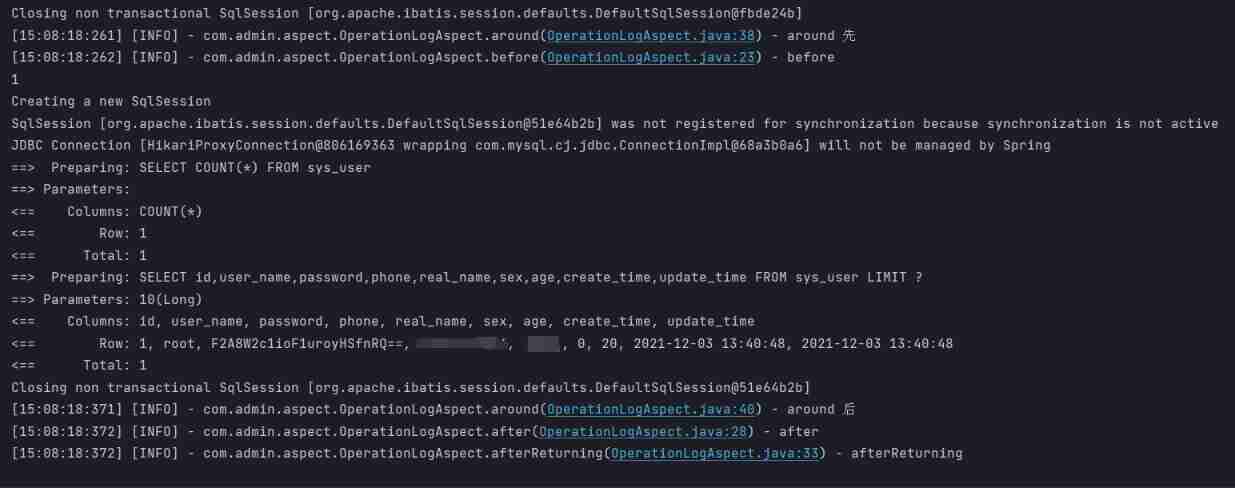
边栏推荐
- ROS學習(23)action通信機制
- 图片打水印 缩放 和一个输入流的转换
- 各种语言,软件,系统的国内镜像,收藏这一个仓库就够了: Thanks-Mirror
- Machine learning: the difference between random gradient descent (SGD) and gradient descent (GD) and code implementation.
- ROS学习(24)plugin插件
- C language instance_ four
- AcWing 1142. 繁忙的都市 题解(最小生成树)
- Share a general compilation method of so dynamic library
- ROS学习(21)机器人SLAM功能包——orbslam的安装与测试
- 糊涂工具类(hutool)post请求设置body参数为json数据
猜你喜欢
ROS学习(二十)机器人SLAM功能包——rgbdslam的安装与测试
dvajs的基础介绍及使用
Instructions for using the domain analysis tool bloodhound

Baidu flying general BMN timing action positioning framework | data preparation and training guide (Part 1)

Recognition of C language array
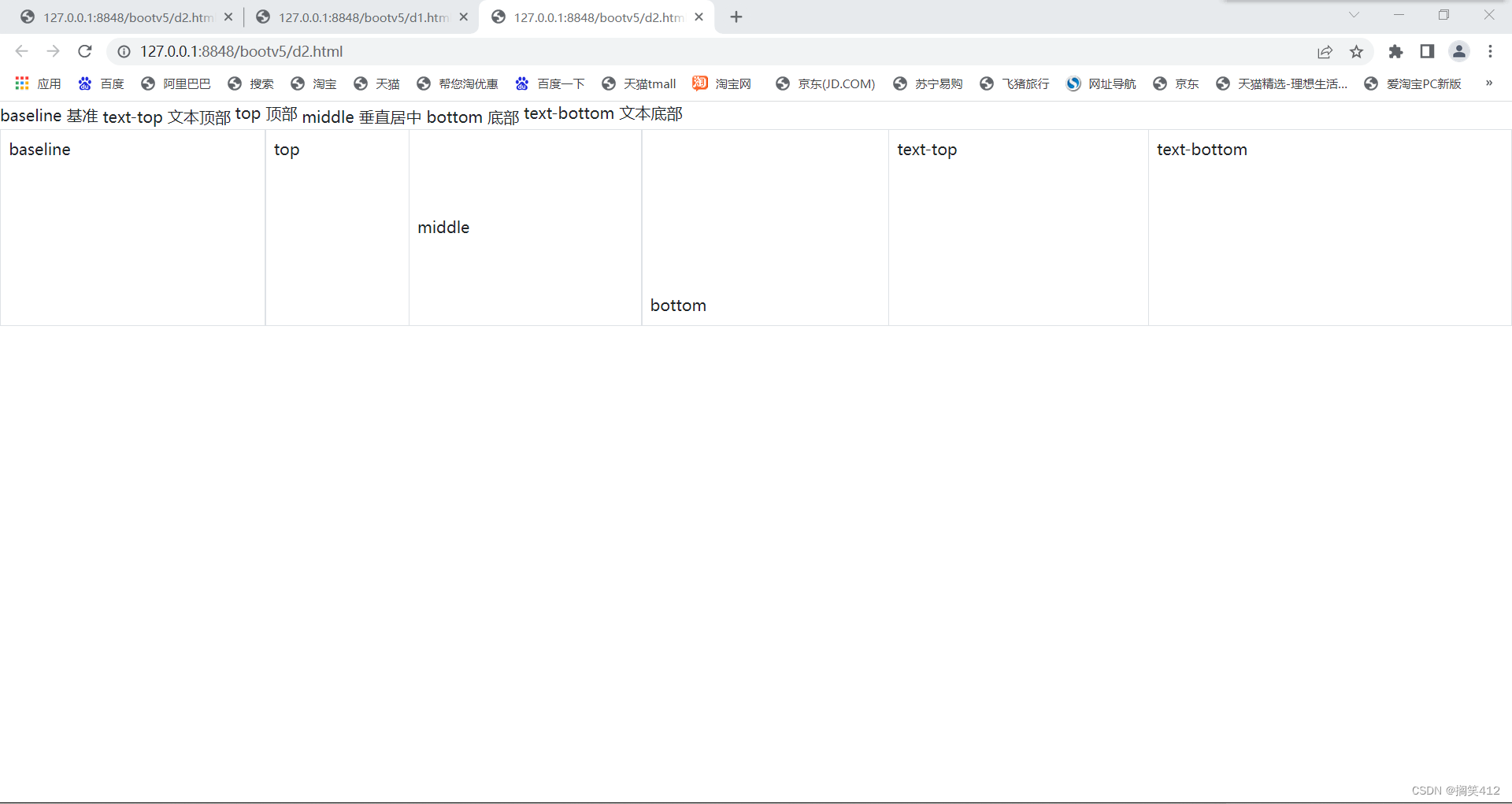
2022/0524/bookstrap
百度飞将BMN时序动作定位框架 | 数据准备与训练指南 (下)
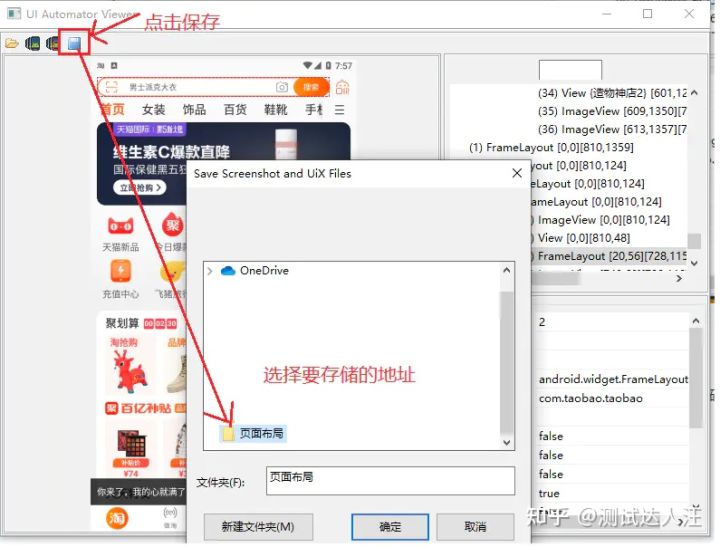
Appium自动化测试基础 — uiautomatorviewer定位工具
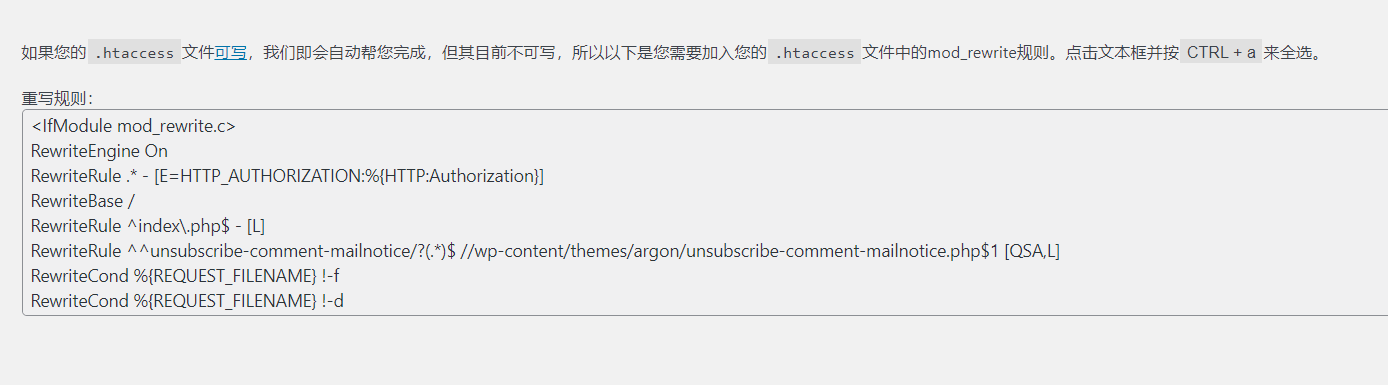
Set WordPress pseudo static connection (no pagoda)

tansig和logsig的差异,为什么BP喜欢用tansig
随机推荐
Set WordPress pseudo static connection (no pagoda)
蓝桥杯2022年第十三届省赛真题-积木画
ROS学习(十九)机器人SLAM功能包——cartographer
According to the analysis of the Internet industry in 2022, how to choose a suitable position?
HDU 4661 message passing (wood DP & amp; Combinatorics)
Hutool post requests to set the body parameter to JSON data
ROS learning (22) TF transformation
Long press the button to execute the function
ROS学习(25)rviz plugin插件
Ros Learning (23) Action Communication Mechanism
一起看看matlab工具箱内部是如何实现BP神经网络的
Amway wave C2 tools
Set up [redis in centos7.x]
Appium基础 — Appium Inspector定位工具(一)
ROS学习(24)plugin插件
tansig和logsig的差异,为什么BP喜欢用tansig
设置Wordpress伪静态连接(无宝塔)
Modify the system time of Px4 flight control
开发中对集合里面的数据根据属性进行合并数量时犯的错误
How to prevent overfitting in cross validation