当前位置:网站首页>Robot team learning method to achieve 8.8 times human return
Robot team learning method to achieve 8.8 times human return
2022-07-07 02:07:00 【Zhiyuan community】
When robots are at risk or unable to complete tasks , Commercial and industrial deployments of robot fleets often rely on remote human remote operators during execution . Through continuous learning , Interventions from remote crowds can also be used to improve robot fleet control strategies over time . A core problem is how to effectively allocate limited human attention to a single robot . Previous work in single robot 、 This problem is solved in a single person environment . We will learn from the interactive team (IFL) Set formalization , Among them, multiple robots interactively query and learn from multiple human supervisors . We provide a fully implemented open source IFL Benchmark Suite , This kit contains GPU Accelerated Isaac Gym Environmental Science , Used to assess IFL Algorithm . We proposed Fleet-DAgger, One IFL Family of algorithms , And a novel Fleet-DAgger Algorithm and simulation 4 Two baselines were compared . We also use 4 individual ABB YuMi The robot arm carried out 1000 Physics push block experiment . Experiments show that , Assigning humans to robots will significantly affect the performance of robot fleets , And our algorithm can achieve higher than the baseline 8.8 Times the human return .

边栏推荐
- Cisp-pte practice explanation (II)
- Livox激光雷达硬件时间同步---PPS方法
- STM32F4---PWM输出
- 使用Ceres进行slam必须要弄清楚的几个类和函数
- POJ 3177 redundant paths POJ 3352 road construction (dual connection)
- RC振荡器和晶体振荡器简介
- LeetCode. Sword finger offer 62 The last remaining number in the circle
- Make DIY welding smoke extractor with lighting
- 解密函数计算异步任务能力之「任务的状态及生命周期管理」
- Image watermarking, scaling and conversion of an input stream
猜你喜欢
ROS学习(25)rviz plugin插件

STM32F4---PWM输出
FLIR blackfly s usb3 industrial camera: white balance setting method
张平安:加快云上数字创新,共建产业智慧生态
Analyze "C language" [advanced] paid knowledge [i]
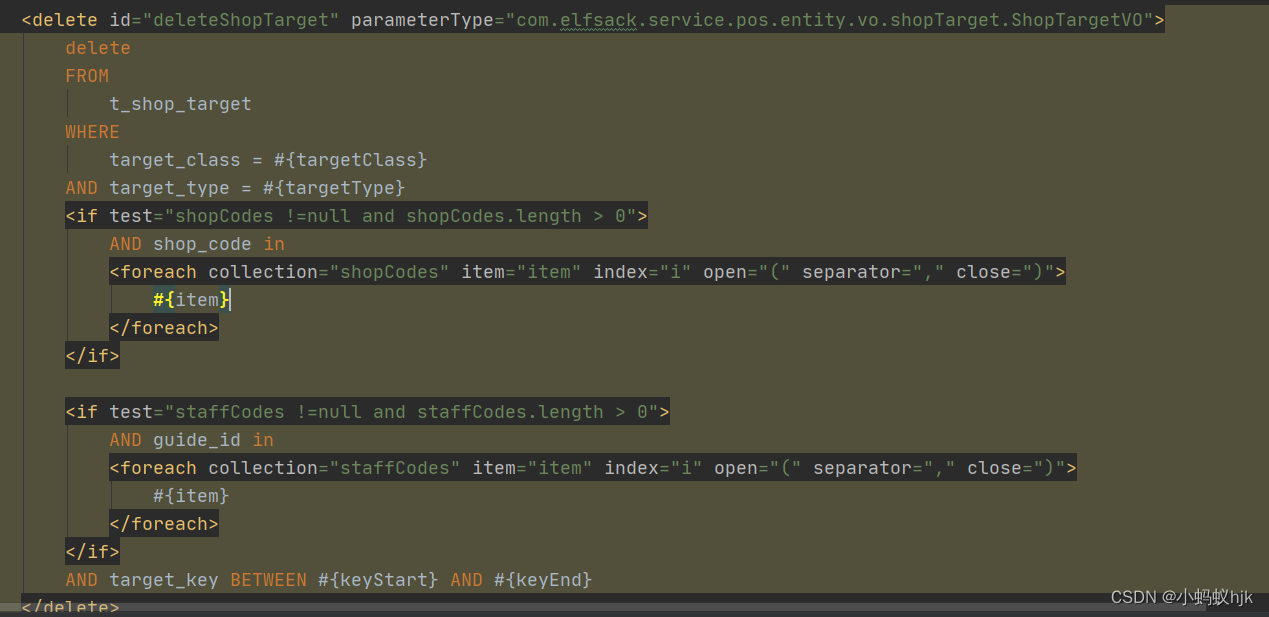
Batch delete data in SQL - set in entity
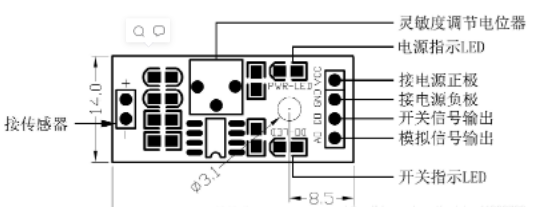
传感器:土壤湿度传感器(XH-M214)介绍及stm32驱动代码
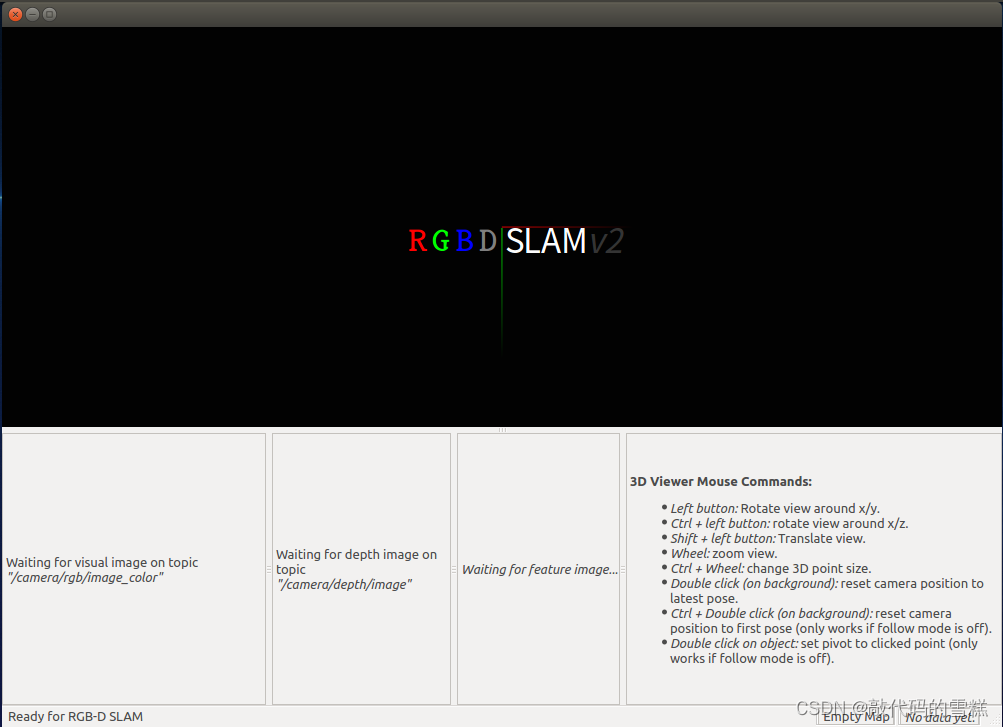
ROS学习(二十)机器人SLAM功能包——rgbdslam的安装与测试
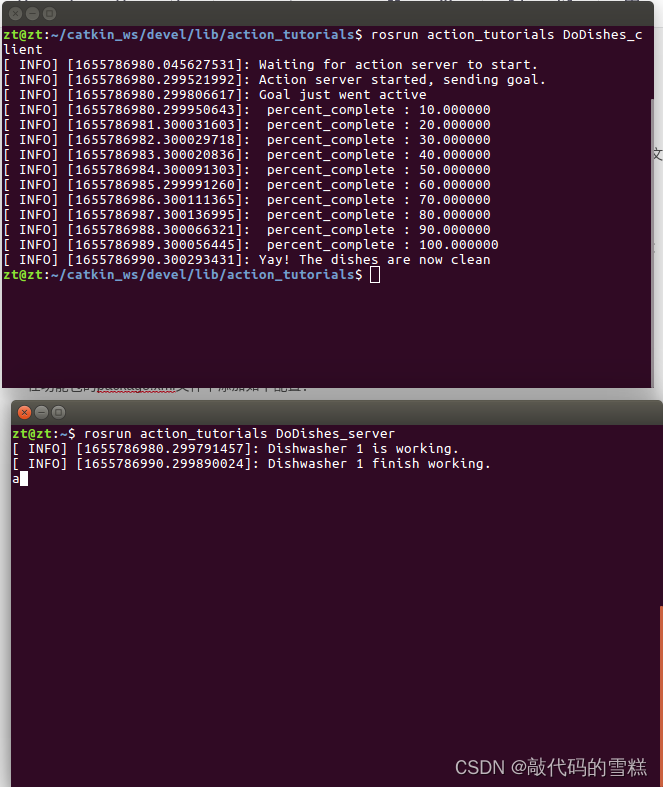
ROS學習(23)action通信機制
刨析《C语言》【进阶】付费知识【二】
随机推荐
MySQL最基本的SELECT(查询)语句
机器人队伍学习方法,实现8.8倍的人力回报
New job insights ~ leave the old and welcome the new~
初识MySQL
Cisp-pte practice explanation (II)
BigDecimal 的正确使用方式
Scenario practice: quickly build wordpress blog system based on function calculation
Analyze "C language" [advanced] paid knowledge [i]
猫猫回收站
Make DIY welding smoke extractor with lighting
Date processing tool class dateutils (tool class 1)
STM32F4---PWM输出
Flir Blackfly S 工业相机:通过外部触发实现多摄像头同步拍摄
刨析《C语言》【进阶】付费知识【一】
字符串的相关编程题
The use of video in the wiper component causes full screen dislocation
Time synchronization of livox lidar hardware -- PPS method
POJ 3177 redundant paths POJ 3352 road construction (dual connection)
Yiwen takes you into [memory leak]
ROS学习(二十)机器人SLAM功能包——rgbdslam的安装与测试