当前位置:网站首页>机器人队伍学习方法,实现8.8倍的人力回报
机器人队伍学习方法,实现8.8倍的人力回报
2022-07-06 18:33:00 【智源社区】
当机器人面临风险或无法完成任务时,机器人车队的商业和工业部署通常会在执行期间依赖远程人类远程操作员。通过持续学习,来自远程人群的干预也可用于随着时间的推移改进机器人车队控制策略。一个核心问题是如何有效地将有限的人类注意力分配给单个机器人。先前的工作在单机器人、单人环境中解决了这个问题。我们将交互式车队学习 (IFL) 设置形式化,其中多个机器人交互地查询并从多个人类主管那里学习。我们提供了一个完全实现的开源 IFL 基准测试套件,该套件包含 GPU 加速的 Isaac Gym 环境,用于评估 IFL 算法。我们提出了 Fleet-DAgger,一个 IFL 算法家族,并将一种新颖的 Fleet-DAgger 算法与仿真中的 4 个基线进行了比较。我们还使用 4 个 ABB YuMi 机械臂进行了 1000 次物理推块实验。实验表明,将人类分配给机器人会显着影响机器人车队的性能,并且我们的算法可实现比基线高 8.8 倍的人力回报。

边栏推荐
猜你喜欢
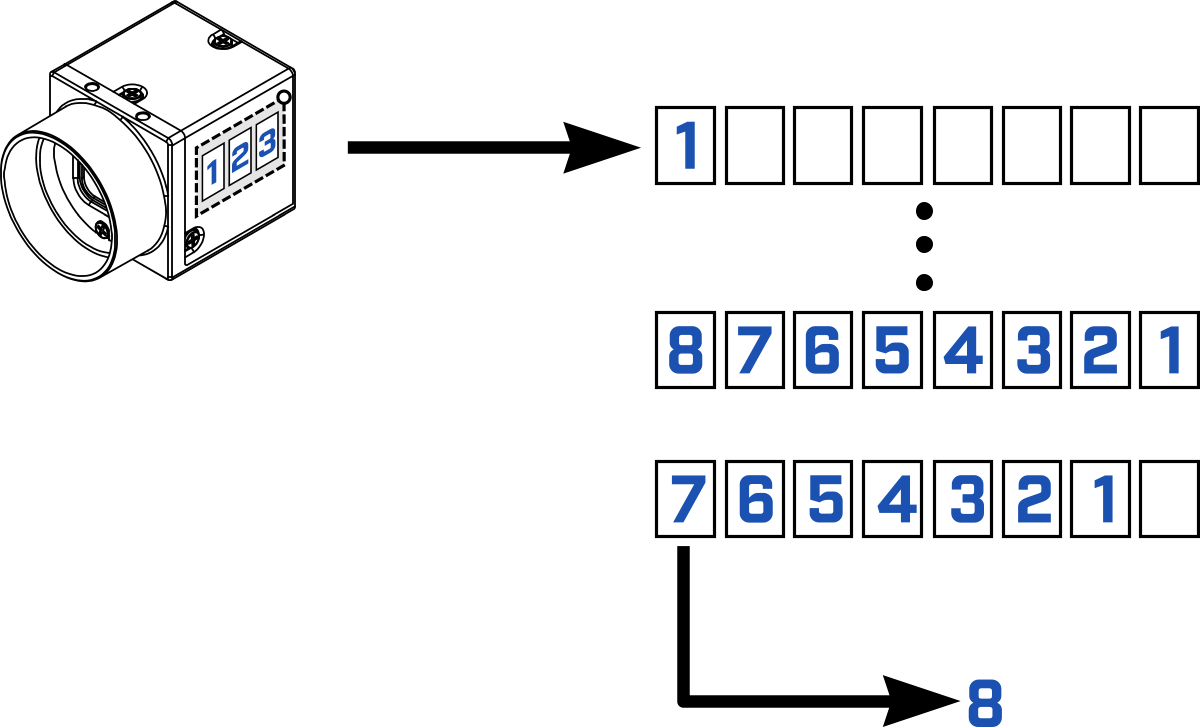
Blackfly S USB3工业相机:缓冲区处理
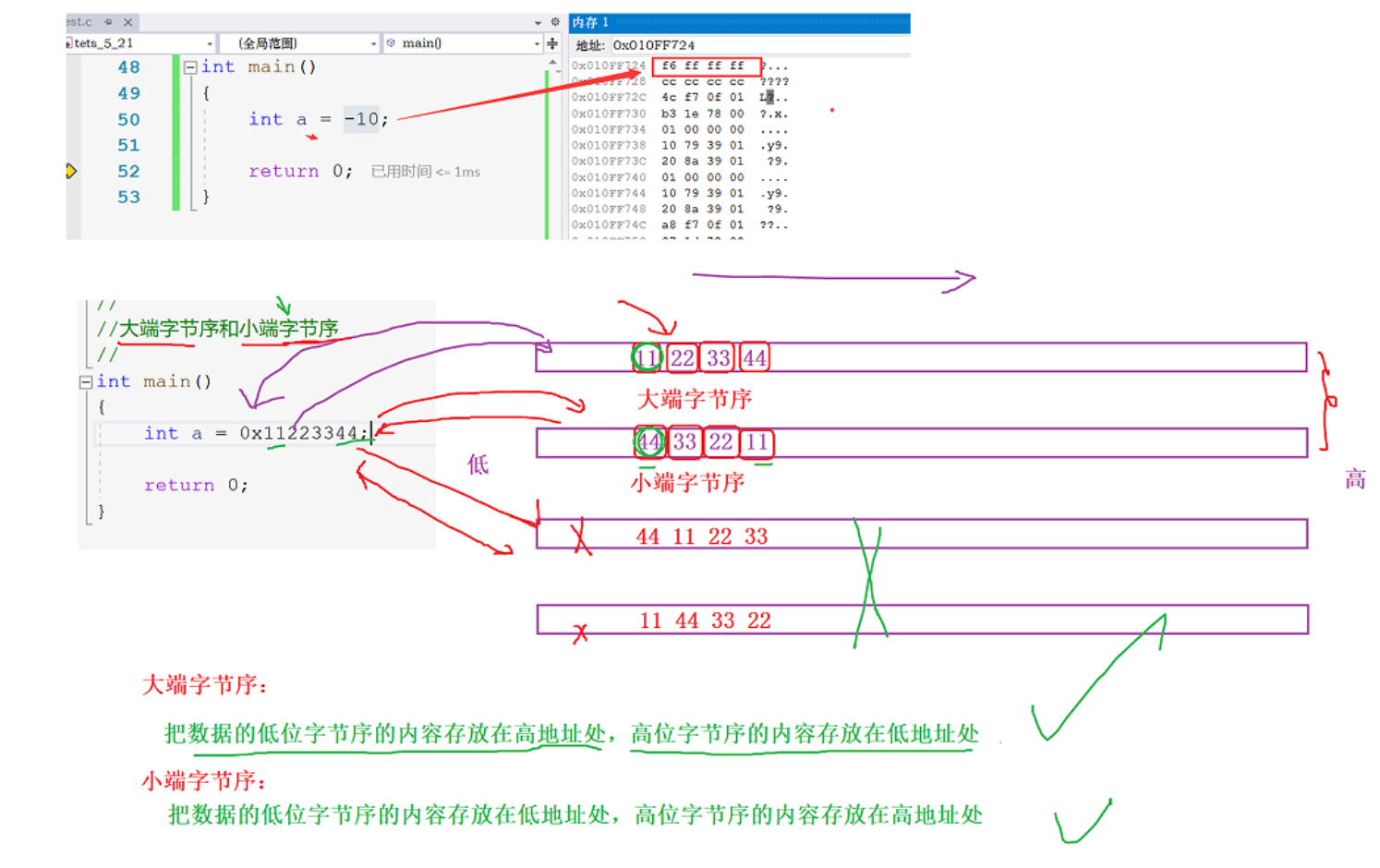
Analyze "C language" [advanced] paid knowledge [End]
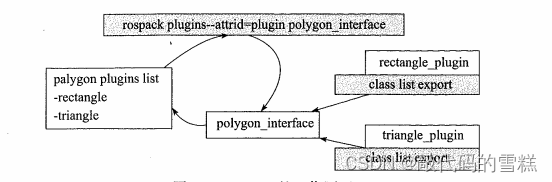
ROS learning (24) plugin

Flir Blackfly S 工业相机:自动曝光配置及代码
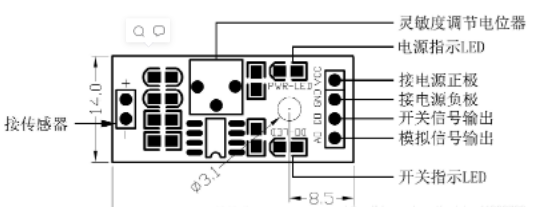
传感器:土壤湿度传感器(XH-M214)介绍及stm32驱动代码
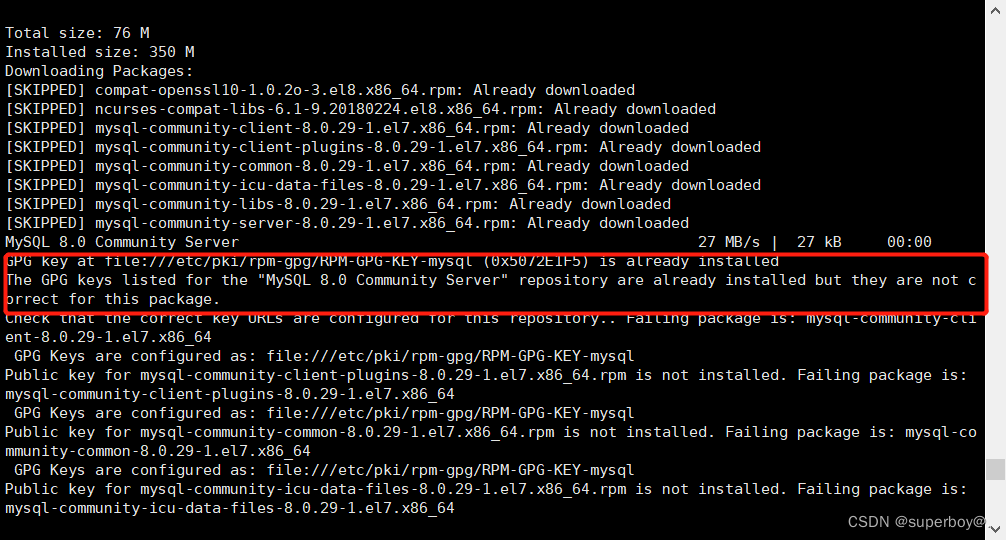
centos8安装mysql报错:The GPG keys listed for the “MySQL 8.0 Community Server“ repository are already ins

Blue Bridge Cup 2022 13th provincial competition real topic - block painting
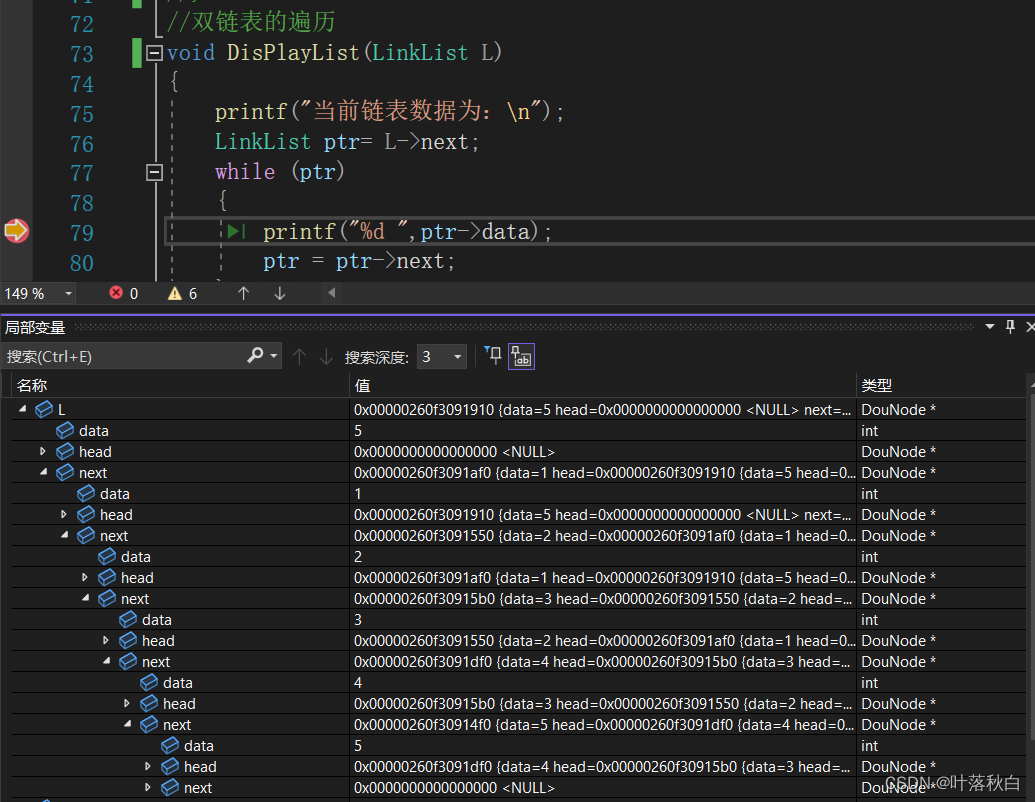
C语言关于链表的代码看不懂?一篇文章让你拿捏二级指针并深入理解函数参数列表中传参的多种形式
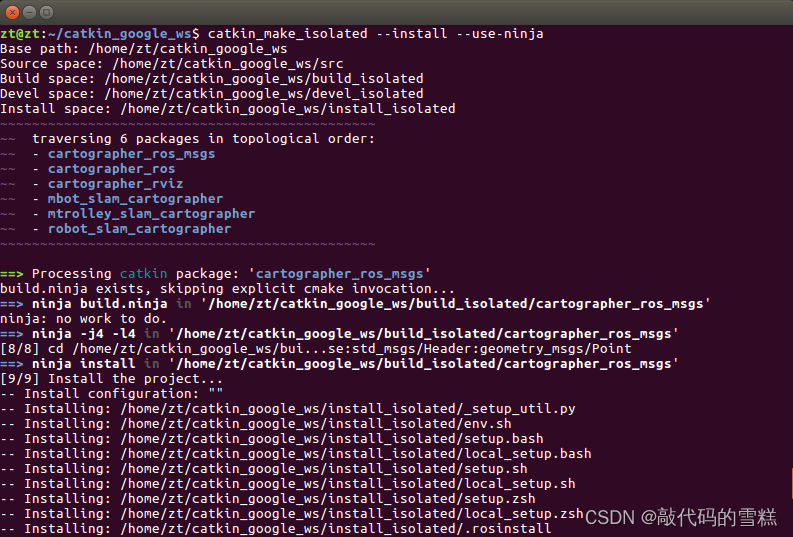
ROS学习(十九)机器人SLAM功能包——cartographer
The cradle of eternity
随机推荐
ROS learning (22) TF transformation
最近小程序开发记录
Shell script quickly counts the number of lines of project code
永久的摇篮
JS ES5也可以创建常量?
Blue Bridge Cup 2022 13th provincial competition real topic - block painting
盒子拉伸拉扯(左右模式)
百度飞将BMN时序动作定位框架 | 数据准备与训练指南 (下)
centos8安装mysql报错:The GPG keys listed for the “MySQL 8.0 Community Server“ repository are already ins
2022 system integration project management engineer examination knowledge point: Mobile Internet
IDEA常用的快捷键
Date processing tool class dateutils (tool class 1)
CISP-PTE之命令注入篇
Correct use of BigDecimal
centos8 用yum 安装MySQL 8.0.x
STM32F4---通用定时器更新中断
Analyze "C language" [advanced] paid knowledge [i]
Add PDF Title floating window
一文带你走进【内存泄漏】
dvajs的基础介绍及使用