当前位置:网站首页>ROS learning (21) robot slam function package -- installation and testing of orbslam
ROS learning (21) robot slam function package -- installation and testing of orbslam
2022-07-07 01:52:00 【Ice cream with code】
List of articles
Preface
In the previous study , We finished rgdbslam Installation and testing of , This article is completed on this basis ORB-SLAM Installation , There are not many things to install here , Before the installation RGBD-SLAM when , Most of them have been installed .
One 、 install Pangolin
Pangolin As a visualization and user interface . You need to install 0.5 Version of Pangolin, If you install the latest version of , Will be in SLAM Error in project compilation .
Pangolin0.5 Download address :
https://github.com/stevenlovegrove/Pangolin/releases/tag/v0.5
Extract to the specified directory , Enter the command as follows :
cd Pangolin-0.5
mkdir build
cd build
cmake ..
make -j
Compile successfully , The effect is as follows :
Continue typing commands , Installation :
sudo make install
After installation , The effect is as follows :
Two 、 compile ORB-SLAM2
To download ORB-SLAM2, The order is as follows :
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
chmod +x build.sh
./build.sh
If compilation is successful , The effect is as follows :
Then you need to add ROS Environmental path , The method is as follows :
open /opt/ros/kinetic/setup.bash file , Add a line of code at the end , namely
export ROS_PACKAGE_PATH=${
ROS_PACKAGE_PATH}:/home/zt/ORB_SLAM2/Examples/ROS
Refresh , The order is as follows :
source setup.sh
Similar to the above file , open ~/.bashrc file , Add a line of code at the end , namely
export ROS_PACKAGE_PATH=${
ROS_PACKAGE_PATH}:/home/zt/ORB_SLAM2/Examples/ROS
Refresh , The order is as follows :
source ~/.bashrc
complete ROS After adding the environment path , Continue to execute the compile command :
cd ORB_SLAM2
chmod +x build_ros.sh
./build_ros.sh
Report errors , as follows :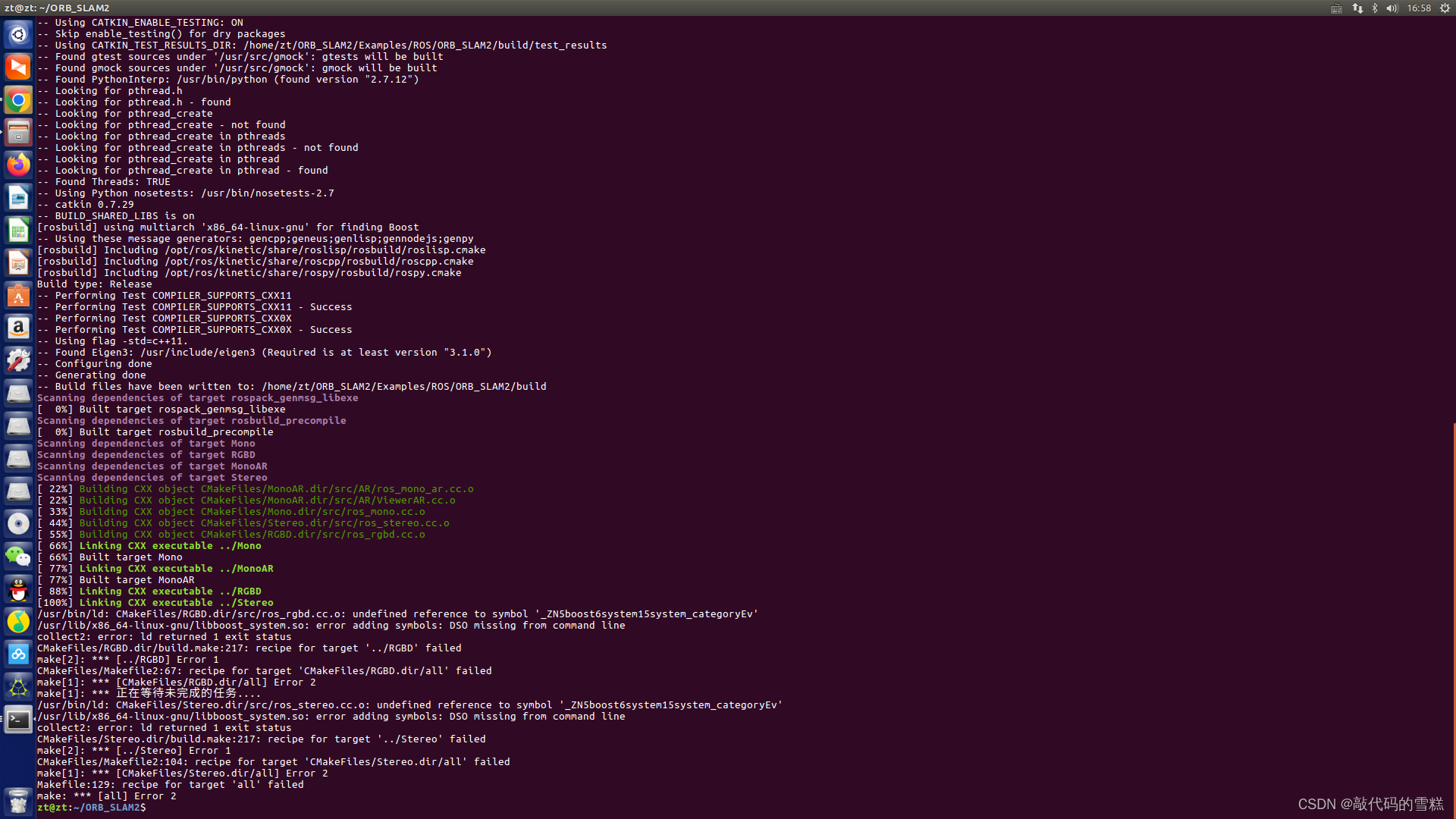
The reason is that the system cannot be found when compiling boost Link library of , The solution is to modify /ORB_SLAM2/Examples/ROS/ORB_SLAM2/CmakeLists.txt, Add a sentence
-lboost_system
Here's the picture :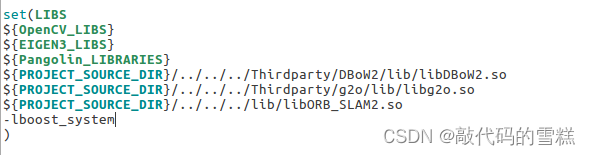
Reenter the command :
./build_ros.sh
Compile successfully , The effect is as follows :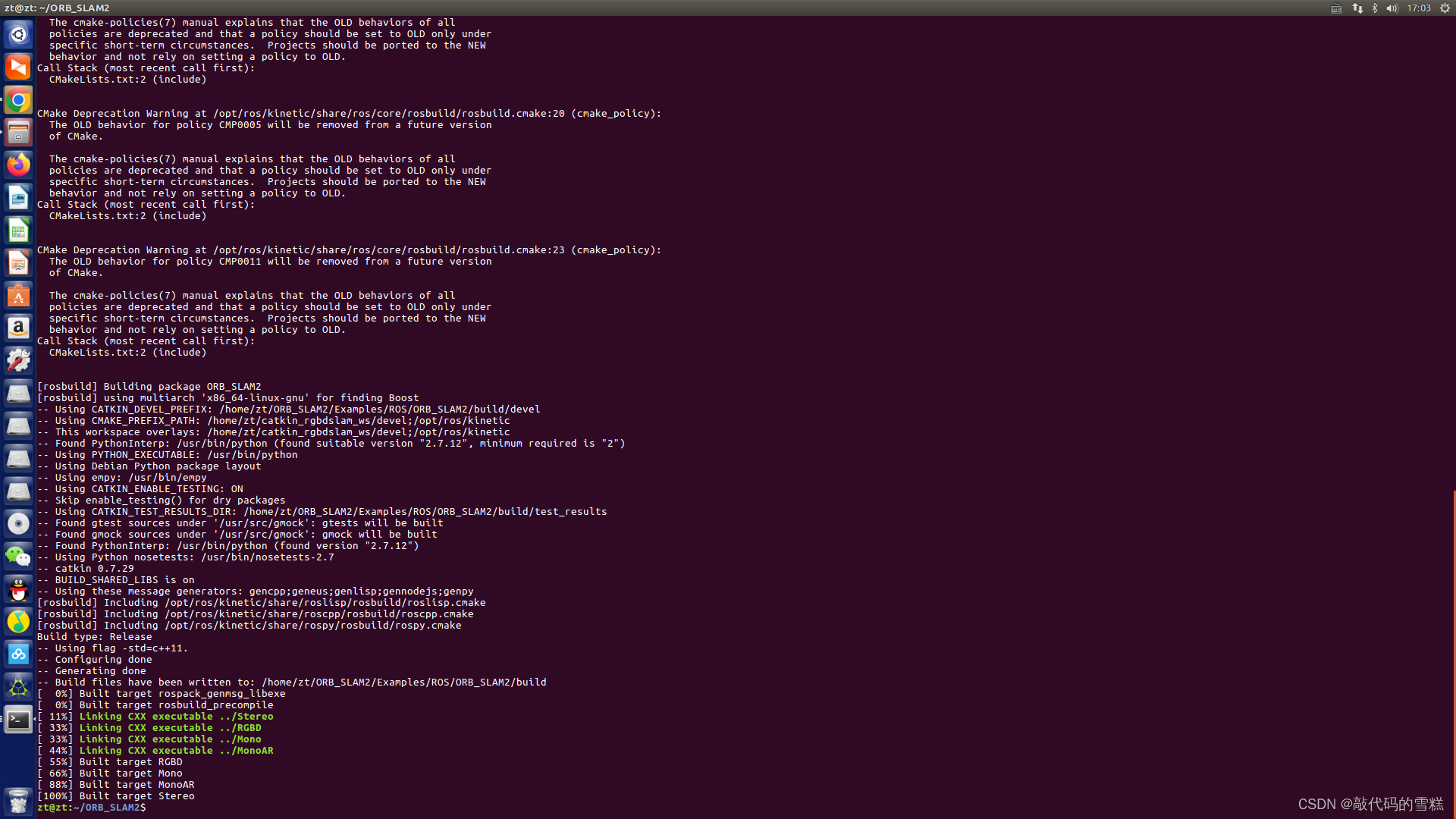
3、 ... and 、 Dataset testing
Open a new terminal , Input :
roscore
Open a new terminal , Input :
rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml
Find the previously downloaded dataset , The file named rgbd_dataset_freiburg1_room.bag, Store in catkin_rgbdslam_ws/rgdb_data Under the table of contents , In this directory , Open a new terminal , Input :
rosbag play rgbd_dataset_freiburg1_room.bag /camera/rgb/image_color:=/camera/image_raw
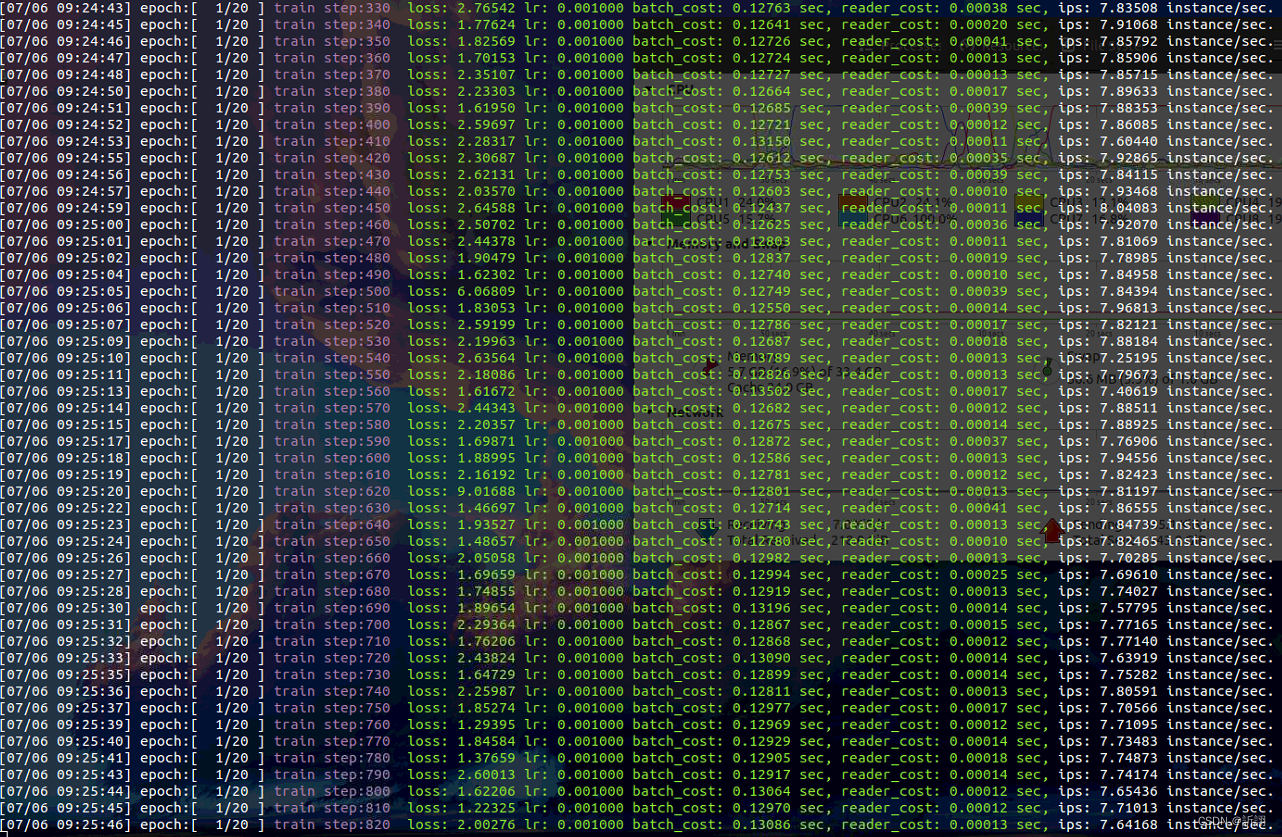
The effect is as follows :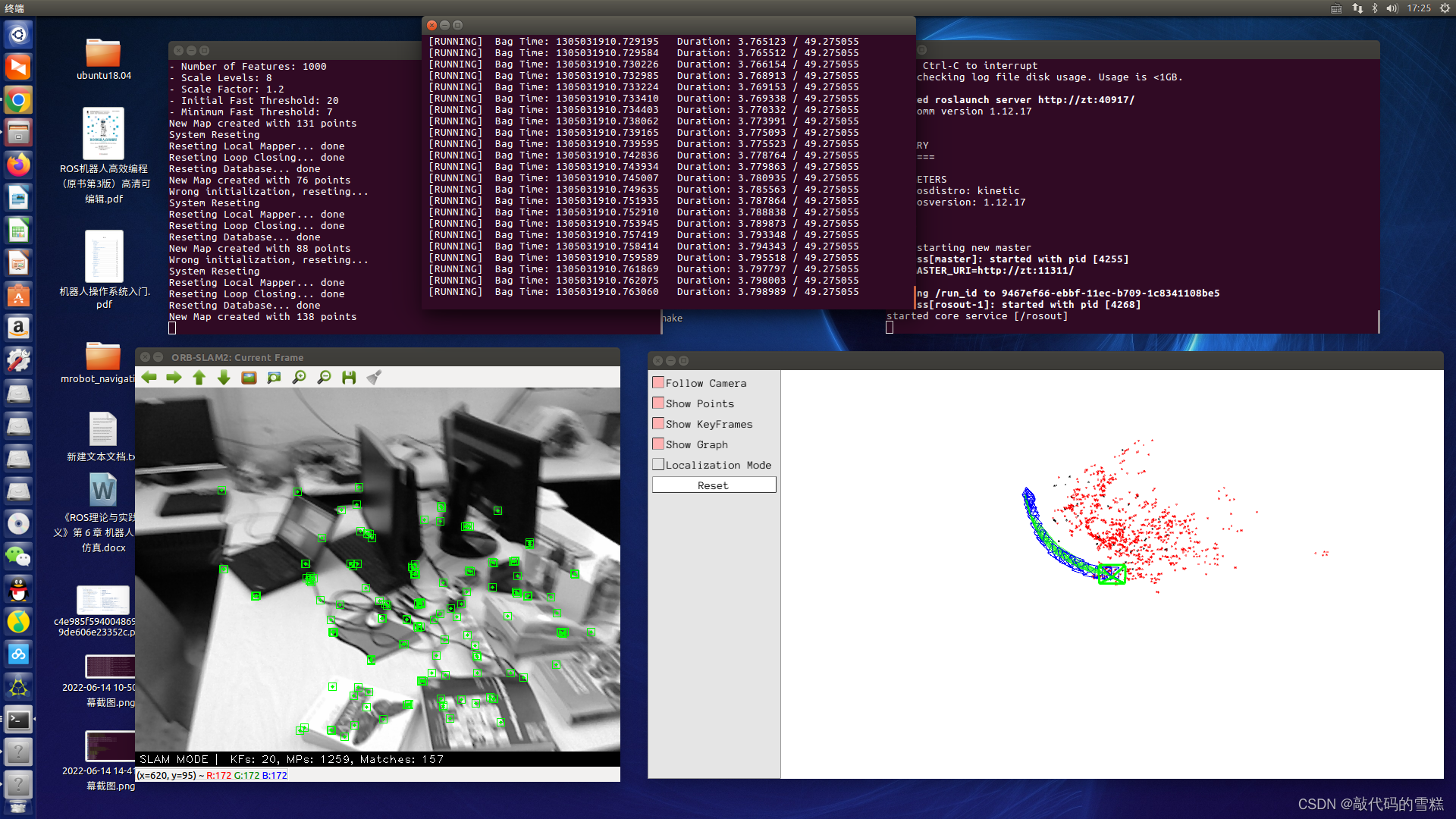
边栏推荐
- New job insights ~ leave the old and welcome the new~
- Yunna - work order management system and process, work order management specification
- 搭建【Redis in CentOS7.x】
- CISP-PTE实操练习讲解(二)
- ROS learning (22) TF transformation
- Shell script quickly counts the number of lines of project code
- 刨析《C语言》【进阶】付费知识【完结】
- Public key \ private SSH avoid password login
- JVM 内存模型
- Add PDF Title floating window
猜你喜欢
Analyze "C language" [advanced] paid knowledge [i]

454-百度面经1
Baidu flying general BMN timing action positioning framework | data preparation and training guide (Part 2)

Modify the system time of Px4 flight control
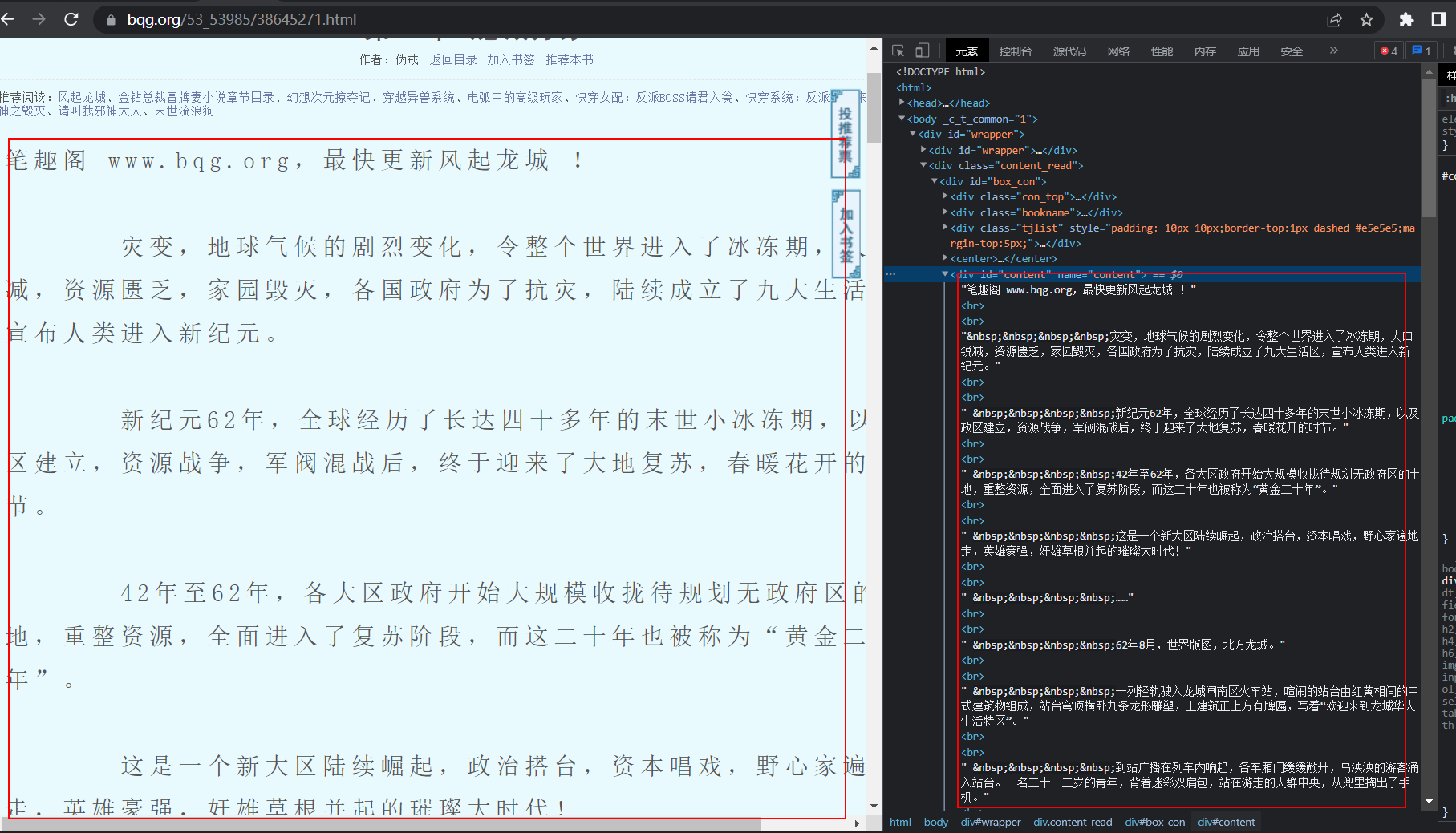
爬虫实战(六):爬笔趣阁小说

Recognition of C language array
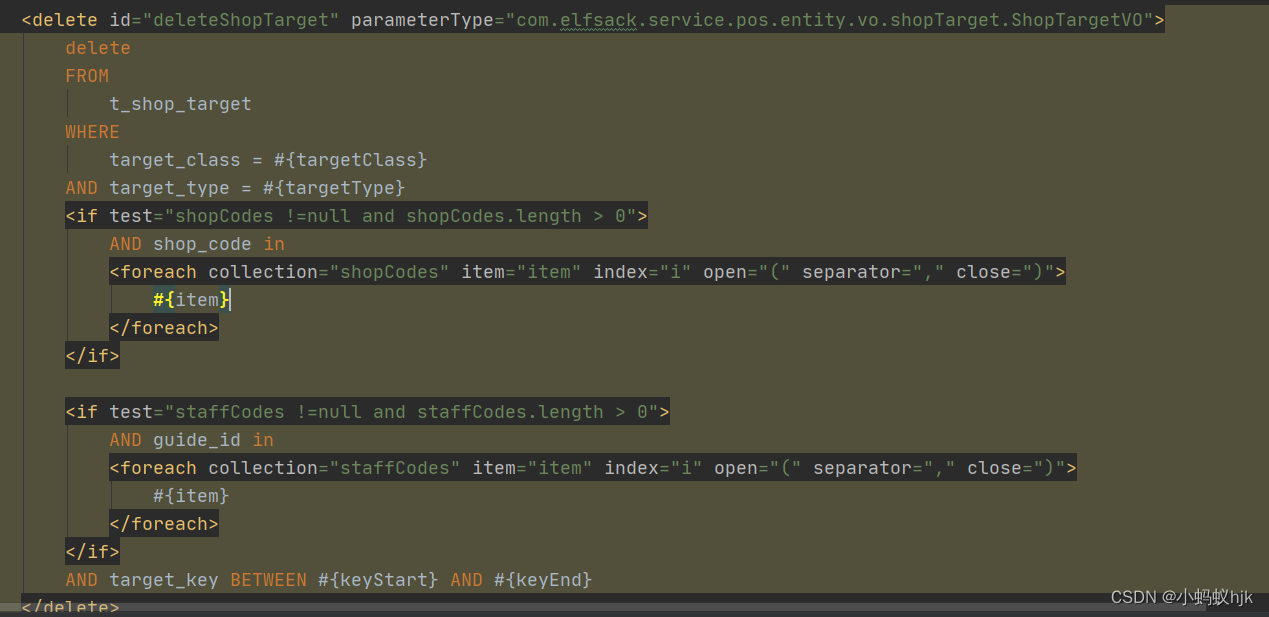
sql中批量删除数据---实体中的集合
The cradle of eternity
Ros Learning (23) Action Communication Mechanism
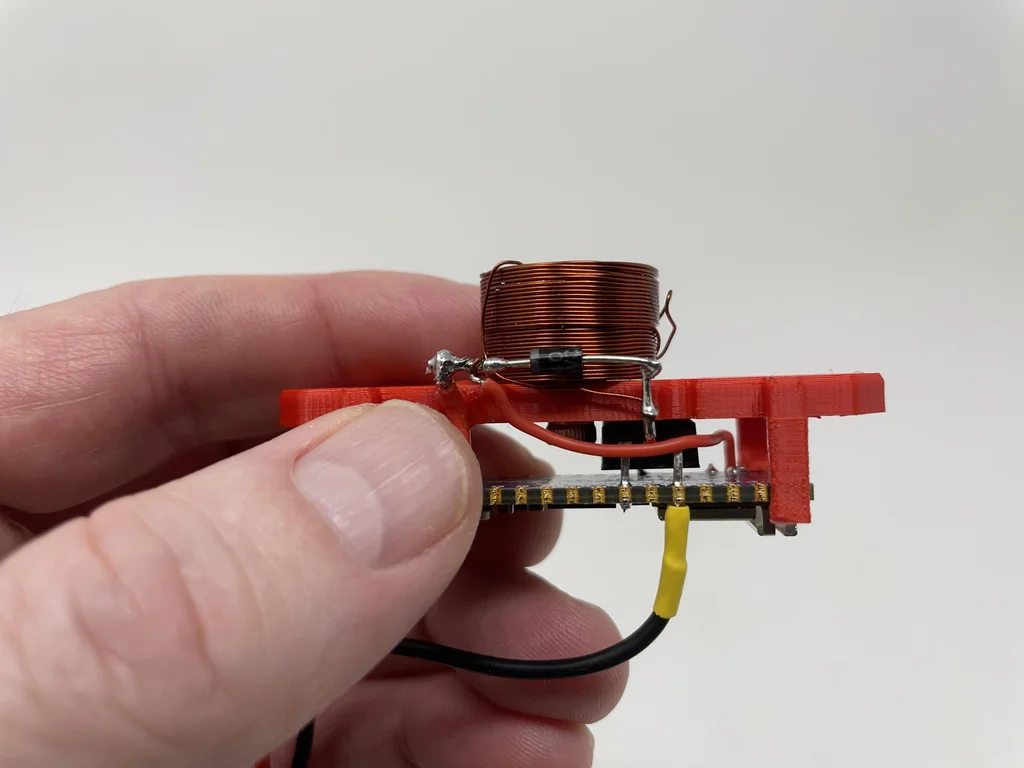
Make DIY welding smoke extractor with lighting
随机推荐
2022/0524/bookstrap
Yunna | work order management software, work order management software app
ROS學習(23)action通信機制
AcWing 1141. 局域网 题解(kruskalkruskal 求最小生成树)
Let's see how to realize BP neural network in Matlab toolbox
刨析《C语言》【进阶】付费知识【二】
Domestic images of various languages, software and systems. It is enough to collect this warehouse: Thanks mirror
C language instance_ three
Add PDF Title floating window
Today's question -2022/7/4 modify string reference type variables in lambda body
Appium自动化测试基础 — uiautomatorviewer定位工具
JS Es5 can also create constants?
LeetCode. 剑指offer 62. 圆圈中最后剩下的数
公钥\私人 ssh避password登陆
ROS学习(23)action通信机制
AcWing 346. Solution to the problem of water splashing festival in the corridor (deduction formula, minimum spanning tree)
Make DIY welding smoke extractor with lighting
AcWing 344. 观光之旅题解(floyd求无向图的最小环问题)
golang 基础 —— 数据类型
C language instance_ five